") 教你10分鐘完成智能小車的PID調(diào)速
教你10分鐘完成智能小車的PID調(diào)速
01前言
本次采用Simulink工具鏈完成,小車的所有代碼均基于Simulink Target Support Package完成。
02所需要的硬件&軟件
2.Arduino Due控制板及數(shù)據(jù)線(類似dSPACE MAB進行RCP開發(fā),但是性能完全沒有可比性,開個玩笑)。
3.Matlab&Simulink R2019b (民間通用版本即可)。
4.電腦一臺。
03前期準備工作
(1)安裝Arduino硬件支持包
這并不是本文的重點,網(wǎng)上有許多這方面的教程,包括MATLAB錄制的研討會均有類似的視頻教程。有意的同學可以自行查閱相關(guān)資料,十分簡單。
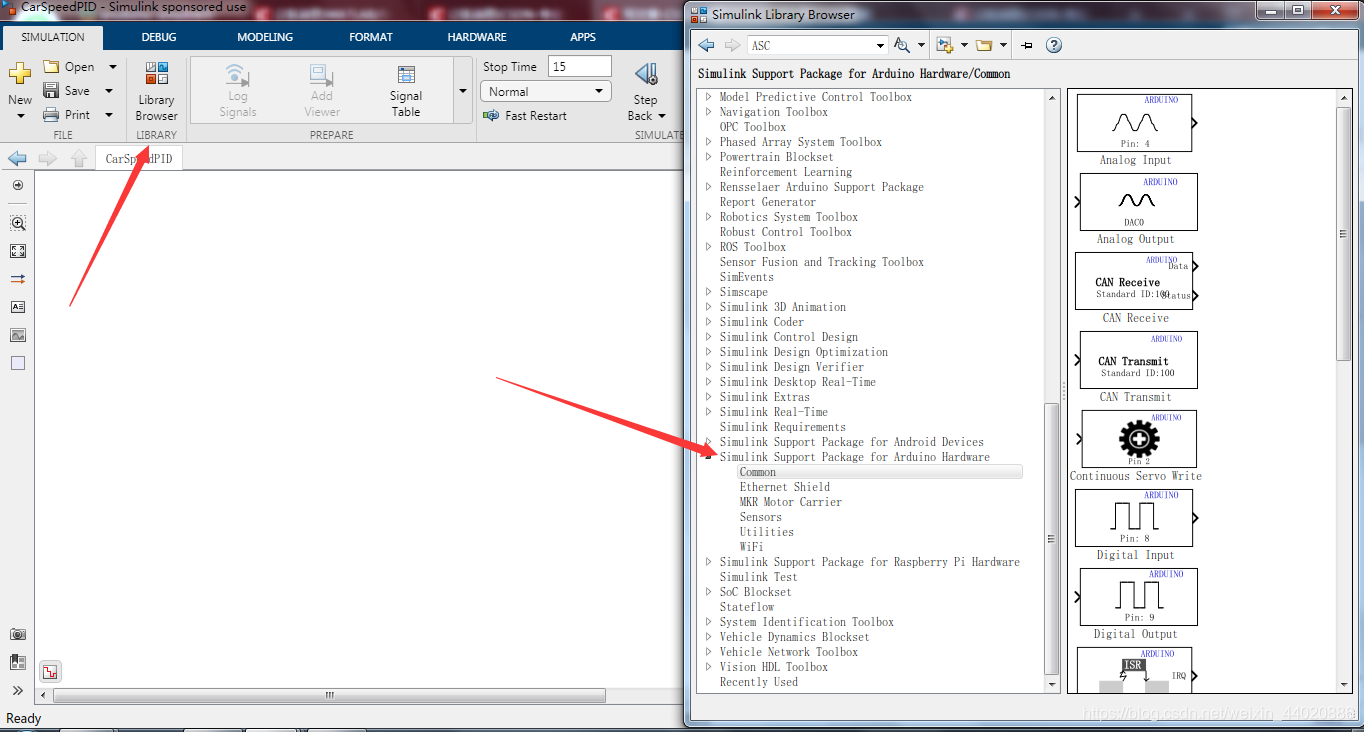
(2)Simulink模型
新建Simulink Model,并且打開Library Browser。 找到Simulink Supprot Package for Arduino Hardware
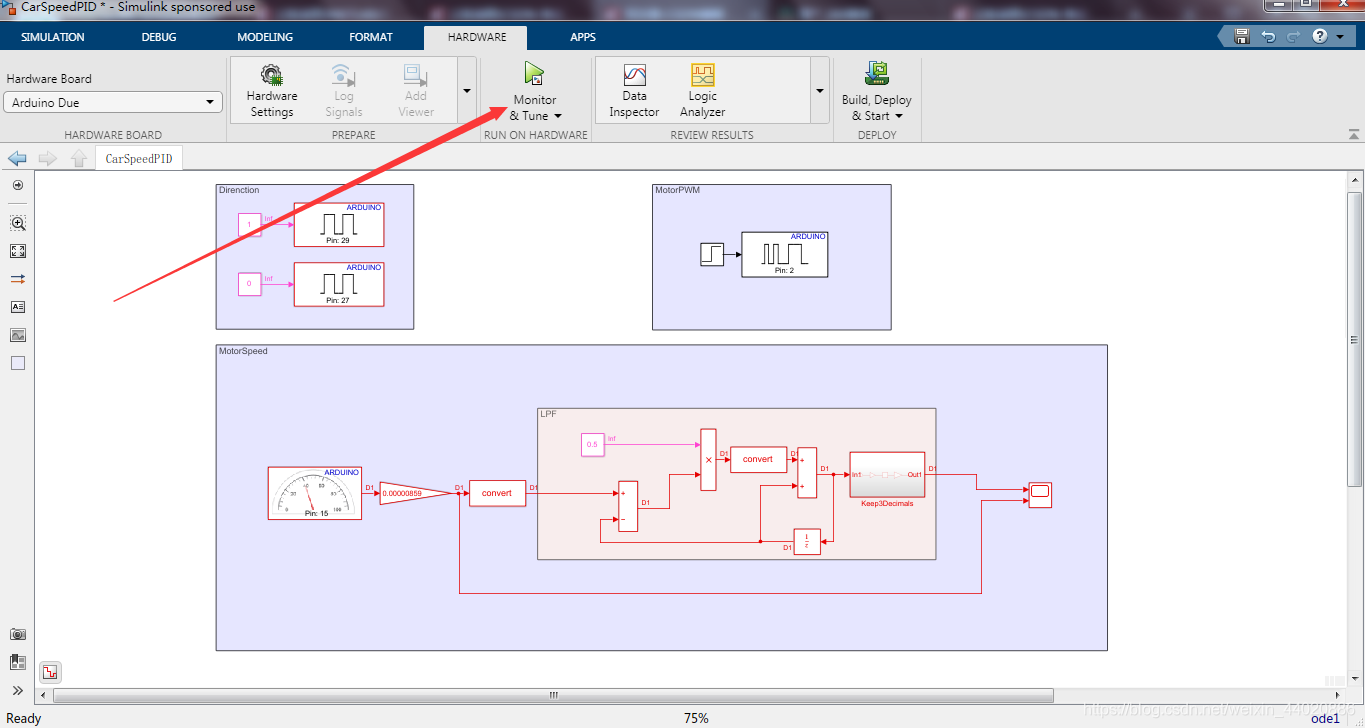
按照下圖搭建模型。 其中Tachometer模塊在硬件支持包中的Sensor模塊里(2019b有,低版本2018a并沒有。
需要自己通過編碼器脈沖的上升沿或者下降沿捕獲進行)具體通過高低電平進行捕獲的模型在硬件支持包中的DrivePID例程中的Encoder子模塊中有搭建。
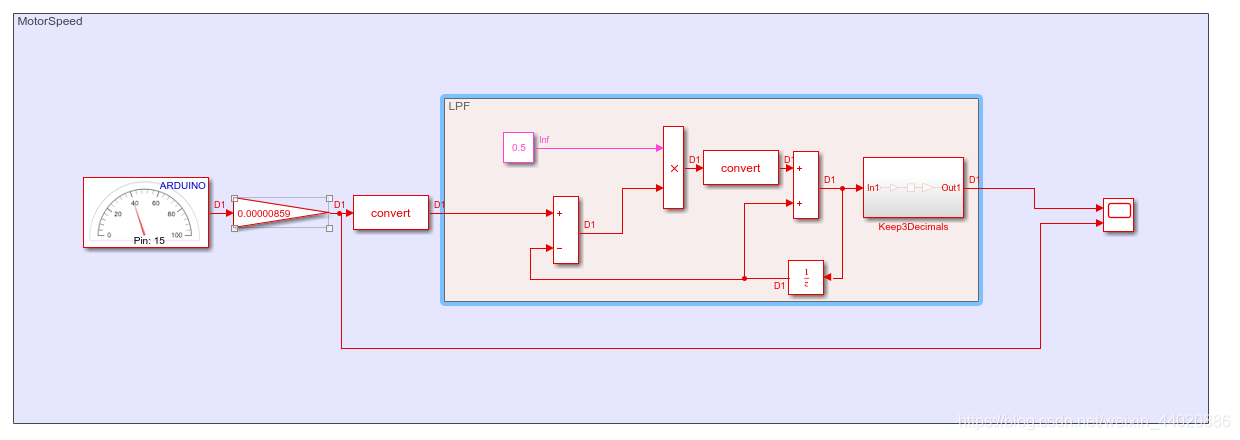
可以看到,Tachometer輸出量并不是help中講的RPM,而是脈沖/每分鐘。
Tachometer模塊中設(shè)置的即是編碼器的單個信號線連接的PIN口(這里用一根信號線就無法測量方向了,請注意編碼器信號線是5V電壓,本次使用的單片機IO最高容忍3.3V,需要初中知識進行分壓電路的搭建,如果使用其他芯片,請查詢數(shù)據(jù)手冊該IO口的最高容忍電壓),采樣時間設(shè)置0.05即可。
由于我智能小車輪子轉(zhuǎn)一圈采集390個脈沖,輪子直徑64毫米。 所以簡單計算即可得到輪速轉(zhuǎn)一圈行駛的距離,單位m/s。
后面經(jīng)過了一個一階低通濾波器,這個在網(wǎng)上可以找到關(guān)于一階低通濾波的公式,然后進行搭建,這里就不是贅述了。
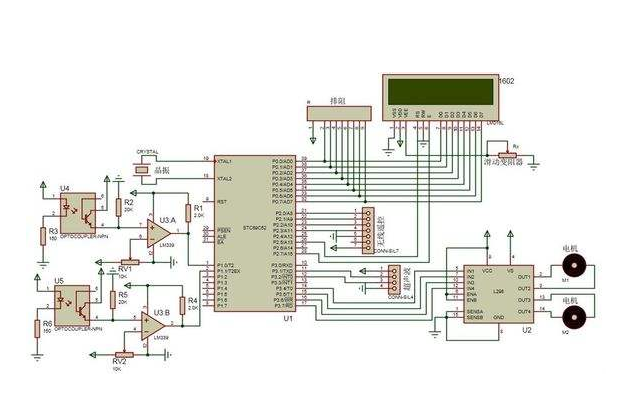
接下來進行驅(qū)動模塊的搭建,關(guān)于L298N驅(qū)動模塊的使用,這里我使用一路電機進行調(diào)試,29和27PIN腳設(shè)置成高電平和低電平,PIN2設(shè)置為ENA。 在Arduino 支持包中,PWM模塊輸入值0-255對應(yīng)0-100%占空比,PWM頻率在Due中驅(qū)動模塊固定1KHz。
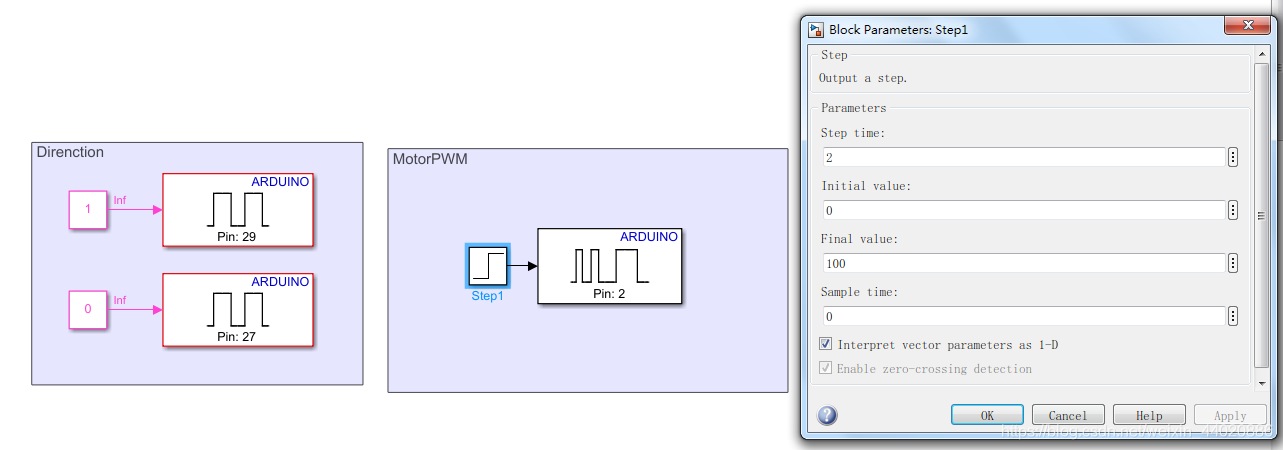
Step階躍信號目的在于仿真時間2s時進行階躍輸入,占空比改變至100,我們需要做的就是進行數(shù)據(jù)記錄,記錄本次仿真的時間,輸入和輸出。
如何記錄呢,那么我們需要在相應(yīng)的信號線上右鍵, 選擇Log Selected Signals。我們需要對Step輸出線,低通濾波后的速度進行Datalog。
最后設(shè)置Arduino外部仿真調(diào)試環(huán)境。
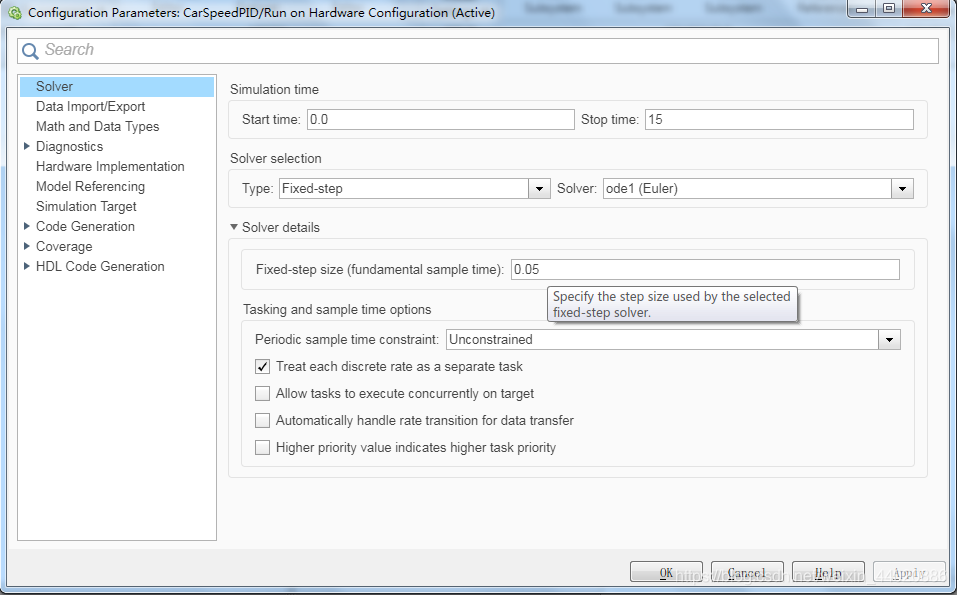
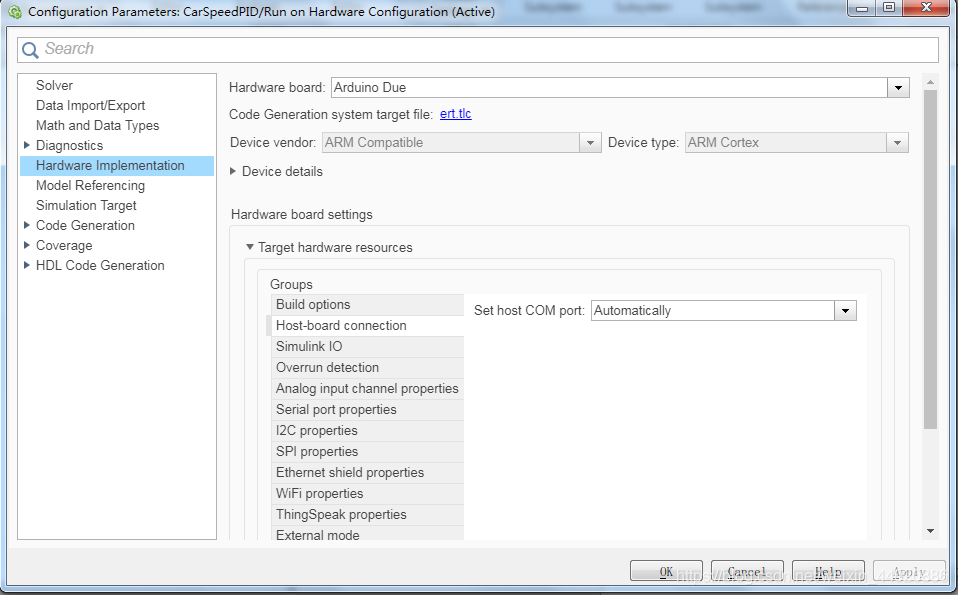
在Set COM port端口中可以手動輸入您的硬件串口號如果在上傳程序失敗的時候。 接下來進行在線調(diào)試,類似keil軟件中的debug模式。
在2019b以下版本的同學點擊仿真按鈕旁邊的下拉菜單選擇External模式即可。
我在使用2018a版本無法進行數(shù)據(jù)datalog,可以通過串口進行數(shù)據(jù)傳輸,具體請查閱相關(guān)資料。
點擊按鈕開始離線仿真,模型會編譯成代碼刷寫進硬件。
前期準備工作完成,相信無論用基于模型設(shè)計的方式還是手動寫代碼的方式,完成以上工作都不會難。
接下來就進入本次教程的正題。
04正題
數(shù)據(jù)導(dǎo)出到Workspace
如圖所示,點擊Data Inspector
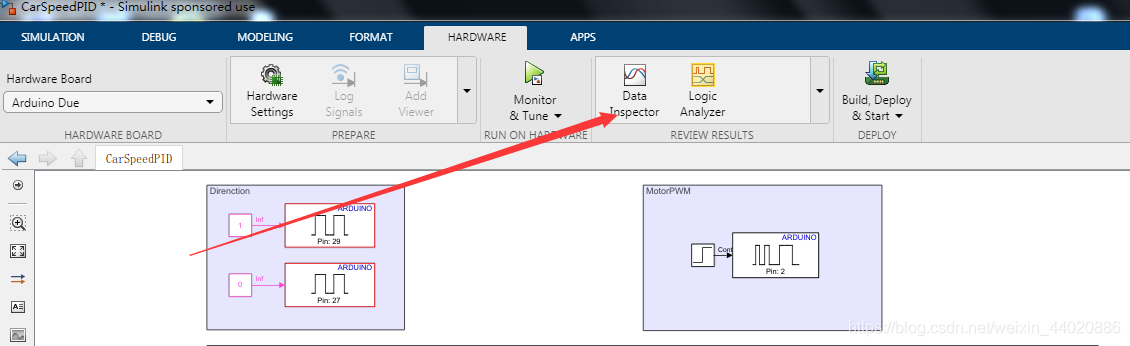
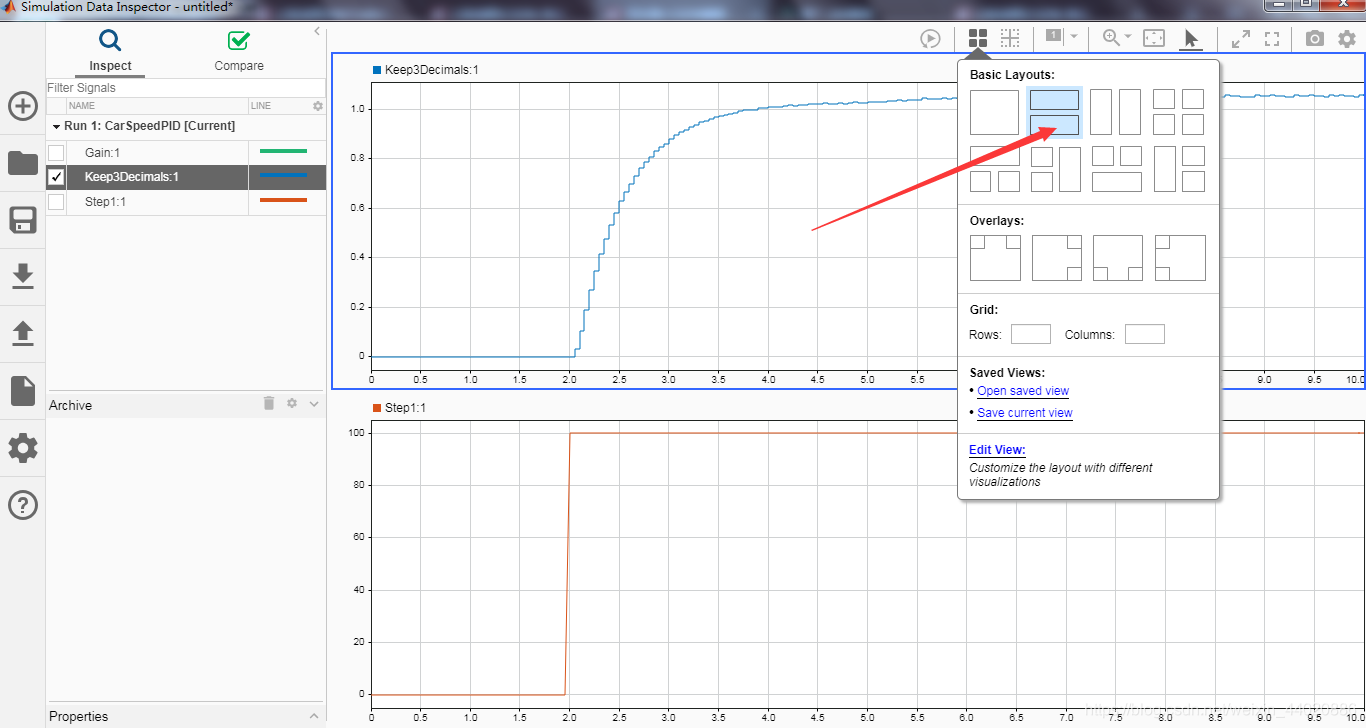
分別將左側(cè)數(shù)據(jù)拖入進對應(yīng)的框圖即可查看數(shù)據(jù)記錄效果,如果您已經(jīng)有小車并且已經(jīng)進行開環(huán)PWM測速,您需要關(guān)注以下的每一步。
只要您有相應(yīng)的PWM和速度值都可以使用以下方法進行PID調(diào)速,不僅限于使用Aruduino類似的快速原型開發(fā)。
如圖所示,右鍵數(shù)據(jù),進行導(dǎo)出,導(dǎo)出至Workspace即可。
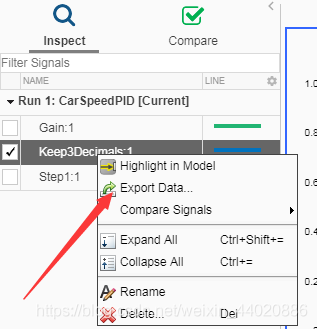
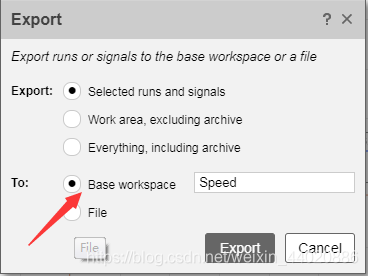
同樣的方式將兩組數(shù)據(jù)全部導(dǎo)出,分別是PWM和Speed。
返回Matlab主界面,您會看在工作空間看到如下圖所示。

使用代碼即可將數(shù)據(jù)解析出來,如下圖所示。

再看工作空間內(nèi)容,即可得到我們熟悉的數(shù)據(jù)類型。
系統(tǒng)辨識
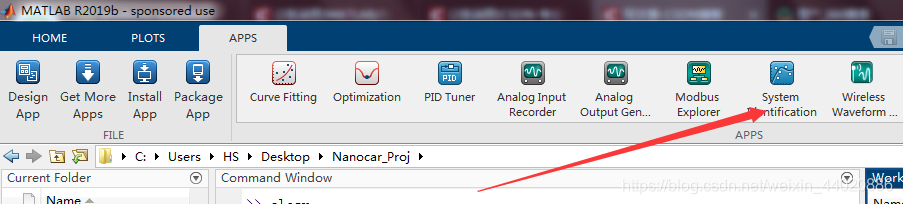
我們通過輸入和輸出基于Matlab的System Identification工具箱即可辨識出小車驅(qū)動的傳遞函數(shù),從而進行PID整定。 具體方法如下。
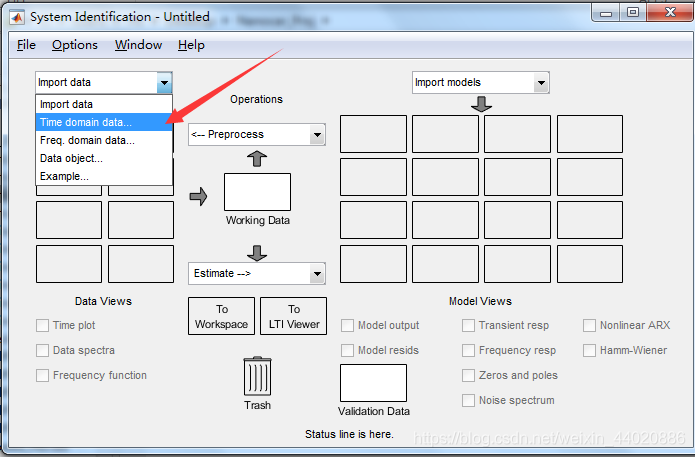
打開系統(tǒng)辨識工具箱。
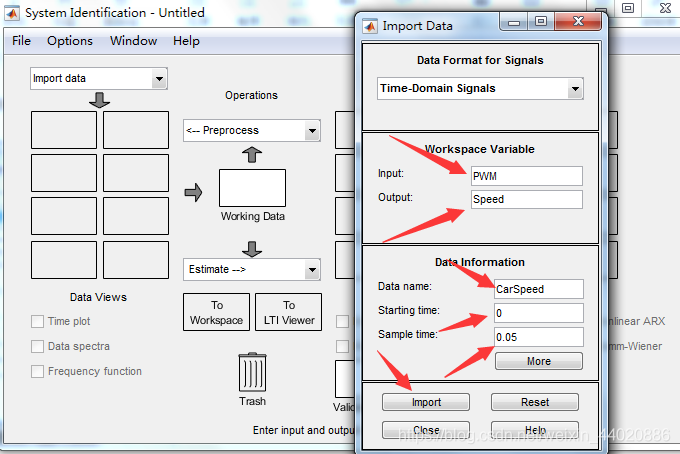
將時域數(shù)據(jù)導(dǎo)入。
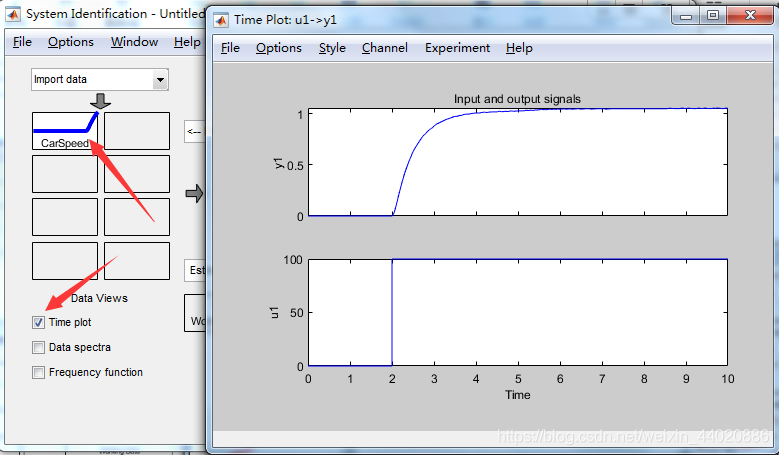
導(dǎo)入后,點擊導(dǎo)入后的曲線,然后點擊Time Plot即可查看曲線。
然后如圖選擇系統(tǒng)估計的模式。
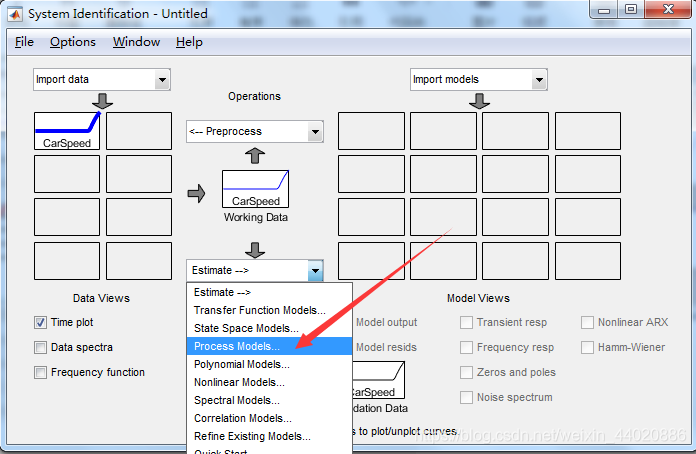
您可以根據(jù)您的需要選擇辨識的傳遞函數(shù)結(jié)構(gòu),這里我選擇二階振蕩模型。
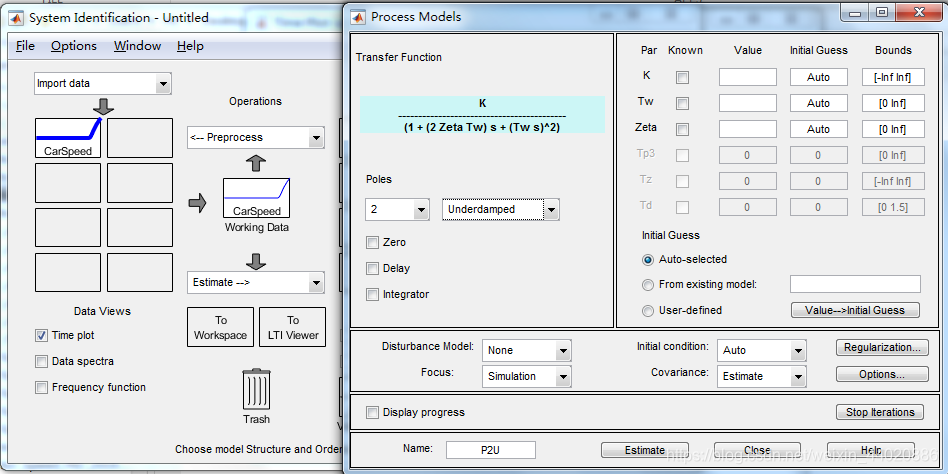
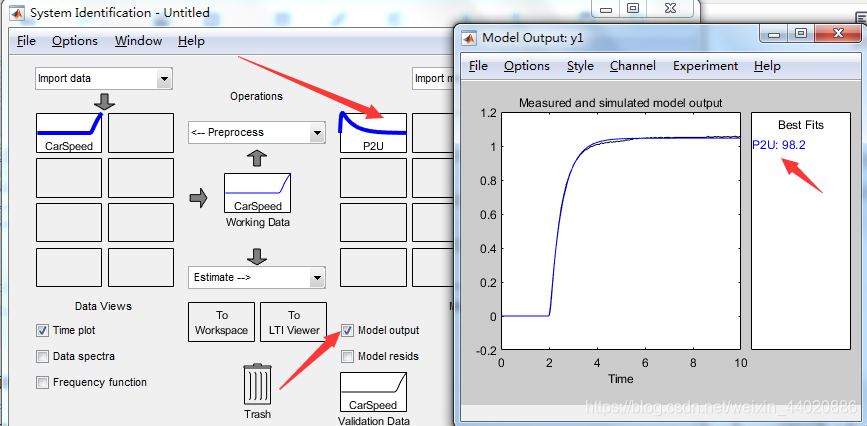
然后點擊Estimate,稍等片刻,可以在工具箱主界面查看我們的辨識結(jié)果,高亮辨識后的曲線,點擊Model Output,即可查看辨識曲線。
我辨識出來后的重合度達到98.2,效果還是可觀的。
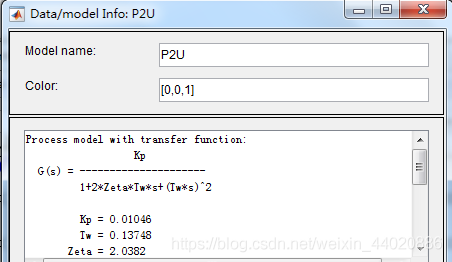
這一步的最后,右鍵上面的辨識曲線,即出現(xiàn)需要的傳遞函數(shù)參數(shù)了。
離線仿真
得到系統(tǒng)的傳遞函數(shù),那當然是十分愉悅的事情,在學習控制理論的時候總是先給出系統(tǒng)模型,但是在實際項目中模型是需要辨識的,這就是課本和實際的差距。
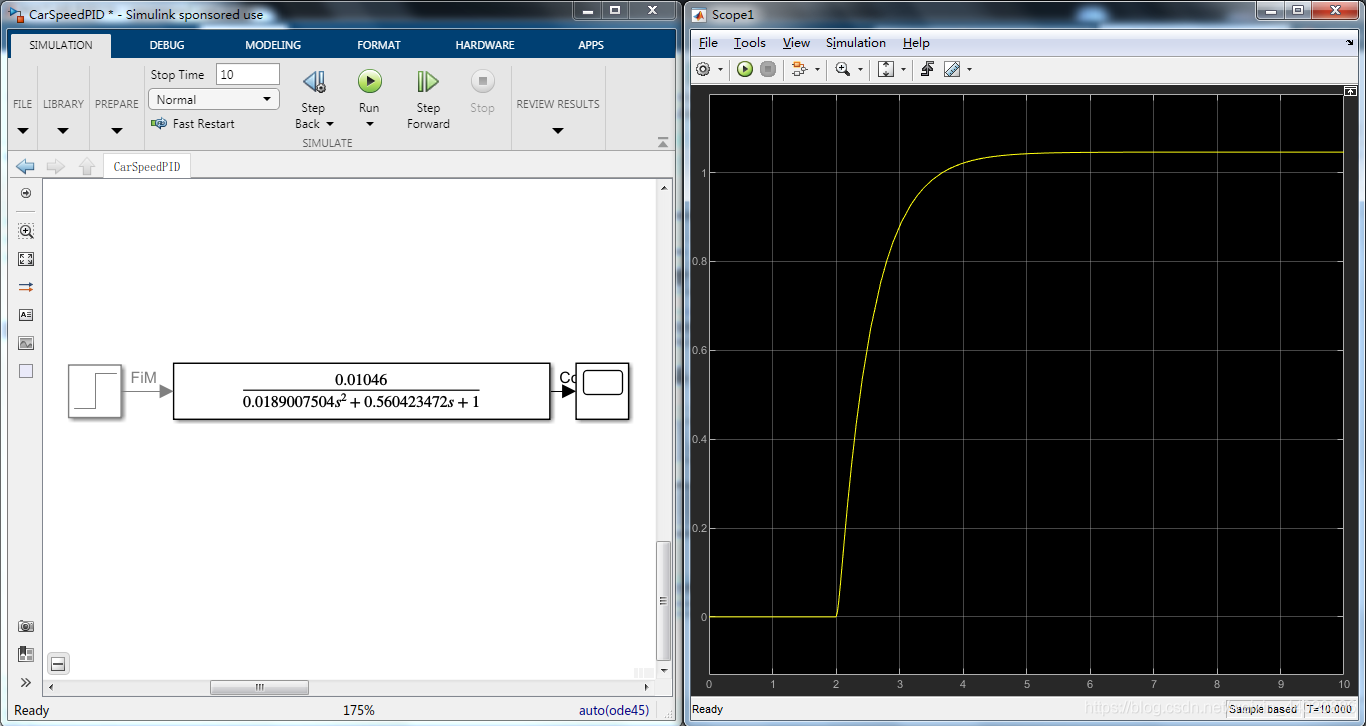
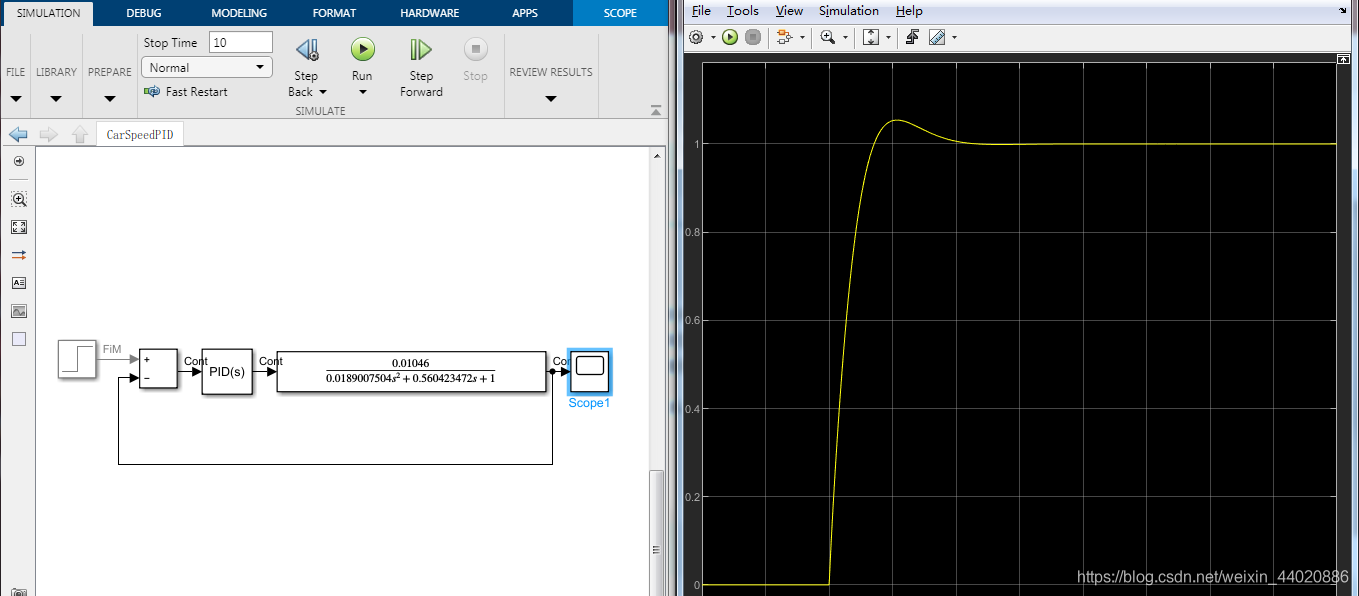
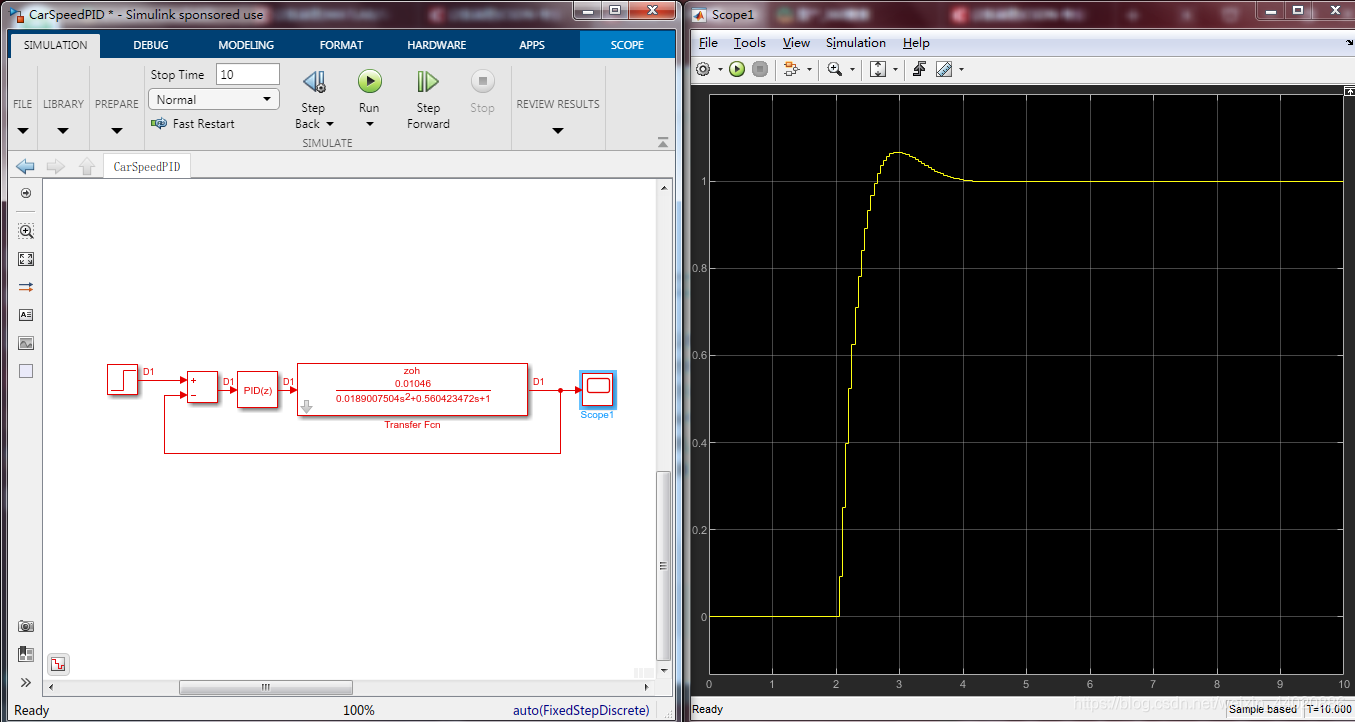
我們得到參數(shù)后即可在Simulink環(huán)境進行仿真環(huán)境的搭建了,將上圖的參數(shù)輸入至Transfer Fcn模塊中。
在進行仿真前,因為進行的是連續(xù)系統(tǒng)仿真,所以將仿真時間改成變步長。 看一下仿真效果和實際輸出基本一致。
因為需要PID控制,那么我們可以添加PID控制器模塊進行模型的搭建,搭建完如下圖所示。
簡單仿真一下,沒有更改PID模塊的任何參數(shù),所以結(jié)果很差。
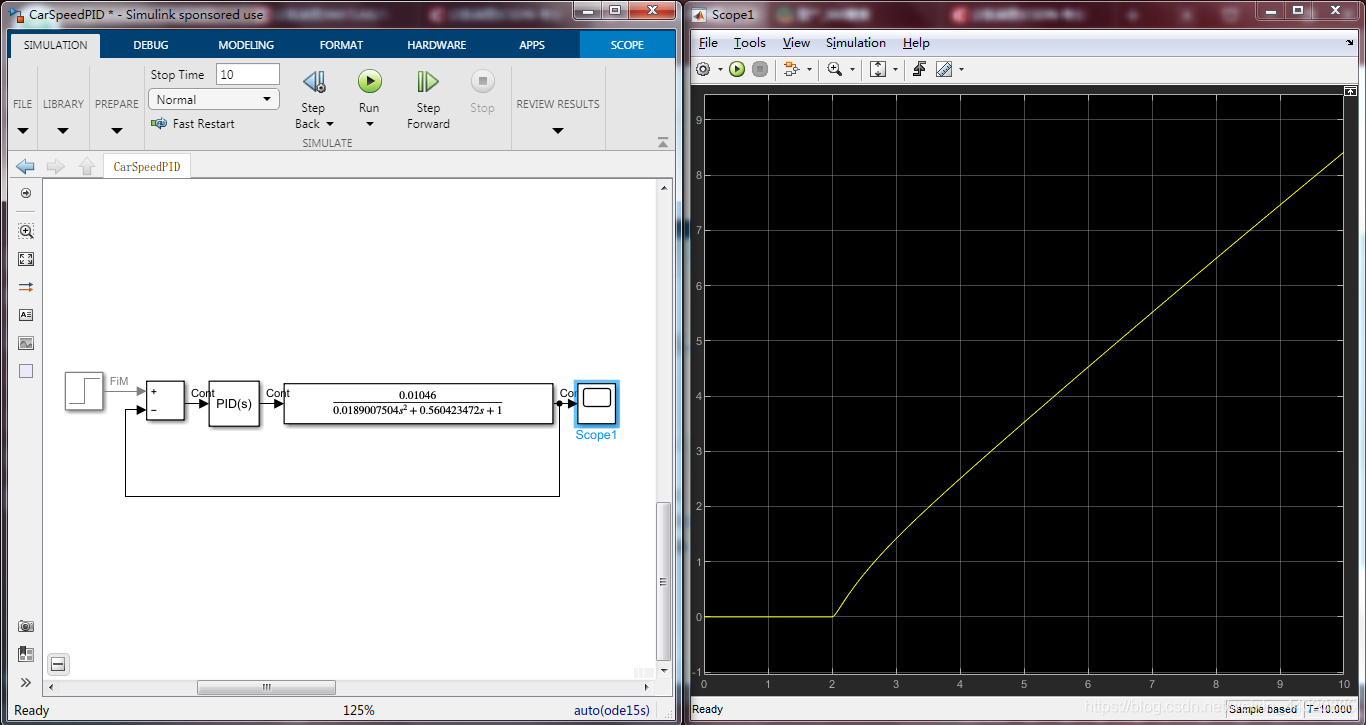
這時我們需要打開PID模塊,點擊Tune按鈕,請求Matlab幫助我們進行自整定!
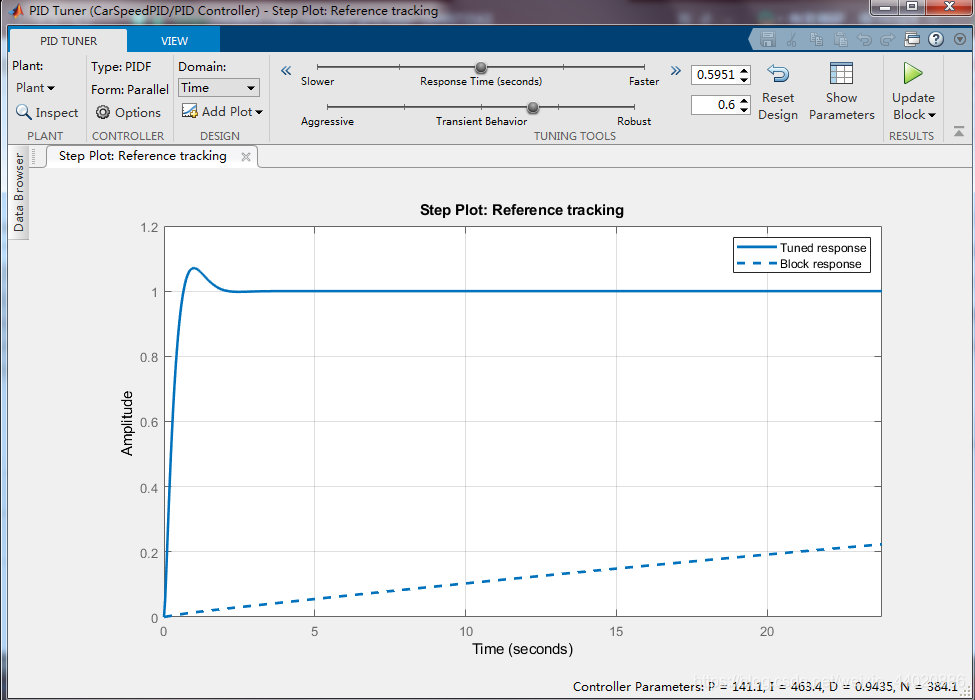
隨后自動打開PID Tune的App。
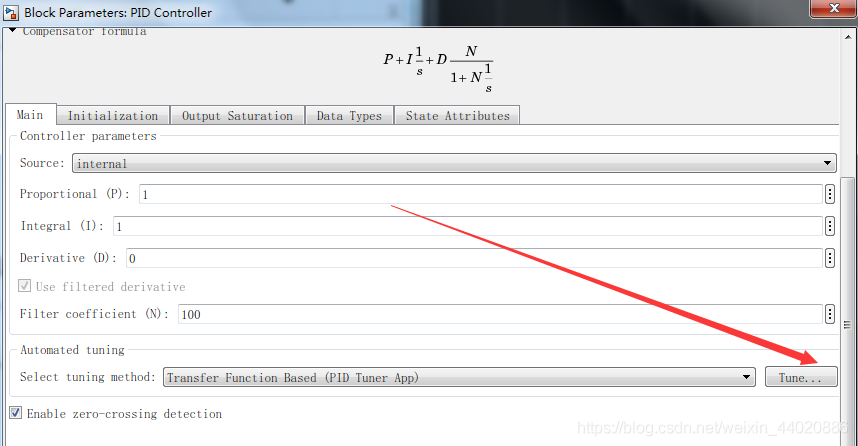
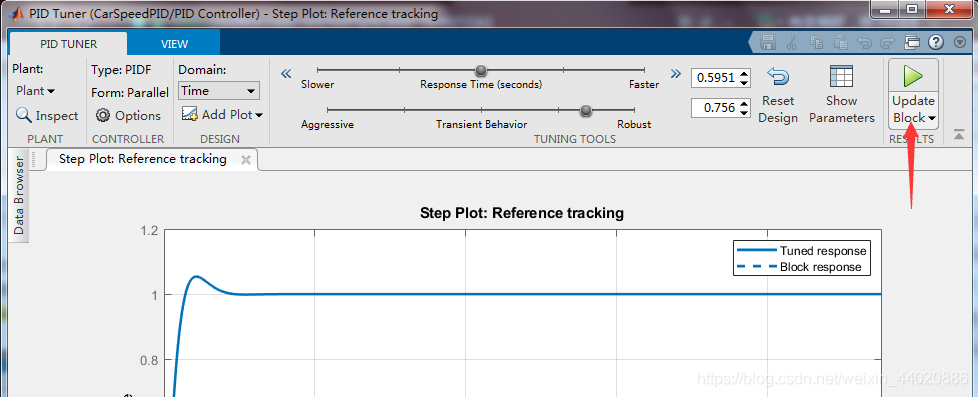
似乎已經(jīng)幫您完成了整定功能,您只需要調(diào)整Robust to Aggressive橫條去看系統(tǒng)的響應(yīng),選擇您喜歡的位置,然后點擊Updata Block參數(shù)會更新至您的控制器。
此時您發(fā)下PID模塊的參數(shù)已經(jīng)被更改了,那么調(diào)整模型,在Step模塊設(shè)置您期望速度,例如我需要小車行駛速度為1m/s。
點擊仿真看看效果。
控制器離散化
是不是借助Maltab/Simulink環(huán)境很簡單就完成了PID的整定了,有同學會問,這有啥用,我需要跑進板子里啊,別急,我們現(xiàn)在研究的是S域,計算機控制器是離散系統(tǒng),我們需要把控制器從S域轉(zhuǎn)換到Z域去。
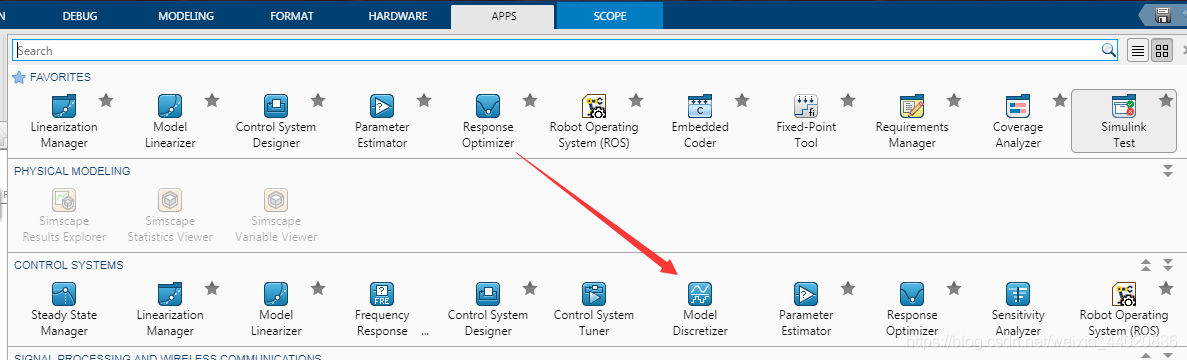
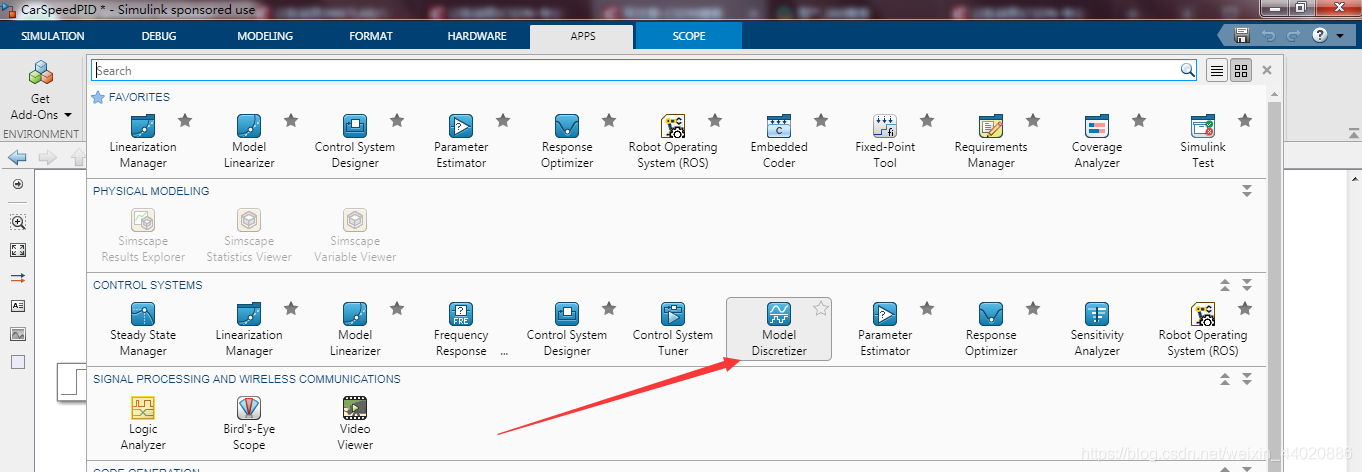
步驟如下圖所示:
2019b用戶如下圖找到該App,2019b之前的用戶在Analysis->Control Design->Model Disretizer找到即可。
您可以選擇0階保持或者1階保持進行離散化,采樣時間我個人設(shè)置0.05s。
然后點擊s->z按鈕,最后Store Setting。
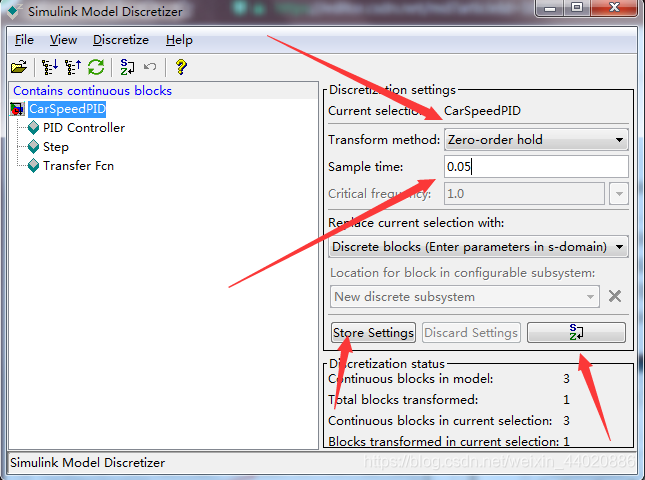
回到模型,您可以看見算法和模型都從S域變成Z域了。
在Solver中將采樣時間改成定步長,采樣時間設(shè)置成0.05,再次進行仿真。
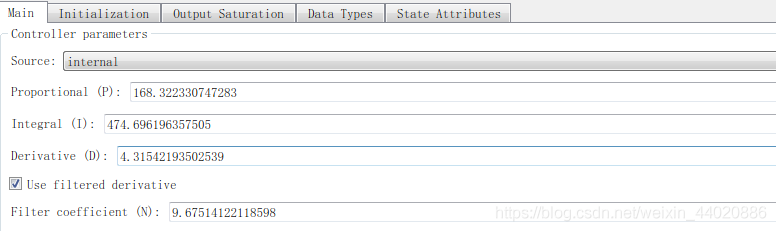
很不幸模型輸出已經(jīng)振蕩! 這時您需要重復(fù)上述步驟再次在PID tune中進行整定。 這里我就不重復(fù)步驟,直接給整定后的仿真效果。
這是最后自整定的PID參數(shù)。
實車效果
仿真效果可以接受,這個時候我們就完成了PID離散控制器的設(shè)計了,接下來就需要刷寫到板子里。
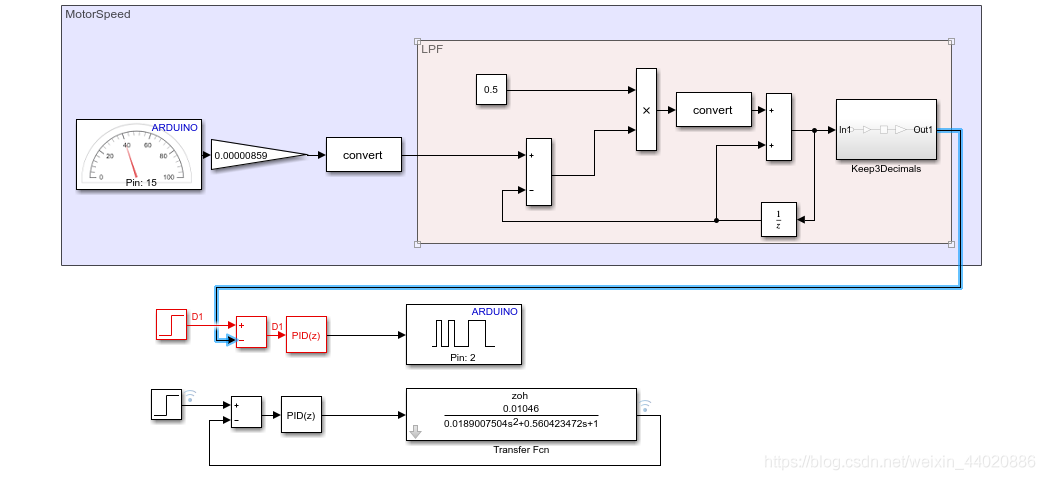
重新改變模型如下圖所示。
替換傳遞函數(shù)模型,也可以進行對比。
將實車速度替換掉傳遞函數(shù)的反饋值。 點擊外部模式仿真,看一下實車效果如何。
經(jīng)過模型自動生成代碼刷寫到控制器后,實車測試和仿真結(jié)果圖有如下對比,在超調(diào)量上有些區(qū)別,但是實際控制器中超調(diào)更小。
最后都趨于平穩(wěn)。 藍色是仿真結(jié)果,紫色是實際控制器效果。
05總結(jié)
仿真可以節(jié)省我們太多時間,如果您使用STM32,S12K進行手工代碼開發(fā),可以通過串口進行數(shù)據(jù)采集導(dǎo)入Excel,然后導(dǎo)入到Matlab進行模型的系統(tǒng)辨識,將PID控制器生成原子子系統(tǒng),進行編寫數(shù)據(jù)字典
管理輸入輸出信號和參數(shù)(非常重要),再使用Embedded Coder生成代碼,在中斷服務(wù)函數(shù)中調(diào)用生成的代碼函數(shù),基于模型設(shè)計的方法可以加快控制器的開發(fā)。
審核編輯:湯梓紅
-
直流電機
+關(guān)注
關(guān)注
36文章
1732瀏覽量
71356 -
PID
+關(guān)注
關(guān)注
37文章
1479瀏覽量
87270 -
Simulink
+關(guān)注
關(guān)注
22文章
539瀏覽量
63595 -
智能小車
+關(guān)注
關(guān)注
87文章
553瀏覽量
82233 -
Arduino
+關(guān)注
關(guān)注
188文章
6489瀏覽量
190029
原文標題:教你10分鐘完成智能小車的PID調(diào)速。
文章出處:【微信號:All_best_xiaolong,微信公眾號:大魚機器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
第13章-循跡功能 STM32智能小車循跡教程 PID循跡算法分析

PWM的調(diào)速原理與應(yīng)用—智能小車調(diào)速
Arduino小車PID調(diào)速
如何對基于STM32的尋跡小車進行PID調(diào)速呢
PWM的調(diào)速原理與應(yīng)用—小車調(diào)速
使用MSP432E401Y單片機設(shè)計智能小車PID調(diào)速功能的代碼免費下載
PID:智能小車入門(位置式和增量式)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論