") 車載以太網(wǎng)驅(qū)動在AUTOSAR層級中所扮演的重要作用
車載以太網(wǎng)驅(qū)動在AUTOSAR層級中所扮演的重要作用
正文
正如前文《車載以太網(wǎng)基礎篇之EthIf》所述,Eth Driver將作為配置以太網(wǎng)的底層驅(qū)動,不僅能夠被EthIf來進行調(diào)用,同時能夠滿足Eth收發(fā)器驅(qū)動的調(diào)用需求,因為有必要深入了解下車載以太網(wǎng)驅(qū)動(Eth Driver)在整個AUTOSAR層級中所扮演的重要作用。
如下圖1所示,Ethernet If模塊不僅會直接控制Ethernet Driver,如果存在Ethernet Switch驅(qū)動或者Ethernet Transiver驅(qū)動時,那么就會間接控制Ethernet Driver模塊,總而言之,以太網(wǎng)驅(qū)動不僅能夠完成以太網(wǎng)數(shù)據(jù)的正常收發(fā),同時也能夠?qū)崿F(xiàn)針對以太網(wǎng)網(wǎng)關或者以太網(wǎng)收發(fā)器的直接配置。
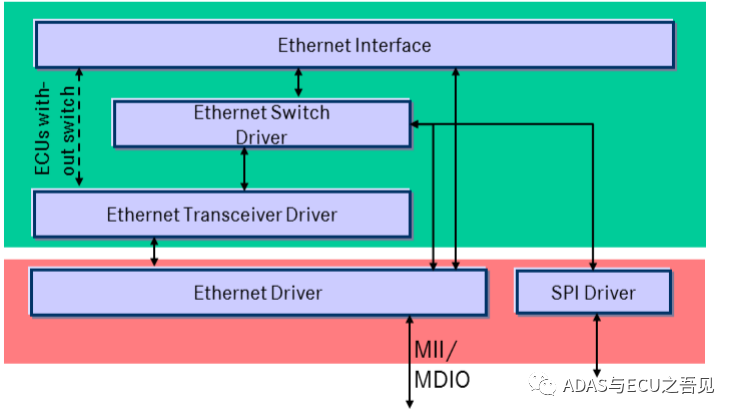
圖1 Ethernet Driver與其他以太網(wǎng)驅(qū)動關系
AUTOSAR層次關系
按照AUTOSAR標準文檔規(guī)范,有關Eth Driver模塊在整個AUTOSAR軟件架構的具體位置描述如下圖2所示:
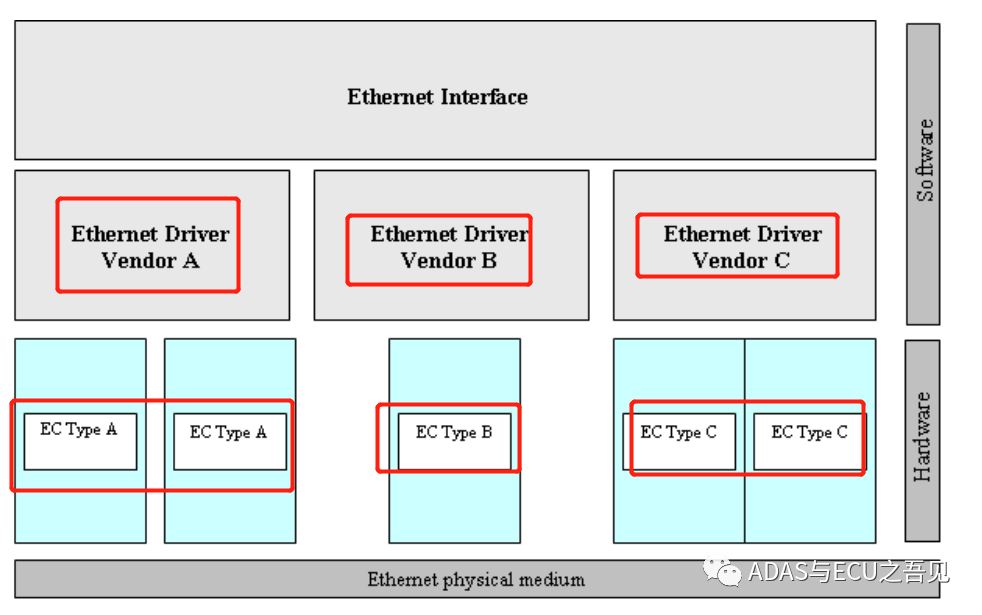
圖2 Eth Driver與以太網(wǎng)協(xié)議棧關系
如上圖所示,可以得出如下幾個基本結論:
一個以太網(wǎng)協(xié)議棧中可以存在多家供應商的以太網(wǎng)控制器,同時針對每家供應商的控制器進行單獨控制,互不影響;
同一供應商的以太網(wǎng)控制器可以存在多個,但使用的以太網(wǎng)控制器驅(qū)動可以僅使用同一套;
上述三家不同供應商的以太網(wǎng)驅(qū)動作為標準AUTOSAR MCAL的一部分,能夠完全實現(xiàn)與底層硬件的解耦;
模塊主體功能
Eth Driver作為車載以太網(wǎng)協(xié)議棧最為重要的底層構件,小T將帶領大家從以下幾個層面初步了解認識以太網(wǎng)驅(qū)動:
以太網(wǎng)各個不同驅(qū)動內(nèi)部的索引關系如何設定?
以太網(wǎng)驅(qū)動如何進行數(shù)據(jù)發(fā)送;
以太網(wǎng)驅(qū)動如何進行數(shù)據(jù)接收;
以太網(wǎng)驅(qū)動特性如QoS,硬件時間戳,Offloading都具備什么功能?
在以太網(wǎng)驅(qū)動常見的通信協(xié)議如MDIO,DMA如何在驅(qū)動中發(fā)揮作用?
驅(qū)動索引規(guī)則
如下圖3所示,每個以太網(wǎng)驅(qū)動彼此都是獨立的,同時其索引編號是從0開始,但是每個驅(qū)動內(nèi)部的bufidx均可以從0開始,彼此之間互不干擾。
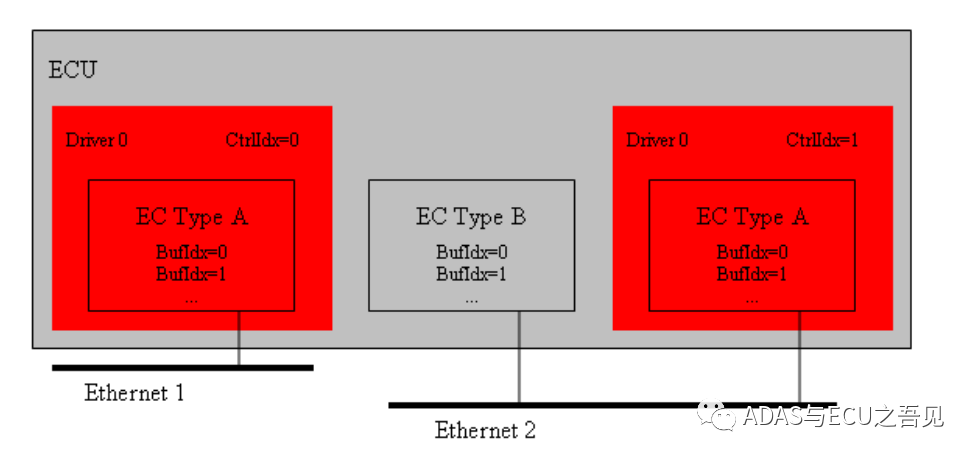
圖3 Eth Driver索引關系
數(shù)據(jù)發(fā)送過程
上層應用如果需要通過Eth Driver將數(shù)據(jù)發(fā)送出去,那么就需要通過EthIf模塊間接調(diào)用Eth Driver的發(fā)送函數(shù)Eth_Transmit來完成數(shù)據(jù)的發(fā)送。
其中EthIf模塊的數(shù)據(jù)發(fā)送功能分為兩者模式,一種是Polling模式,另外一種就是Interrupt模式,一般而言都優(yōu)先采用中斷模式來滿足系統(tǒng)實時性要求。
如下圖4為Polling模式,在Polling模式中可以看到在EthIf_MainfunctionTx函數(shù)中會去輪詢是否發(fā)送成功的標志,這個也是Polling模式的典型特征。
Polling模式
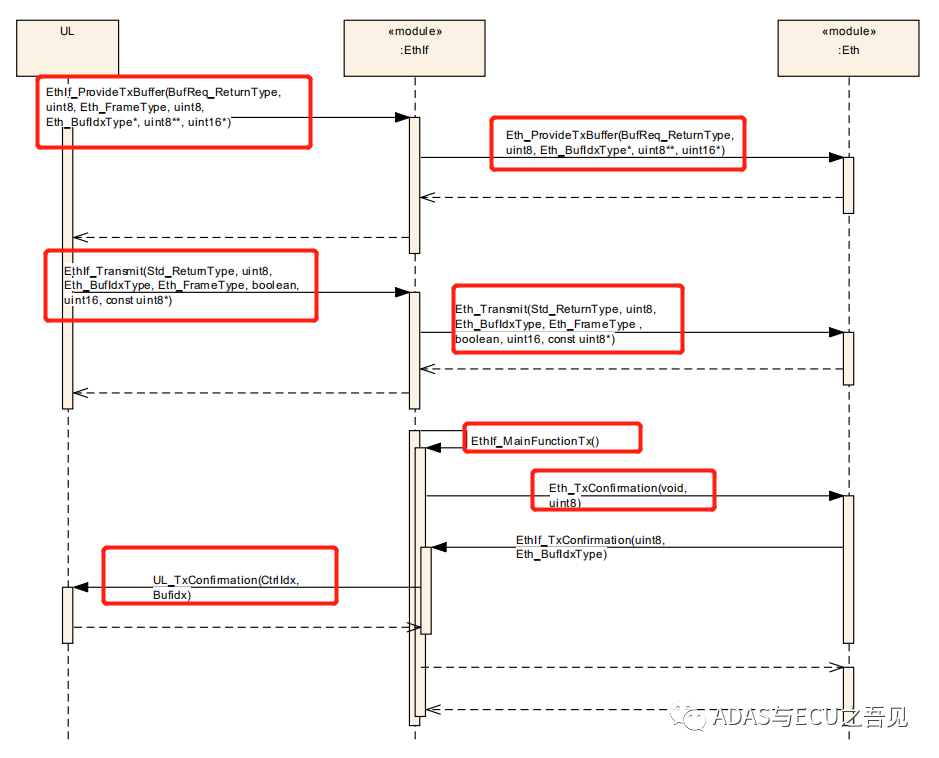
圖4 數(shù)據(jù)發(fā)送Polling模式
Interrupt模式
如下圖5所示為以太網(wǎng)數(shù)據(jù)發(fā)送的中斷模式,中斷模式相比Polling模式可以看出并沒有使用到EthIf_MainfunctionTx函數(shù),而是使用Eth模塊的中斷函數(shù)來確認發(fā)送是否成功。
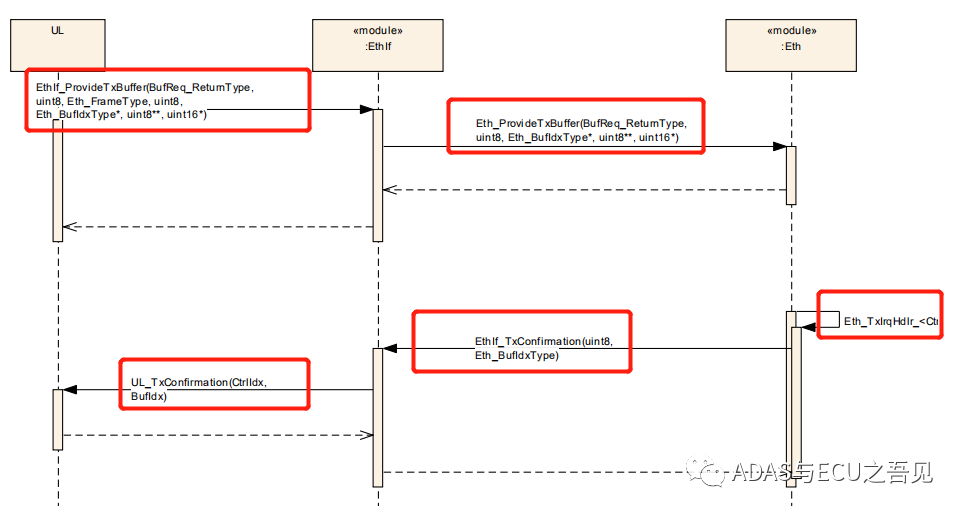
圖5 數(shù)據(jù)發(fā)送中斷模式
數(shù)據(jù)接收功能
同理相比數(shù)據(jù)發(fā)送功能,EthIf模塊的數(shù)據(jù)接收功能也可以分為Polling模式與中斷模式兩種,如下圖9所示為EthIf模塊的數(shù)據(jù)接收Polling模式。
如下圖6所示,如果EthIf模塊數(shù)據(jù)接收采用Polling模式,那么就需要使用到EthIf_MainfunctionRx函數(shù),在該函數(shù)中去調(diào)用EthIf_RxIndication來告知上層數(shù)據(jù)已成功被接收,使用該模式會大大降低數(shù)據(jù)接收效率,一般接收優(yōu)先采用中斷模式。
Polling模式
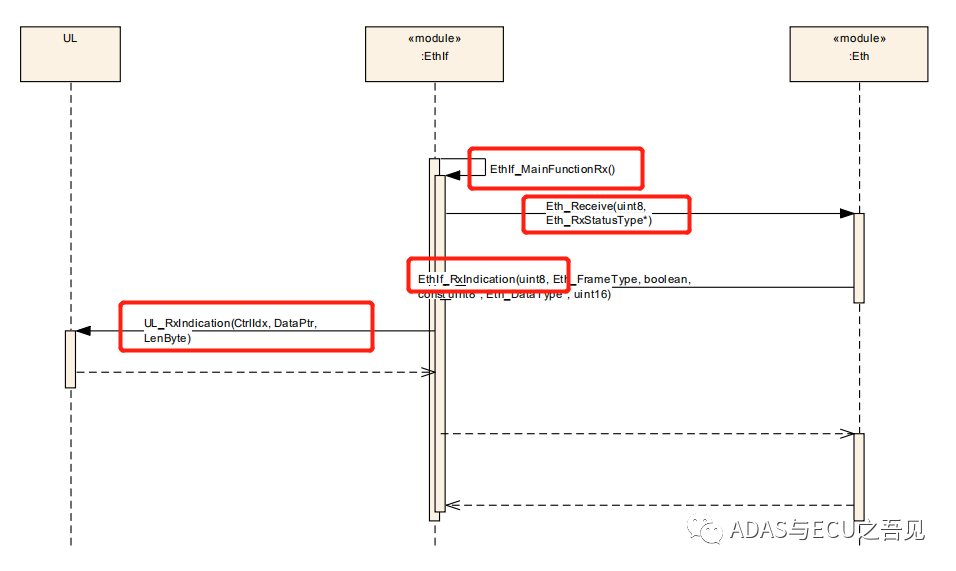
圖6 數(shù)據(jù)接收Polling模式
Interrupt模式
如下圖7所示為EthIf模塊的數(shù)據(jù)接收中斷功能,在該模式中可以看到通過Eth模塊通過中斷函數(shù)來進而告知上層數(shù)據(jù)已被接收。
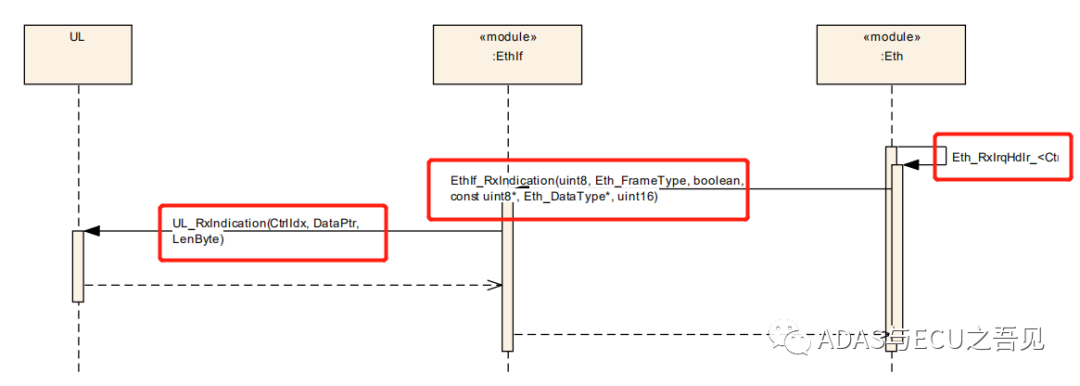
圖7 數(shù)據(jù)接收中斷模式
驅(qū)動特性簡介
以太網(wǎng)驅(qū)動相比其他驅(qū)動而言,存在很多諸多獨有的特性,小T將會帶領大家來了解這些特性,爭取對這些特性有個基本的認識,以便我們對以太網(wǎng)驅(qū)動有個較為全面的了解,應用它時也會更加得心應手。
以下列舉了以太網(wǎng)驅(qū)動(網(wǎng)卡)常見的三種特性:Offloading 特性,硬件TimeStamp特性,QoS特性。
Offloading特性
“Offload"顧名思義表示卸載的意思,那么給誰卸載以及卸載什么呢?其實該特性存在的目的就是為了給CPU卸載,卸載的方式如將CRC計算交給硬件來做,或者分包組包的動作也放在硬件中來處理,從而減小這部分在以太網(wǎng)協(xié)議棧中的占用時間,降低軟件運行延遲造成的性能不足以及CPU loading過高等問題。
在AUTOSAR規(guī)范中針對以太網(wǎng)驅(qū)動(Eth Driver)發(fā)送或者接收報文的CRC進行了Offloading的特別說明如下:
對于IPV4幀,如果EthCtrlEnableOffloadChecksumIPv4設置成TRUE,那么就可以Offloading CRC;
對于ICMP幀,如果 EthCtrlEnableOffloadChecksumICMP設置成TRUE,那么就可以Offloading CRC;
對于TCP幀,如果 EthCtrlEnableOffloadChecksumTCP 設置成TRUE,那么就可以Offloading CRC;
對于UDP幀,如果 EthCtrlEnableOffloadChecksumUDP設置成TRUE,那么就可以Offloading CRC;
值得注意的是這些CRC計算都僅會在硬件中完成,對于接收方而言,CRC校驗檢測會通過硬件來完成,如果CRC校驗不通過,那么就會丟棄該接收到的幀。
硬件TimeStamp特性
如之前文章《AUTOSAR基礎篇之CanTsyn》與《AUTOSAR基礎篇之StbM》所述,大家相比CAN時間同步有了一個基本的認識與了解,與CAN時間同步對比,以太網(wǎng)時間同步協(xié)議采用的IEEE1588或者IEEE802.1AS的PTP(Precise Time Protocal)協(xié)議,該協(xié)議需要確認使用的網(wǎng)卡(MAC)是否本身支持。
該協(xié)議使用到通過底層硬件MAC來打上對應的以太網(wǎng)報文收發(fā)的時間戳,能夠最大限度地降低軟件時間戳所帶來的不確定性,將時間同步精度能夠做到微秒甚至是納微秒級別。
AUTOSAR規(guī)范中定義的EthTsync模塊使用的是雙步端延時PTP時間同步協(xié)議,如下為基于該協(xié)議的Time Master與Time Slave兩者之間的交互關系,后期也會針對EthTsync模塊進行單一講解,敬請關注。
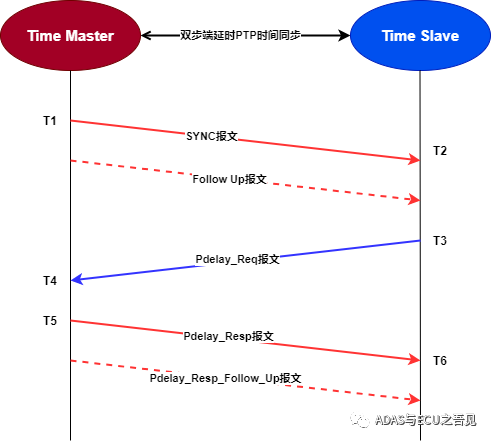
圖8 雙步以太網(wǎng)端延時機制PTP時間同步協(xié)議
如上圖8所示,如果是基于單步模式下的以太網(wǎng)端延時機制的PTP時間同步,那么虛線標注的部分則不會有,如果是基于雙步模式下的以太網(wǎng)端延時機制的PTP時間同步,那么虛線標注的部分必須要有。
值得注意的是在IEEE802.1AS存在一個GrandMaster概念,需要通過BMCA(Best Master Clock Algorithm)來實現(xiàn),不過由于汽車內(nèi)部屬于靜態(tài)網(wǎng)絡,因此只會存在唯一的GrandMaster,無需使用到BMCA動態(tài)分配確認算法。
以太網(wǎng)硬件實現(xiàn)PTP協(xié)議有如下兩種方式:
以太網(wǎng)MAC控制器支持PTP協(xié)議,常見雙步模式;
有些TI的PHY層也可以支持PTP,不過一般是單步模式,如果使用AUTOSAR標準的EthTsync模塊,要提前確認是否支持雙步模式;
QoS特性
Qos是IEEE 802.1P協(xié)議,該協(xié)議運行在以太網(wǎng)第二層,用來保證在以太網(wǎng)數(shù)據(jù)轉(zhuǎn)發(fā)擁堵時通過優(yōu)先級方式來保證重要的數(shù)據(jù)包能夠及時發(fā)送出去。
普通的以太網(wǎng)二層報文是不包含優(yōu)先級字段的,IEEE802.1P是IEEE802.1Q(VLAN標簽技術)標準的擴充技術,彼此之間協(xié)同工作。
802.1Q雖然定義了標簽字段,但是并沒有定義與使用優(yōu)先級,而使用802.1P協(xié)議補充之后便可以正常使用優(yōu)先級,正如IEEE 802.1P與IEEE802.1Q兩者協(xié)同定義的標簽字段如下圖9所示:
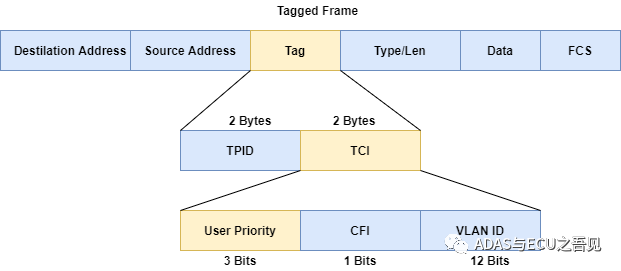
圖9 IEEE802.1Q標簽頭信息
以太網(wǎng)幀通過QoS特性來通過802.1Q標簽中的802.1P用戶優(yōu)先級(COS)來進行標記,其優(yōu)先級具備8級,從優(yōu)先級0至優(yōu)先級7,如下圖10所示:

圖10 COS優(yōu)先級說明
通訊協(xié)議介紹
在使用車載以太網(wǎng)驅(qū)動的過程中,我們經(jīng)常性會碰到如下三種常見的通訊協(xié)議,這三種通訊協(xié)議對于車載以太網(wǎng)正常工作,非常重要:
MII接口通訊協(xié)議,用于以太網(wǎng)MAC層與物理層收發(fā)器PHY之間的數(shù)據(jù)傳輸協(xié)議;
MDIO通訊協(xié)議,用于以太網(wǎng)MAC層控制PHY的狀態(tài)設置與獲取協(xié)議;
DMA通訊協(xié)議,用于以太網(wǎng)MAC層與CPU之間的數(shù)據(jù)搬運通訊協(xié)議,提高數(shù)據(jù)搬運效率,降低CPU負載;
MII接口通訊協(xié)議基礎介紹
MII接口是IEEE802.3定義的以太網(wǎng)行業(yè)標準,該標準就是為了解決,以太網(wǎng)MAC層與PHY之間的兼容性,保證即使更換了不同類型的MAC,PHY始終能夠正常工作。
MII接口隨著技術的發(fā)展與進步,目前已經(jīng)衍生出了多種增強型MII接口,常用的就有MII,RMII,SMII,SSMII,SSSMII,GMII,RGMII,SGMII ,其中對于車載以太網(wǎng)最為常用的還是RGMII接口。
具體的通訊協(xié)議介紹不在本文中進行展開,該接口的選擇只要軟件上MCAL配置使用對應的MII接口類型,其余都是硬件行為,硬件上保證接口正常連接即可,如下圖11所示,介紹了MII接口在以太網(wǎng)硬件連接上的所處關系:
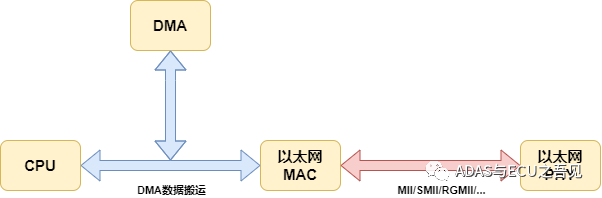
圖11 以太網(wǎng)MAC與PHY之間的MII物理連接示意圖
MDIO協(xié)議基礎介紹
首先,MDIO是Management Data Input/Output的縮寫,且該接口協(xié)議在IEEE802.3中也有所體現(xiàn),是一種專門用于管理MAC與PHY之間的串口數(shù)據(jù)接口,基本功能如下:
讀取PHY相關寄存器的值;
獲取PHY的Link及其他工作狀態(tài)等;
設置對應PHY的工作模式等;
除此之外,MDIO協(xié)議接口是一種實時,半雙工,串行的數(shù)據(jù)接口,由兩個線組成,一個被稱為MDIO線,另外一根則是MDC線。
MDIO線負責數(shù)據(jù)的傳輸,MAC與PHY之間可以雙向傳輸,寫寄存器時由MAC驅(qū)動,讀寄存器由PHY驅(qū)動,先傳高位(MSB),再傳低位(LSB),且該Pin腳需要上拉1.5kΩ-10kΩ范圍內(nèi)的電阻。
MDC線負責傳遞時鐘同步信號,只能單向通過MAC驅(qū)動,且只能在MDC上升沿對MDIO線上的數(shù)據(jù)進行采樣,該MDC允許最大的時間頻率一般都通過PHY決定。
一個MDIO接口可支持32個PHY地址,該接口有32個寄存器地址,其中前16個寄存器已經(jīng)在標準中定義,其余16個則有各個器件廠商自行定義。
根據(jù)IEEE802.3協(xié)議中將MDIO協(xié)議分為兩種幀格式,分別為Clause 22與Clause 45,其中Clause 22主要用于千兆以下的以太網(wǎng)PHY,而Clause 45則用于千兆以上的以太網(wǎng)PHY。
接下來就針對Clause 22與Clause 45兩者協(xié)議的基本使用與區(qū)別做個簡要說明:
Clause 22讀數(shù)據(jù)幀格式如下:

圖12 Clause 22 讀數(shù)據(jù)幀格式
Clause 22寫數(shù)據(jù)幀格式如下:

圖13 Clause 22 寫數(shù)據(jù)幀格式
Clause 45 地址幀格式如下:

圖14 Clause 45 地址幀格式
Clause 45 讀數(shù)據(jù)幀格式如下:

圖15 Clause 45 讀數(shù)據(jù)幀格式
Clause 45 寫數(shù)據(jù)幀格式如下:

圖16 Clause 45 寫數(shù)據(jù)幀格式
如下圖17,小T根據(jù)上述Clause 22與Clause 45的幀格式定義,列舉了兩者之間的幀格式的定義說明以及區(qū)別聯(lián)系,這樣便于大家對兩者格式的使用有個基本認識。
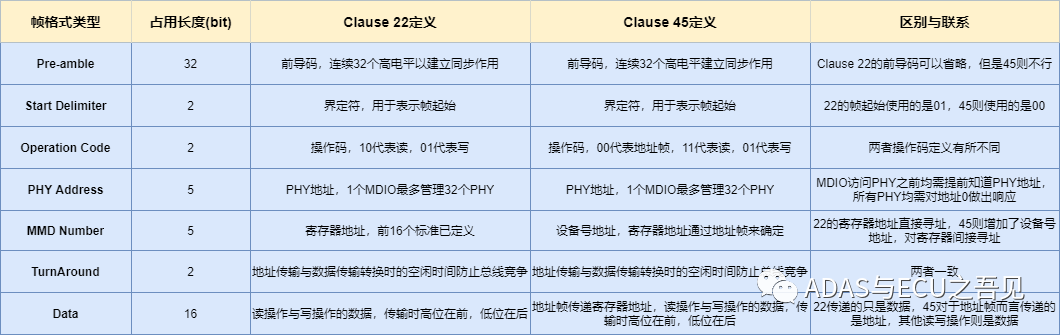
圖17 Clause 22與Clause 45幀格式區(qū)別與聯(lián)系
DMA協(xié)議基礎介紹
DMA協(xié)議對于使用過它的朋友而言,特別是做底層驅(qū)動開發(fā)的朋友應該不會陌生,DMA就是為了在不需要CPU干預的前提下來實現(xiàn)外設與內(nèi)存之間的搬運或者內(nèi)存與內(nèi)存之間的搬運,那么以太網(wǎng)DMA也是如此,就是為了實現(xiàn)以太網(wǎng)外設與內(nèi)存之間的數(shù)據(jù)交換。
本文不會對DMA協(xié)議本身做過多的解釋說明,旨在說明DMA在以太網(wǎng)數(shù)據(jù)收發(fā)過程中如何起作用,通過如下的兩張圖來了解認識DMA在以太網(wǎng)數(shù)據(jù)收發(fā)過程中的用途。
以太網(wǎng)DMA發(fā)送
如下圖18所示,Tx ringbuffer作為DMA描述符,DMA在以太網(wǎng)發(fā)送過程中的作用表現(xiàn):
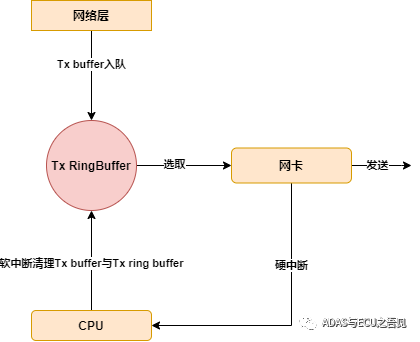
圖18 以太網(wǎng)DMA發(fā)送過程
以太網(wǎng)DMA接收
如下圖19所示,Tx Ringbuffer作為DMA描述符,DMA在以太網(wǎng)接收過程中的作用表現(xiàn):
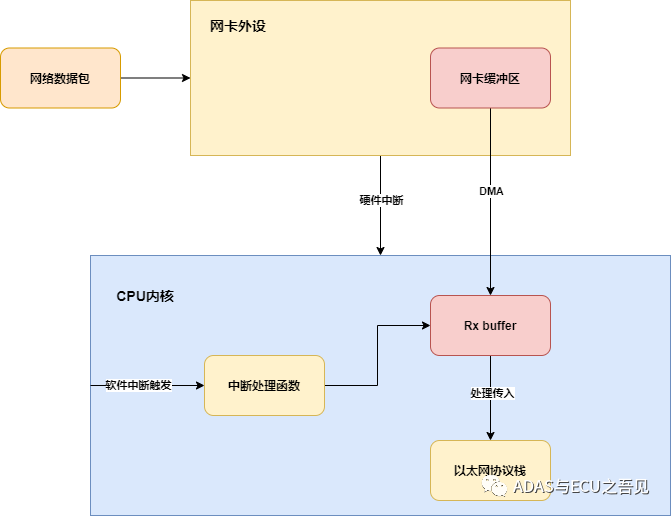
圖18 以太網(wǎng)DMA接收過程
常用函數(shù)總結
為了便于大家更好地使用Eth Driver這個模塊,小T整理了關于車載以太網(wǎng)驅(qū)動這部分常用的函數(shù)接口與功能說明,如下圖19所示:
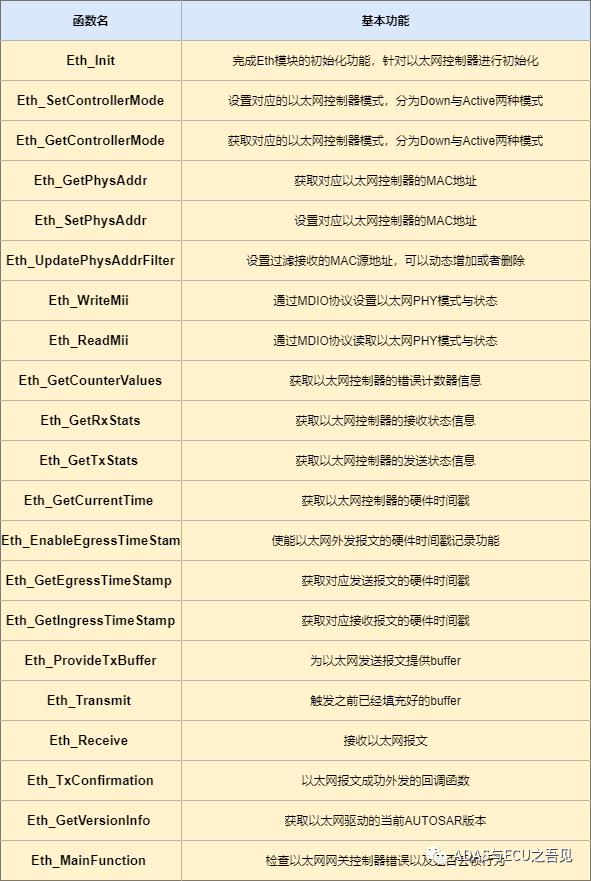
圖19 以太網(wǎng)驅(qū)動常用函數(shù)接口
審核編輯:劉清
-
收發(fā)器
+關注
關注
10文章
3658瀏覽量
107404 -
控制器
+關注
關注
114文章
16973瀏覽量
182945 -
AUTOSAR
+關注
關注
10文章
372瀏覽量
22407 -
車載以太網(wǎng)
+關注
關注
18文章
240瀏覽量
23422
原文標題:車載以太網(wǎng)基礎篇之Ethernet Driver
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄

【直播預告】第三代CAN總線CANXL介紹,預約有禮喔#CANXL #車載以太網(wǎng)
阻性負載的重要作用
TOSUN 車載以太網(wǎng)仿真測試解決方案


車載以太網(wǎng)EMC解決方案
以太網(wǎng)幀格式和功能詳解
以太網(wǎng)幀結構是怎樣的
車載以太網(wǎng)線束傳輸性能——汽車線束故障定位實際測試結果分析#車載以太網(wǎng)
CAN FD和車載以太網(wǎng)在自動駕駛領域中的實際應用
新品發(fā)布 | 多通道車載以太網(wǎng)仿真測試工具
車載以太網(wǎng)與傳統(tǒng)以太網(wǎng)的區(qū)別
車載以太網(wǎng)的優(yōu)勢和應用
車載以太網(wǎng)性能優(yōu)化方案


CANape&VN5620監(jiān)控記錄以太網(wǎng)數(shù)據(jù)操作演示#車載以太網(wǎng) #CANape






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論