") 雙級聯(lián)方案的4D成像毫米波雷達(dá)(續(xù)篇)
雙級聯(lián)方案的4D成像毫米波雷達(dá)(續(xù)篇)

本文首發(fā)于公眾號【調(diào)皮連續(xù)波】,其他平臺為自動同步,內(nèi)容若不全或亂碼,請前往公眾號閱讀。保持關(guān)注調(diào)皮哥,和1.5W雷達(dá)er一起學(xué)習(xí)雷達(dá)技術(shù)!
| 序號 | 類別 | 內(nèi)容 | 文件路徑 |
|---|---|---|---|
| 1 | NO | NO | NO |
【正文】
編輯|小助理 審核|調(diào)皮哥
上文雙級聯(lián)方案的4D成像毫米波雷達(dá)沒有列舉完,本期繼續(xù)。
1、傲酷雙芯片4D成像雷達(dá)EAGLE
傲酷采用兩片TI單芯片雷達(dá)AWR1843推出的EAGLE,是低成本、低功耗的雙芯片(6T8R)硬件平臺,可提供傳統(tǒng)雷達(dá)用八芯片級聯(lián)(24T32R)才能達(dá)到的角分辨率。使用低功耗、低成本的DSP而不是FPGA進(jìn)行信號處理可以使得EAGLE的總功耗不到5W,雀食牛皮!
EAGLE是全球最高角分辨率的商用4D成像雷達(dá),可在120°水平 / 30°縱向的寬視場中提供0.5°水平 x 1°縱向的角分辨率,具體參數(shù)如下:
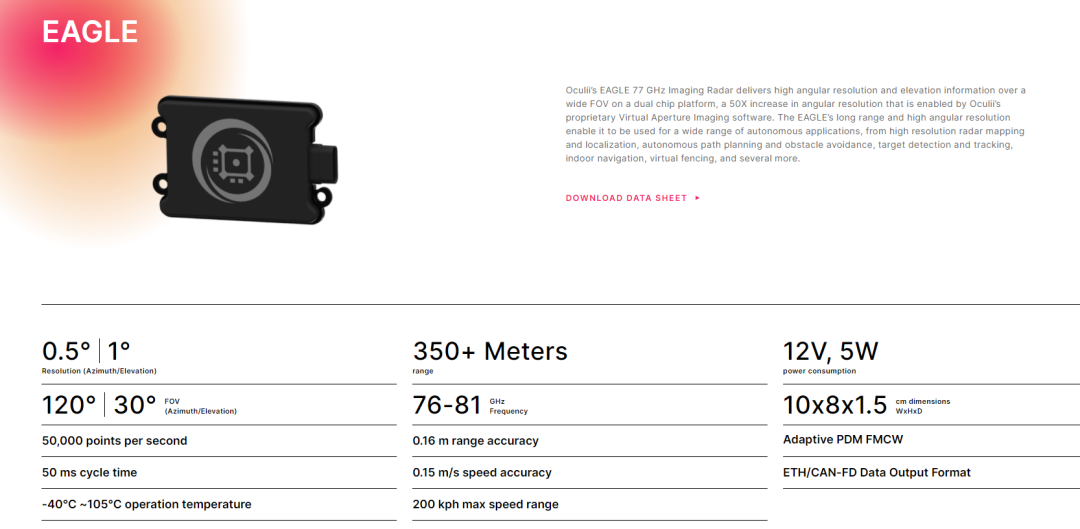
傲酷放棄通過增加天線數(shù)目提高雷達(dá)孔徑的方法,而采用了AI 軟件對發(fā)射波形進(jìn)行時(shí)變的相位調(diào)制,并對接收到的數(shù)值進(jìn)行插值和外推,完全利用軟件來形成更大的虛擬孔徑。
2、福瑞泰克雙芯片級聯(lián)的技術(shù)方案FVR40
2022年底,福瑞泰克4D毫米波雷達(dá)FVR40基本實(shí)現(xiàn)了量產(chǎn)的狀態(tài),預(yù)計(jì)今年第一季度完成上車搭載。
FVR40成像雷達(dá)采用了雙芯片級聯(lián)方案,通過創(chuàng)新的架構(gòu)設(shè)計(jì),包括主芯片、波形設(shè)計(jì)、布陣設(shè)計(jì)、數(shù)據(jù)流和算法框架,以及獨(dú)創(chuàng)的波形和算法設(shè)計(jì),實(shí)現(xiàn)高性能成像效果的同時(shí),極具成本優(yōu)勢。在具體性能方面,F(xiàn)VR40可實(shí)現(xiàn)小于1°的角分辨率和俯仰角分辨率,探測距離超過300米,速度分辨率小于0.1m/s,能夠出色地識別多個目標(biāo)特征。
聽這指標(biāo)確實(shí)厲害,都快要趕上業(yè)界天花板的傲酷了,希望繼續(xù)加油,最好能夠有演示效果的視頻,讓大伙開開眼界,長長見識。
3、納瓦電子NOVA77G-4D-IR雷達(dá)
納瓦電子推出的NOVA77G-4D-IR雷達(dá)采用車規(guī)級芯片實(shí)現(xiàn)了6T8R雙級聯(lián)和12T16R四級聯(lián)架構(gòu),物理通道和虛擬通道相結(jié)合大幅提升雷達(dá)的感知能力,隨著MIMO通道數(shù)量的增多充分利用了空間復(fù)用增益,顯著增強(qiáng)了對物體探測,分離和識別的能力。NOVA77G-4D-IR最遠(yuǎn)探測距離可達(dá)320m,角度分辨率可在1.6°以內(nèi),測距精度0.1m;方位面3dB波束寬度小于1.6°,方位角精度0.1°;俯仰面3dB波束寬度小于2.4°,俯仰角精度0.2°,點(diǎn)云輸出數(shù)量可達(dá)到32000pts/s,性能提升了數(shù)倍,高動態(tài)范圍內(nèi)對行人和車輛的近距離分離能力做了極大的優(yōu)化。
2022年,納瓦電子又宣布了一款6級聯(lián)18T24R、432通道的4D毫米波高精成像雷達(dá),該雷達(dá)采用全新設(shè)計(jì)的HBF(Hybrid Beamforming)混合波束成形結(jié)合DML技術(shù)將一維角分辨率提高到1.5°度以內(nèi),并顯著降低MIMO數(shù)字信號處理的復(fù)雜度,降低運(yùn)算平臺成本。
同時(shí),采用獨(dú)創(chuàng)的稀疏重建算法結(jié)合對應(yīng)的天線陣列設(shè)計(jì),顯著降低4D毫米波成像雷達(dá)的硬件設(shè)計(jì)復(fù)雜度、數(shù)據(jù)量,同時(shí)大幅提升了成像質(zhì)量。具體效果上,納瓦電子推出的4D毫米波成像雷達(dá)可實(shí)現(xiàn)360°的整車環(huán)繞成像效果,
4、華域汽車LRR30雷達(dá)
華域汽車宣布4D毫米波雷達(dá)已完成新一輪架構(gòu)優(yōu)化,測高能力等技術(shù)參數(shù)得到顯著提升,正在部分商用車、乘用車客戶車型上開展4D毫米波雷達(dá)適配、測試工作,研究針對具體場景的解決方案,積極推進(jìn)該類產(chǎn)品的量產(chǎn)落地。
華域汽車此前已經(jīng)規(guī)劃了兩款4D雷達(dá),分別是LRR30和LRR40,其中前者采用了2片MMIC級聯(lián),實(shí)現(xiàn)6發(fā)8收,后者采用了4級聯(lián)設(shè)計(jì),實(shí)現(xiàn)12發(fā)16收。
最后,期待越來越多的4D成像雷達(dá)方案出現(xiàn)!
【本期結(jié)束】
本文是空閑時(shí)個人的心得體會,僅供參考。目前我還有很多內(nèi)容需要學(xué)習(xí),如果還有沒有說到或者不全面的地方,還請指正,感謝大家。
喜歡本文,可以轉(zhuǎn)發(fā)朋友圈。歡迎關(guān)注【調(diào)皮連續(xù)波】和備用號【跳頻連續(xù)波】。
審核編輯黃宇
-
成像
+關(guān)注
關(guān)注
2文章
259瀏覽量
30930 -
4D
+關(guān)注
關(guān)注
0文章
64瀏覽量
11948 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1102瀏覽量
65356
發(fā)布評論請先 登錄
4D毫米波雷達(dá)加速上車,加特蘭微、隔空微和華為放出哪些大招?

多毫米波雷達(dá)的實(shí)車連續(xù)測量應(yīng)用案例
黑芝麻智能視覺與4D毫米波雷達(dá)前融合算法介紹

ADAS和防撞系統(tǒng)中的毫米波雷達(dá)方案

8T8R、250M測距,國產(chǎn)4D毫米波雷達(dá)芯片新突破
毫感科技發(fā)布4D毫米波雷達(dá)芯片MVRA188
毫米波雷達(dá)信號的傳輸特性
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達(dá)數(shù)據(jù)采集、可視化及存儲方案

康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析

什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論