") 關(guān)于即時定位與地圖構(gòu)建的三個基本問題
關(guān)于即時定位與地圖構(gòu)建的三個基本問題
即時定位與地圖構(gòu)建(Simultaneous LocalizationAnd Mapping)指的是機器人在自身位置不確定的條件下,在完全未知環(huán)境中創(chuàng)建地圖,同時利用地圖進行自主定位和導航。
SLAM問題可以描述為:機器人在未知環(huán)境中從一個未知位置開始移動,在移動過程中根據(jù)位置估計和傳感器數(shù)據(jù)進行自身定位,同時建造增量式地圖。
(1)定位(localization):機器人必須知道自己在環(huán)境中位置。
(2)建圖(mapping):機器人必須記錄環(huán)境中特征的位置(如果知道自己的位置)
(3)SLAM:機器人在定位的同時建立環(huán)境地圖。其基本原理是運過概率統(tǒng)計的方法,通過多特征匹配來達到定位和減少定位誤差的。
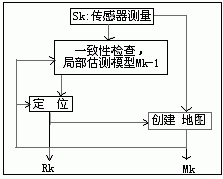
SLAM的基本過程
移動機器人自定位與環(huán)境建模問題是緊密相關(guān)的。環(huán)境模型的準確性依賴于定位精度,而定位的實現(xiàn)又離不開環(huán)境模型。在未知環(huán)境中,機器人沒有什么參照物,只能依靠自己并不十分準確的傳感器來獲取外界信息,如同一個盲人在一個陌生環(huán)境中摸索的情況。這種情況下,定位是比較困難的。有地圖的定位和有定位的地圖創(chuàng)建都是容易解決的,但無地圖的定位和未解決定位的地圖創(chuàng)建如同"雞--蛋"問題,無從下手。
已有的研究中對這類問題的解決方法可分為兩類:一類利用自身攜帶的多種內(nèi)部傳感器(包括里程儀、羅盤、加速度計等),通過多種傳感信息的融合減少定位的誤差,使用的融合算法多為基于卡爾曼濾波的方法。這類方法由于沒有參考外部信息,在長時間的漫游后誤差的積累會比較大。另一類方法在依靠內(nèi)部傳感器估計自身運動的同時,使用外部傳感器(如激光測距儀、視覺等)感知環(huán)境,對獲得的信息進行分析提取環(huán)境特征并保存,在下一步通過對環(huán)境特征的比較對自身位置進行校正。但這種方法依賴于能夠取得環(huán)境特征。
SLAM的三個基本問題
Leonard和Durrant-Whyte將移動機器人完成任務(wù)定義為三個問題“Where am I?”、“Where am I going?”和“How do I get there”,就是定位、目標識別和路徑規(guī)劃,為了能實現(xiàn)導航,移動機器人需要靠本體感受傳感器和環(huán)境感知傳感器來實現(xiàn)對本體位姿估計和外部環(huán)境位姿的定位。依據(jù)環(huán)境空間的描述方法,Desouza等將視覺導航的方法化為三類:
(1)已知地圖的導航(Map-Based Navigation):表示地圖的方法幾何特征(Geometric Primitives)、拓撲特征(Topological Features)或占據(jù)柵格(Occupancy Grids)移動機器人依據(jù)這些已知的環(huán)境地圖進行導航。
(2)地圖建立的導航(Map-Building-Based Navigation):在沒有已知環(huán)境地圖的情況下,移動機器人通過自身的導航運動和傳感器的不斷感知更新來進行導航。
(3)未知環(huán)境的導航(Mapless Navigation):相對于上面兩種方法,在實時的動態(tài)環(huán)境中無法建立明確的地圖表達形式,更多的是通過傳感器獲得的觀測信息用來識別或者跟蹤環(huán)境中的物體來導航。
SLAM技術(shù)主要應(yīng)用于無人駕駛、無人機、虛擬現(xiàn)實三個領(lǐng)域
但是由于感知信息的不確定性,移動機器人很難實現(xiàn)定位的準確,因而,在未知環(huán)境中的定位成為最關(guān)鍵的問題。
定位(Where am I?)是實現(xiàn)自主能力的最基本問題,是為了確定機器人在運行環(huán)境中相對于世界坐標系的位置及其本身的位姿。
移動機器人的定位與其它領(lǐng)域研究課題的關(guān)系如圖所示:
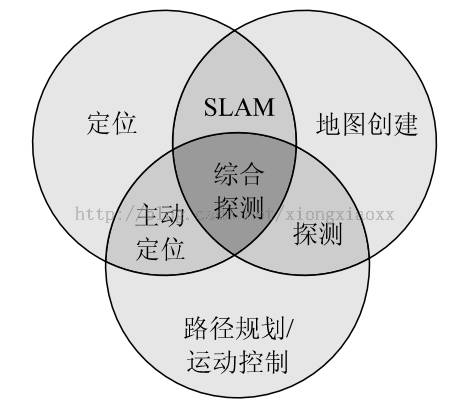
SLAM與各領(lǐng)域關(guān)系圖
現(xiàn)有的移動機器人自主定位方法主要是局部定位和全局定位。局部是通過測量相對于機器人初始位姿的距離和方向來確定當前的位姿,但隨著時間的累計造成定位的誤差較大,無法精確定位。全局定位則通過測機器人的絕對位置來定位,定位的精度較高,并且可以用來修正局部定位的定位誤差。
現(xiàn)在移動機器人定位的方法大致可分為三類
(1)相對定位(Relative Position Measurements):主要依靠內(nèi)部本體感受傳感器如里程計(Odometry)、陀螺儀(Gyroscopes)等,通過給定初始位姿,來測量相對于機器人初始位姿的距離和方向來確定當前機器人的位姿,也叫做航跡推測(Dead Reckoning,DR)。
(2)絕對定位(Absolute Position Measurements):主要采用主動或被動標識(Activeor Passive Beacons)、地圖匹配(Map Matching)、全球定位系統(tǒng)(Global Positioning System, GPS)、或?qū)Ш叫艠?LandmarkNavigation)進行定位。位置的計算方法包括有三角測量法(Triangulation)、三邊測量法(Trilateration)和模型匹配算法(ModelMatching)等。
(3)組合定位(Combined Position Method):雖然相對定位這種方法能夠根據(jù)運動學模型的自我推算移動機器人的位姿和軌跡而且具有自包含的有點。但是不可避免地會存在隨時間的增加和距離的增加而增加的累積航跡誤差。在絕對定位中,地圖匹配技術(shù)處理數(shù)據(jù)速度較慢,而信標或標識牌的建設(shè)和維護成本太高,GPS又只能在室外使用。由于單一定位的方法的缺陷,移動機器人定位仍然是基于航跡的推算與絕對位姿和軌跡矯正相結(jié)合起來。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763374 -
機器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211428 -
激光測距儀
+關(guān)注
關(guān)注
2文章
94瀏覽量
15456 -
SLAM
+關(guān)注
關(guān)注
24文章
435瀏覽量
32307
原文標題:關(guān)于SLAM(即時定位與地圖構(gòu)建)的三個基本問題
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
關(guān)于物聯(lián)網(wǎng)的三個好問題和三個好回答
感知、地圖與駕駛構(gòu)成Mobileye在智能汽車領(lǐng)域策略
即時定位與地圖構(gòu)建技術(shù)讓機器人也能認路
怎么構(gòu)建一張滿足機器人導航需求的地圖?
一種同時定位與地圖構(gòu)建的仿真系統(tǒng)
同時定位與地圖構(gòu)建(SLAM)概述2
基于VSLAM的移動機器人三維定位與地圖構(gòu)建

關(guān)于MES與ERP的三個問題
從三個方面展開談?wù)摳呔?b class='flag-5'>地圖
數(shù)據(jù)鏈路層的三個基本問題
如何才能實現(xiàn)移動機器人的導航定位和地圖構(gòu)建技術(shù)
移動機器人的導航定位和地圖構(gòu)建技術(shù)綜述






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論