") 焊接機器人系統(tǒng)構(gòu)成及焊接時的注意事項
焊接機器人系統(tǒng)構(gòu)成及焊接時的注意事項
焊接機器人最早只在點焊中得到應(yīng)用,80年初,隨著計算機技術(shù)、傳感器技術(shù)的發(fā)展,弧焊機器人逐漸得到普及,特別是近十幾年來由于世界范圍內(nèi)經(jīng)濟的高速發(fā)展,市場的激烈競爭使那些用于中、大批量生產(chǎn)的焊接自動化專機已不能適應(yīng)小規(guī)模、多品種的生產(chǎn)模式逐漸被具有柔性的焊接機器人代替,焊接機器人得到了巨大的發(fā)展,焊接已成為工業(yè)機器人應(yīng)用最大的領(lǐng)域之一,焊接機器人在汽車、摩托車、工程機械等領(lǐng)域都得到了廣泛的應(yīng)用。目前世界擁有的80余萬臺工業(yè)機器人中,用于焊接的機器人可達(dá)40%以上。
機器人焊接時的主要注意事項
1.必須進(jìn)行示教作業(yè)
在機器人進(jìn)行自動焊接前,操作人員必須示教機器人焊槍的軌跡和設(shè)定焊接條件等。
由于必須示教,所以機器人不面向多品種少量生產(chǎn)的產(chǎn)品焊接。
2.必須確保工件的精度
機器人沒有眼睛,只能重復(fù)相同的動作。
機器人軌跡精度為±0.1mm,以此精度重復(fù)相同的動作。
焊接偏差大于焊絲半徑時,有可能焊接不好,所以工件精度應(yīng)保持在焊絲半徑之內(nèi)。
3.焊接條件的設(shè)定取決于示教作業(yè)人員的技術(shù)水平
操作人員進(jìn)行示教時必須輸入焊接程序,焊槍姿態(tài)和角度,電流、電壓、速度等焊接條件。
示教操作人員必須充分掌握焊接知識和焊接技巧。
4.必須充分注意安全
機器人是一種高速的運動設(shè)備,在其進(jìn)行自動運行時絕對不允許人靠近機器人(必須設(shè)置安全護(hù)欄)。
操作人員必須接受勞動安全方面的專門教育,否則不準(zhǔn)操作。
弧焊機器人的性能要求
在弧焊作業(yè)中,要求焊槍跟蹤工件焊道運動,并不斷填充金屬形成焊縫,因此運動過程中速度的穩(wěn)定性和軌道精度是兩項重要的指標(biāo)。
一般情況下,焊接速度可取5~50mm/s,軌道精度可取±0·2~0·5mm。由于焊槍的姿態(tài)對焊縫質(zhì)量也有一定的影響,因此希望在根蹤焊道的同時,焊槍姿態(tài)的可調(diào)范圍盡量大,還有其它一些性能要求,如擺動功能、焊接傳感器(起始點檢測、焊縫跟蹤)的接口功能、焊槍防碰功能等。
焊接規(guī)范的設(shè)定。起弧、收弧參數(shù)。
擺動功能。擺動頻率、擺幅、擺動類型的設(shè)定。
焊接傳感器。起始點檢測、焊縫跟蹤傳感器的接口功能。
焊槍防碰功能。當(dāng)焊槍受到不正常的阻力時,機器人停機,避免操作者和工具受到損壞。
多層焊功能。應(yīng)用該功能可以在第一層焊接示教完成后,實現(xiàn)其余各層的自動編程。
再引弧功能。引弧失敗后,自動重試。因此消除了焊接異常(引弧失敗)發(fā)生時引起的作業(yè)中斷,最大限度避免了因此而引起的全線停車。
焊槍校正功能。焊槍與工件發(fā)生碰撞時,可通過簡單操作進(jìn)行校正。
粘絲自動解除功能。焊接終了時如果檢測出焊絲粘絲,則自動再通電解除粘絲,因此不必手工剪斷焊絲。
斷弧再啟動功能。出現(xiàn)斷弧時,機器人會按照指定的搭接量返回重新引弧焊接。因此無須補焊作業(yè)。
點焊機器人的性能要求
對于點焊機器人運動速度是一個重要指標(biāo),要求能夠快速完成小節(jié)距的多點定位(例如每0.3-0.4秒移動30-50mm節(jié)距后定位);為確保焊接質(zhì)量,定位精度要求較高(一般為±0·25mm);并具有較大的持重(50~100Kg),以便攜帶內(nèi)裝變壓器的焊鉗。
焊接機器人的主要性能指標(biāo)
名稱與型號:Motoman-L10
主要用途:弧焊
類別:示教再現(xiàn)型
坐標(biāo)型式:多關(guān)節(jié)式
自由度數(shù):5個
抓重:最大10㎏(包括夾鉗)
動作范圍與速度運動參數(shù)列表如下:
Motoman-L10運動參數(shù)
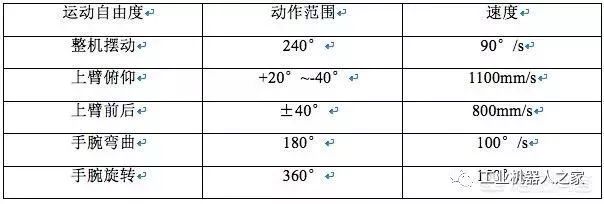
(遮住的數(shù)字是150)
定位方式:選用增量編碼器作為位置檢測元件
控制方式:重復(fù)式數(shù)字位置控制方式,可精確控制運動軌跡
重復(fù)定位精度:±0.2mm
驅(qū)動方式:電伺服采用交流測速發(fā)電機作為伺服電動機的速度檢測元件,實現(xiàn)速度反饋,并引進(jìn)力矩反饋
驅(qū)動源:DC伺服電動機
程序控制和存儲方式:采用8位微處理Intel8080用半導(dǎo)體存儲器作為主存(盒式磁帶補充主存容量之不足)
程序步數(shù):1000步
指令條數(shù):600條
重量:本體400㎏控制部分350㎏
外部同步信號:輸入22點輸出21點
電源:AC220/220V(+10%,-15%),50/60HZ±1HZ,三相5KVA
焊接機器人的系統(tǒng)構(gòu)成
完整的焊接機器人系統(tǒng)一般有如下幾部分組成:機器人操作機、變位機、控制器、焊接系統(tǒng)(專用焊接電源、焊槍和焊鉗等)、焊接傳感器、中央控制計算機和相應(yīng)的安全設(shè)備等。
根據(jù)用途,將工業(yè)機器人配置不同的焊接系統(tǒng),將組成不同的焊接機器人系統(tǒng)。
弧焊機器人
弧焊機器人在通用機械、金屬結(jié)構(gòu)等許多行業(yè)中得到廣泛運用。弧焊機器人是包括電弧焊附屬裝置在內(nèi)的柔性焊接系統(tǒng),而性能有特殊的要求。在弧焊作業(yè)中,焊槍應(yīng)跟蹤工件的焊道運動,并不斷填充金屬形成焊縫。因此運動過程中的速度穩(wěn)定性和軌跡精度是兩項重要指標(biāo)。一般情況下,焊接速度約為5~50㎜/s,軌跡精度約為±(0.2~0.5)㎜。由于焊槍的姿態(tài)對焊縫質(zhì)量有一定的影響,因此希望在跟蹤焊道的同時,焊槍姿態(tài)的可調(diào)范圍盡量大,其一些基本性能要求如下所示:
設(shè)定焊接條件(電流、電壓、速度等);
擺動功能;
坡口填充功能;
焊接異常功能檢測;
焊接傳感器(起始點檢測、焊道跟蹤)的接口功能。
點焊機器人
汽車工業(yè)是點焊機器人系統(tǒng)一個典型的應(yīng)用領(lǐng)域。最初,點焊機器人只用于增強焊作業(yè)(往已拼接好的工件上增加焊點),后來為了保證拼接精度,又讓機器人完成定位焊作業(yè)性能,具體來說有:
安裝面積小,工作空間大;
快速完成小節(jié)距的多點定位(例如每0.3~0.4s移動30~50㎜節(jié)距后定位);
定位精度高(±0.25㎜),以確保焊接質(zhì)量;
持重大(50~100㎏),以便攜帶內(nèi)裝變壓器的焊鉗;
內(nèi)存容量大,示教簡單,節(jié)省工時;
點焊速度已生產(chǎn)線相匹配,同時按全可靠性好。

焊接機器人系統(tǒng)原理圖
焊接機器人的示教編程
用機器人代替人進(jìn)行作業(yè)時,必須預(yù)先對機器人發(fā)出指令,規(guī)定機器人應(yīng)該完成的動作和作業(yè)的具體內(nèi)容,這個指示過程稱之為對機器人的示教(teaching),或者稱之為對機器人的編程(programming)。對機器人的示教內(nèi)容通常存儲在機器人的控制裝置內(nèi),通過存儲內(nèi)容的再現(xiàn)(playback),機器人就能實現(xiàn)人們所要求的動作和要求人們賦予的作業(yè)內(nèi)容。
示教內(nèi)容主要由兩部分組成,一是機器人運動軌跡的示教,二是機器人作業(yè)條件的示教。機器人運動軌跡的示教主要是對為了完成某一作業(yè),焊絲端部所要運動的軌跡,包括運動類型和運動速度的示教。機器人作業(yè)條件的示教主要是為了獲得好的焊接質(zhì)量,對焊接條件進(jìn)行示教,包括被焊金屬的材質(zhì)、板厚、對應(yīng)焊縫形狀的焊槍姿勢、焊接參數(shù)、焊接電源的控制方法等。
-
傳感器技術(shù)
+關(guān)注
關(guān)注
51文章
349瀏覽量
98703 -
計算機技術(shù)
+關(guān)注
關(guān)注
1文章
104瀏覽量
13488 -
焊接機器人
+關(guān)注
關(guān)注
16文章
330瀏覽量
15221
發(fā)布評論請先 登錄
焊接傳感器一款轉(zhuǎn)為焊接機器人而設(shè)計的焊縫跟蹤傳感器
焊接機器人的結(jié)構(gòu)與原理
工業(yè)焊接機器人實訓(xùn)平臺介紹
焊接機器人及其應(yīng)用
焊接機器人及系統(tǒng)介紹(焊接機器人系統(tǒng)組成和編程方法及發(fā)展趨勢)
焊接機器人的焊接參數(shù)有什么影響
銅線焊接機使用注意事項
自動焊接機器人能解決傳統(tǒng)焊接哪些問題
焊接機器人的分類介紹
如何檢驗焊接機器人焊接質(zhì)量?
焊接機器人的操作流程和操作注意事項是什么?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論