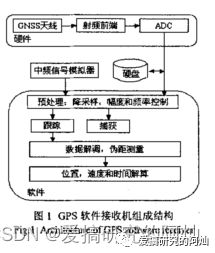
") GPS北斗詳解
GPS北斗詳解
影響捕獲算法的兩個因素:
??1、捕獲的數(shù)據(jù)長度,對于信噪比比較高的信號,捕獲的數(shù)據(jù)長度取1~2ms即可,對于微弱信號增加數(shù)據(jù)長度可以提高捕獲的信噪比,去4~10ms。
??2、多普勒頻移搜索的步長。
??GPS信號采樣頻率不能是PRN碼速率的整數(shù)倍,否則將導(dǎo)致采樣與PRN碼同步,當(dāng)使用兩組時差小于單位采樣時間的采樣點采樣時總會得到相同的采樣數(shù)據(jù)。數(shù)字信號處理過程中得到的PRN碼的起始點初始相位的精確解的精度不會高于單位采樣時間。
??實際中,采樣頻率不能是PRN加上或者減去多普勒頻移所得的頻率值的整數(shù)倍,甚至也不要接近這個頻率值的整數(shù)倍,否則采樣數(shù)據(jù)會比較接近,需要較長的時間的數(shù)據(jù)才能檢測到采樣數(shù)據(jù)的時間差。
??由于C/A碼的周期是1ms,要完成碼的剝離必須搜索到碼相位,所以使用的捕獲數(shù)據(jù)的最小長度是1ms。
??當(dāng)碼相位搜索步長由1個采樣點增加到n個采樣點(1/2個碼元)是,輸出信噪比變化不大,基本不會影響捕獲。但是超過這個值,衛(wèi)星信噪比會嚴(yán)重衰減,從而使捕獲能力減弱。
??頻率步長的選擇范圍是0到單次相關(guān)運算捕獲數(shù)據(jù)長度的倒數(shù),頻率步長增加時,捕獲速度減慢,捕獲精度提高,捕獲能力提高。
??順序搜索算法的捕獲速度隨著N和K的增加或者頻率步長的減小而減慢,捕獲精度取決于開始是碼相位搜索步長和頻率搜索步長的設(shè)置,捕獲能力隨著N和K的增加或者頻率步長的減小而增加。綜合各方面的考慮,當(dāng)取N=1,K=1,頻率步長step=500Hz時可以得到比較理想的捕獲性能。
??基于圓卷積的FFT捕獲算法捕獲速度取決于K值的增加,與順序搜索算法相比要快得多,捕獲的碼相位精度為單位時間的采樣時間間隔,頻率解精度取決于步長設(shè)置,捕獲能力隨著K值的增加和步長減少而增強。
??在捕獲精度方面,順序捕獲算法和FFT頻域搜索算法碼相位精度都可以調(diào)節(jié),但是基于圓卷積的FFT捕獲算法的碼相位搜索步長只能取一個采樣點,在捕獲數(shù)據(jù)長度不變的情況下,順序捕獲算法和基于圓卷積的捕獲算法的頻率搜索步長都能調(diào)節(jié),但是FFT頻域搜索算法只能依靠增加數(shù)據(jù)長度來提高頻率解精度。
??在捕獲能力方面,等捕獲速度相同的條件下,基于圓卷積的FFT捕獲算法可以捕獲更多的衛(wèi)星。
??通過測量本地PRN序列的真實起始點可以獲得精確的時間解,而要想獲得輸入信號中的真實起始點的方法:使用三種信號:即時、超前和滯后信號。本地產(chǎn)生的PRN碼看成是即時碼,在這個基礎(chǔ)上,以固定間隔生成超前和滯后碼。
??擴頻通信的意義:在給定的傳輸速率C下,頻帶寬度W和信噪比P/N是可以相互轉(zhuǎn)化的,即可以通過增加頻帶的方法,在較低的信噪比情況下傳輸信息。擴展頻譜換取要求的信噪比降低,就是擴頻通信的重要特點。
??GPS電文格式:接收電文數(shù)據(jù)為50Hz,每幀數(shù)據(jù)1500bit,分為30s傳送,分成5個子幀,每個子幀300bit,6s傳送,傳送完整的歷書需要25幀,37.5kbit,12.5min,GPS接收機一旦開始工作就必須一次性將歷書接收完整。每個子幀300bit分成10個字,每個字30bit,每個字最后6bit均為奇偶校驗碼。
??C/A碼由兩個十級線性反饋移位寄存器按照不可分解的多項式組合而成。寄存器有共同的1.023MHz的時鐘驅(qū)動,所有寄存器置一個初始狀態(tài),兩個十級移位寄存器分別為G1和G2,其中G2輸出抽頭決定了不同的C/A碼,G1的輸出抽頭固定為第十級寄存器,G1和G2的輸出抽頭進行抑異或,結(jié)果為C/A碼序列。
??在一般的通訊中載波的作用是傳送運輸調(diào)制信號,當(dāng)調(diào)制波到達接收機并解調(diào)出調(diào)制信號后,載波就不再起作用了。但在全球定位系統(tǒng)中,載波除了更好的傳送測距碼和導(dǎo)航電文外,本身也被當(dāng)作一種測距信號來使用。載波相位測量的精度很高,在高精度GPS定位中應(yīng)用相當(dāng)?shù)膹V泛。
??由于m序列的周期性,其自相關(guān)函數(shù)也是一個周期函數(shù)。并且當(dāng)兩個m序列彼此的偏差在一個碼位以內(nèi)時,其相關(guān)函數(shù)值急劇增大,而在一個碼位以外,函數(shù)值很小。
??Gold碼是由兩個長度相同的互相關(guān)系數(shù)極大值為最小的m序列逐位模2加所得到的碼序列。
??用戶位置可以用四顆衛(wèi)星的數(shù)據(jù),采用最小二乘法求解。
??在多普勒頻移測量方面,為了避免出現(xiàn)多普勒計數(shù)的雙值性,用戶接收機不是直接測量接收頻率與發(fā)射頻率之差,而是測量接收頻率與本機基準(zhǔn)頻率之差,求其多普勒計數(shù)值。
??根據(jù)DSP的特點,FPGA使用雙緩沖區(qū)方式,將數(shù)控AGC輸出的16個Zbit數(shù)據(jù)拼成32bit保存在當(dāng)前緩沖區(qū)中并且每個緩沖區(qū)最多保存6000個32bit數(shù)據(jù)。如果填滿當(dāng)前緩沖區(qū),自動切換到下一個緩沖區(qū)、同時向DSP發(fā)出中斷,通知DSP讀取數(shù)據(jù)。
??DSP主要完成的任務(wù):數(shù)字混頻,偽碼相關(guān),捕獲跟蹤。
??解擴通過本地偽碼信號和接收信號相乘實現(xiàn),解擴之后,恢復(fù)出原始的窄帶數(shù)據(jù)信號,同時噪聲、多址干擾等不相關(guān)的信號仍然保持為寬帶信號,經(jīng)過低通濾波器就可將雜質(zhì)信號的大部分濾除。傳統(tǒng)的GPS接收機中,包括了偽碼解擴和數(shù)據(jù)解調(diào)兩個過程,解擴在碼延遲鎖定環(huán)中完成,得到數(shù)據(jù)碼調(diào)制的載波,在用一個Costas環(huán)就可以將載波剝離,最終得到數(shù)據(jù)碼。
??我國北斗二代導(dǎo)航系統(tǒng)的最新發(fā)展:
??打算OS服務(wù)模式的調(diào)制方式修改成如下:
??中心頻率:1575.42MHz,碼速率:1.023MHz,符號速率(導(dǎo)航碼速率):50/100Hz;調(diào)制方式:MBOC(6,1,1/11)。
??關(guān)于MBOC(6,1,1/11):這是從頻域上對MBOC進行了定義,其功率譜密度是數(shù)據(jù)通道信號和導(dǎo)頻信號的聯(lián)合功率譜密度。其功率譜密度表達式為:
??式中1/11指數(shù)據(jù)和導(dǎo)頻通道中BOC(6,1)的功率只和占總功率的1/11。
??北斗系統(tǒng)定時播發(fā)時鐘同步信號,所有北斗終端可輸出北斗系統(tǒng)的精確時間信息,以校對SCADA系統(tǒng)各類設(shè)備的時鐘,保證系統(tǒng)同步。北斗導(dǎo)航系統(tǒng)的主要特點是將精確定位和短電文通信兩項功能結(jié)合在一個系統(tǒng)中。
?? 北斗系統(tǒng)具有定位、短數(shù)據(jù)通信和授時功能。
?? 授時:PNT
??未來全球?qū)Ш叫l(wèi)星系統(tǒng)GNSS包括:北斗/GPS/GLONASS/伽利略。
??北斗導(dǎo)航相對與其他衛(wèi)星導(dǎo)航系統(tǒng)的顯著優(yōu)勢在于可為衛(wèi)星導(dǎo)航用戶提供系統(tǒng)級服務(wù)。例如:針對授時用戶,專門搭載單向和雙向授時信息。 通過授時完成與系統(tǒng)之間的時間和頻率同步,提供100ns(單向)和20ns(雙向)的時間同步精度。
??“北斗一號”系統(tǒng)是雙向的,用戶首先發(fā)射需要定位的信號,通過衛(wèi)星轉(zhuǎn)發(fā)至地面控制中心,地面控制中心解算出位置后再通過衛(wèi)星轉(zhuǎn)發(fā)給用戶,這實際上是既有定位又有通信功能,但是有容量限制。
?? 除了有北斗用戶機之外,還需要到北斗星通公司辦理一定的手續(xù)才能使用北斗系統(tǒng)。
??該系統(tǒng)用戶容量通常每小時僅為540000次。
??北斗一號衛(wèi)星定位系統(tǒng)由兩顆地球靜止衛(wèi)星(80°E和140°E)、一顆在軌備份衛(wèi)星(110.5°E)、中心控制系統(tǒng)、標(biāo)校系統(tǒng)和各類用戶機等部分組成。
?? 北斗一號的覆蓋范圍是北緯555°,東經(jīng)70140°之間的心臟地區(qū),上大下小,最寬處在北緯35°左右,其定位精度為水平精度100米,設(shè)立標(biāo)校站之后為20米,公共頻率2491.75MHz。
??定位原理:以2顆衛(wèi)星的已知坐標(biāo)為圓心,各以測定的本星至用戶機距離為半徑,形成2個球面,用戶機必然位于這2個球面交線的圓弧上。電子高程地圖提供的是一個地心為球心,一球心至地球表面高度為半徑的非均勻球面。求解圓弧線與地球表面交點即可獲得用戶位置。
??衛(wèi)星導(dǎo)航應(yīng)用產(chǎn)業(yè),已成為世界八大無線產(chǎn)業(yè)之一,也是全球信息產(chǎn)業(yè)中發(fā)展最快的產(chǎn)業(yè)。
??北斗系統(tǒng)是雙星有源定位,可以全天候、全天時提供區(qū)域衛(wèi)星導(dǎo)航信息的導(dǎo)航系統(tǒng)。
??衛(wèi)星并不發(fā)射導(dǎo)航電文,也不配備高精度的原子鐘,只是用于在地面中心站與用戶之間進行雙向信號中繼。
??用戶終端為僅帶有定向天線的收發(fā)器,用于接收中心站通過衛(wèi)星轉(zhuǎn)發(fā)來的信號和向中心站發(fā)射通信請求,不含定位解算處理器,設(shè)備相對比較簡單。
?? 終端可以分為定位通信型(基本型用戶機)、通信型、授時型和管理型(指揮型)用戶機。
??用戶還可以進行精密授時,地面中心站將發(fā)送標(biāo)準(zhǔn)時間和衛(wèi)星的位置信息。用戶進行單向授時時,接收此信號與本地時鐘進行比對,計算出差值,然后調(diào)整本地時鐘與標(biāo)準(zhǔn)時間對齊,單向授時精度為100ns;進行雙向授時時,就將對比結(jié)果經(jīng)衛(wèi)星裝發(fā)回地面中心,由地面中心計算出本地時鐘和標(biāo)準(zhǔn)時間的差值,再經(jīng)兩顆衛(wèi)星之一轉(zhuǎn)發(fā)給用戶,用戶按此事件調(diào)整本地時鐘與標(biāo)準(zhǔn)時間信號對齊,雙授時精度為20ns。
??北斗用戶容量取決于衛(wèi)星的可用頻帶寬度、信號的調(diào)制和編碼方式以及地面中心站的運算速度,用戶容量是有限的。還取決于用戶允許的信道阻塞率、詢問信號速率和用戶的響應(yīng)頻率。赤道地區(qū)的精度比較低。極高緯度因不能有效覆蓋而無法使用。
??北斗導(dǎo)航系統(tǒng)具有用戶與用戶、用戶與地面控制中心之間雙向數(shù)字報文通信能力,一般一次可以傳輸36個漢字,進核準(zhǔn)的用戶利用連續(xù)傳輸方式可以傳輸120個漢字。
??北斗導(dǎo)航系統(tǒng)是主動式雙向測距二維導(dǎo)航。
??北斗系統(tǒng)的缺陷:一是用戶定位的同時失去了無線電隱蔽性,在軍事上不利;二是設(shè)備必須包含發(fā)射機,在體積、重量、價格和功耗方面處于不利的地位。
??北斗導(dǎo)航定位系統(tǒng)是由太空的導(dǎo)航通信衛(wèi)星、地面控制中心和客戶端三部分組成。
??客戶端是直接由用戶使用的設(shè)備,主要用于接收地面控制中心經(jīng)衛(wèi)星轉(zhuǎn)發(fā)的測距信號。
??北斗系統(tǒng)采用它采用碼分多址(CI)htA)制式,抗干擾性能大大優(yōu)于現(xiàn)有的衛(wèi)星導(dǎo)航系統(tǒng)。
??由于是同步衛(wèi)星,相對于終端來說,下行波束的角度很窄,也就是說,運動的地面終端必須不斷調(diào)整天線的指向,在車船上,是靠一整套的穩(wěn)定裝置,對于高速運動的設(shè)備,這是幾乎做不到的。
??工作頻段:中心站至衛(wèi)星C波段,上行6 GHz,下行4 GH;用戶機至衛(wèi)星,上行為L波段1 610MHz一1626.5MHz,下行為S波段,24 83.5MHz一25 00M Hz.傳輸速率:上行12.62 5kbps,下行31.25kbps。用戶機對衛(wèi)星的可工作仰角范圍:10°一75°。
??GPS傳輸?shù)闹行念l率是1.176GHz、1.227GHz和1.575GHz。
??格魯那斯傳輸?shù)闹行念l率是1.192GHz、1.278GHz和1.575GHz。
??北斗調(diào)制的方式為QPSK和BPSK。
??GPS獲得時間同步的方式為:使衛(wèi)星和接收機同步以使之在完全相同的時間內(nèi)產(chǎn)生相同的碼字。然后我們所要做的就是從衛(wèi)星接收碼字,在回頭看看在多久之前我們的接收機生成了相同的碼,時間差就是信號抵達我們的時間。
??北斗二代的中心頻率大致為:1561 MHz (E2), 1589 MHz (E1),1268 MHz (E6), and 1207 MHz (E5b)。
??北斗二代的使用的碼型極有可能是Gold碼。
??北斗二號是中程軌道衛(wèi)星,軌道高度大約為21550千米。
??PRN:偽隨機噪聲(pseudorandom noise)
??power spectral density:功率普密度(PSD)
??residual carrier phase:殘余載波相位
??北斗二號的碼元周期為1ms。
審核編輯黃宇
-
gps
+關(guān)注
關(guān)注
22文章
2955瀏覽量
168448 -
信號
+關(guān)注
關(guān)注
11文章
2841瀏覽量
77867 -
北斗
+關(guān)注
關(guān)注
3文章
666瀏覽量
36623
發(fā)布評論請先 登錄
安徽京準(zhǔn):GPS北斗衛(wèi)星授時器助力DCS系統(tǒng)升級改造
GPS北斗定位模塊問題及解決辦法
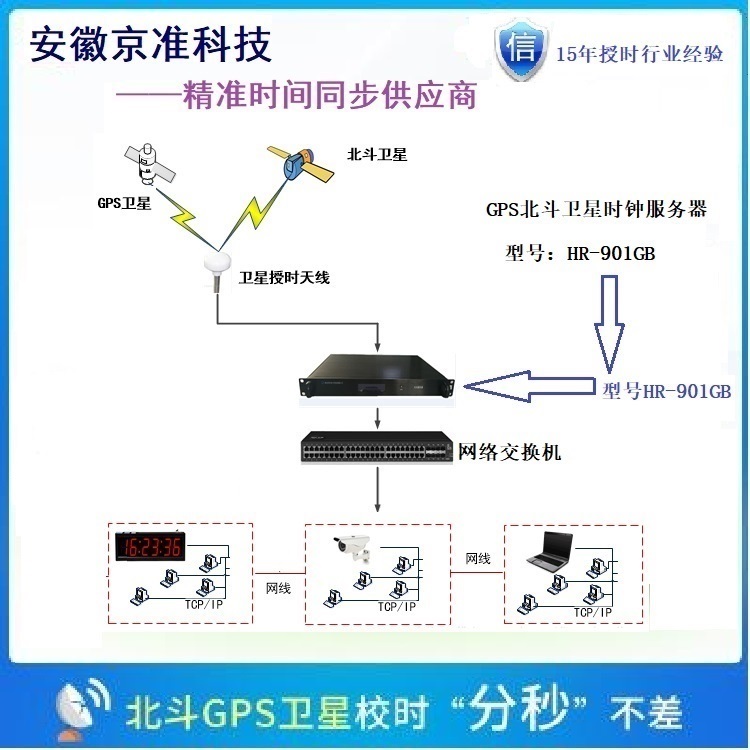
安徽京準(zhǔn)GPS北斗時鐘服務(wù)器的應(yīng)用及分析

京準(zhǔn)電鐘:GPS北斗衛(wèi)星對時服務(wù)器應(yīng)用教育行業(yè)

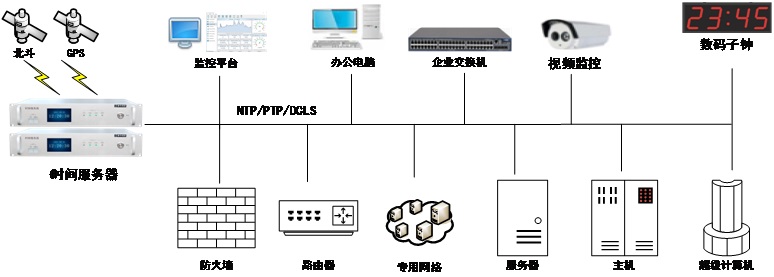
京準(zhǔn)電鐘:GPS北斗時間服務(wù)器的作用與應(yīng)用

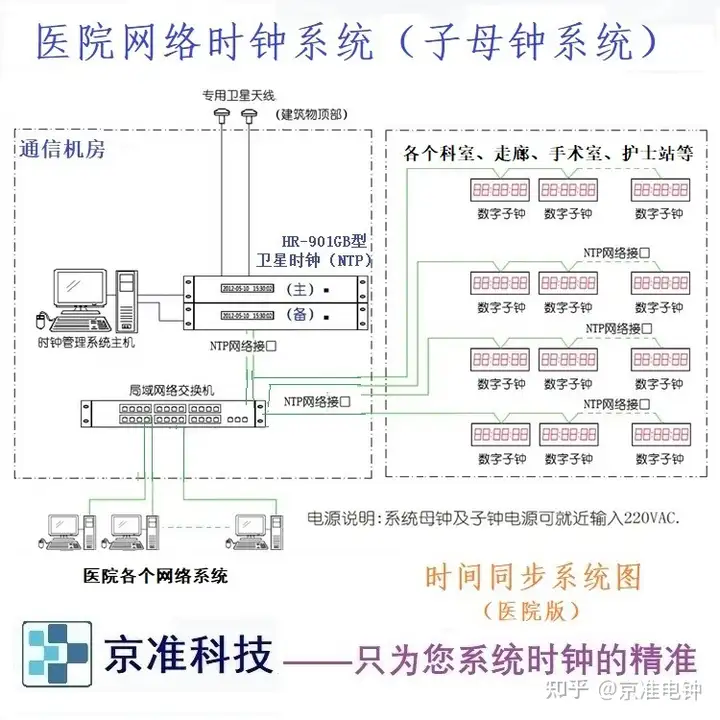
京準(zhǔn)電鐘:醫(yī)院網(wǎng)絡(luò)GPS北斗子母鐘系統(tǒng)建設(shè)方案
京準(zhǔn)電鐘:GPS北斗時間同步系統(tǒng)在五大行業(yè)揭秘

京準(zhǔn)電鐘:北斗授時器 GPS校時器 應(yīng)用視頻監(jiān)控系統(tǒng)

京準(zhǔn)電鐘:GPS北斗衛(wèi)星校時服務(wù)器助力區(qū)塊鏈數(shù)據(jù)網(wǎng)
京準(zhǔn)電子:GPS北斗衛(wèi)星時鐘同步系統(tǒng)助力精準(zhǔn)教育
京準(zhǔn)電鐘,GPS北斗衛(wèi)星授時服務(wù)器助力智慧水利系統(tǒng)
同步時鐘:北斗/GPS衛(wèi)星、電信基站、NTP以太網(wǎng)校時方式的區(qū)別

京準(zhǔn)電鐘:GPS北斗高精度時統(tǒng)同步系統(tǒng)具體參數(shù)是什么?

NTP電子時鐘系統(tǒng):GPS北斗衛(wèi)星授時服務(wù)下的生活重塑






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論