") 結(jié)構(gòu)光自標(biāo)定方法綜述
結(jié)構(gòu)光自標(biāo)定方法綜述
00 引言
三維重構(gòu)是計(jì)算機(jī)視覺核心問題之一,相機(jī)-投影儀結(jié)構(gòu)光系統(tǒng)是三維重構(gòu)體系中一個(gè)重要分支,結(jié)構(gòu)光系統(tǒng)標(biāo)定是其眾多應(yīng)用的基礎(chǔ),在某些場景下是其不可或缺的部分。根據(jù)標(biāo)定物不同,標(biāo)定方法可以粗略地分為基于標(biāo)定物的傳統(tǒng)標(biāo)定方法和基于場景約束的自標(biāo)定方法,傳統(tǒng)標(biāo)定方法繁雜且無法在線標(biāo)定,但精度高;自標(biāo)定方法操作簡單,可以滿足一些特殊應(yīng)用場景,但模型復(fù)雜且精度、魯棒性較差。自標(biāo)定方法是對傳統(tǒng)標(biāo)定方法的補(bǔ)充,結(jié)構(gòu)光系統(tǒng)的自標(biāo)定是在相機(jī)自標(biāo)定基礎(chǔ)上延伸而來,其目的是為了補(bǔ)充傳統(tǒng)標(biāo)定方法存在的缺陷,也是為了簡化操作流程。
相機(jī)標(biāo)定和自標(biāo)定綜述文獻(xiàn)較多,結(jié)構(gòu)光系統(tǒng)標(biāo)定綜述較少。從各類數(shù)據(jù)庫中檢索到的文獻(xiàn)有劉建偉等人對線結(jié)構(gòu)光系統(tǒng)標(biāo)定技術(shù)的研究,Zhang S 介紹了傳統(tǒng)編碼方法、非傳統(tǒng)編碼方法以及混合編碼方法,給出了部分編碼規(guī)則原理,并提供了一些實(shí)用技巧。王子為提出了一種基于單應(yīng)矩陣的攝像機(jī)自動標(biāo)定算法,通過對攝像機(jī)內(nèi)外參數(shù)進(jìn)行標(biāo)定。范劍英等人。 提出了一種通過一塊圓點(diǎn)平面標(biāo)定板進(jìn)行標(biāo)定,再利用自標(biāo)定算法標(biāo)定外參。劉順濤等人研究了基于矩陣變換的攝影測量法、基于幾何關(guān)系的三角測量法、多項(xiàng)式擬合法3種標(biāo)定方法,并將3 種方法的五大具體標(biāo)定特性進(jìn)行了對比分析。任瑜、韓正勇等人從其他方面對相機(jī)和攝像機(jī)的參數(shù)標(biāo)定進(jìn)行了一些研究。
綜上所述,國內(nèi)外學(xué)者對結(jié)構(gòu)光標(biāo)定方法進(jìn)行了一些研究和綜述,但結(jié)構(gòu)光自標(biāo)定方法綜述在國內(nèi)外尚未被檢索到。本文針對當(dāng)前結(jié)構(gòu)光自標(biāo)定方法進(jìn)行系統(tǒng)綜述,對不同自標(biāo)定方法進(jìn)行分類歸納,就結(jié)構(gòu)光完全自標(biāo)定重點(diǎn)論述,且對系統(tǒng)重構(gòu)效果進(jìn)行比對;提出結(jié)構(gòu)光自標(biāo)定方法。存在的問題與挑戰(zhàn);指出結(jié)構(gòu)光自標(biāo)定的可能解決方案及未來發(fā)展方向。
01 結(jié)構(gòu)光自標(biāo)定理論基礎(chǔ)
相機(jī)-投影儀結(jié)構(gòu)光系統(tǒng)自標(biāo)定是涵蓋相機(jī)標(biāo)定、投影儀標(biāo)定、相機(jī)-投影儀系統(tǒng)標(biāo)定等科研領(lǐng)域的難點(diǎn)問題,其理論基礎(chǔ)主要包括結(jié)構(gòu)光三維重構(gòu)系統(tǒng),相機(jī)-投影儀標(biāo)定以及多視角幾何中的對極幾何等。
1.1 結(jié)構(gòu)光三維重構(gòu)
相機(jī)-投影儀結(jié)構(gòu)光系統(tǒng)一般由數(shù)量不等的相機(jī)和投影儀組成,投影儀將格雷碼、正弦條紋等主動結(jié)構(gòu)信息投射到被測物體表面,再利用單個(gè)或多個(gè)相機(jī)捕獲帶有結(jié)構(gòu)光冬案的被測物表面,再經(jīng)過圖像三維解析實(shí)現(xiàn)三維重建。結(jié)構(gòu)光三維重構(gòu)流程包括相機(jī)-投影儀標(biāo)定、編碼、投影編碼圖案到被測物體、相機(jī)捕獲帶有編碼圖案的物體表面、解碼、三維重構(gòu)。結(jié)構(gòu)光三維重構(gòu)示意如圖1。

圖1 結(jié)構(gòu)光三維重構(gòu)示意
1.2 相機(jī)-投影儀標(biāo)定
相機(jī)-投影儀自標(biāo)定本質(zhì)上屬于標(biāo)定問題,標(biāo)定參數(shù)與傳統(tǒng)相機(jī)和投影儀基本一致。在相機(jī)-投影結(jié)構(gòu)光系統(tǒng)中,投影儀往往被看作一個(gè)逆相機(jī),因此其需要標(biāo)定的參數(shù)與相機(jī)基本相同。相機(jī)標(biāo)定可以分為線性標(biāo)定和非線性標(biāo)定,非線性標(biāo)定除需要正常線性標(biāo)定外,還需要標(biāo)定相機(jī)畸變參數(shù)。相機(jī)-投影儀標(biāo)定示意如圖2所示。

圖2 相機(jī)投影儀標(biāo)定示意
1.3 對極幾何
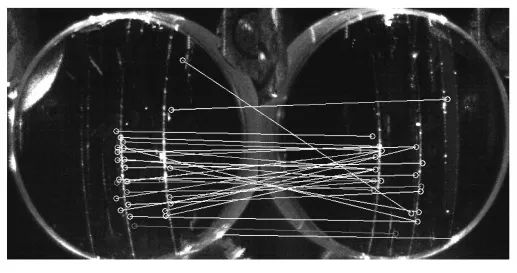
對極幾何是相機(jī)-投影儀自標(biāo)定的基礎(chǔ)。傳統(tǒng)標(biāo)定方法通過已知標(biāo)定物上特征點(diǎn)之間的尺寸關(guān)系構(gòu)建約束方程從而求解內(nèi)外參。自標(biāo)定過程由不涉及標(biāo)定物,而是利用場景約束構(gòu)建約束方程,通過求解約束方程來標(biāo)定相機(jī)和投影儀的內(nèi)外參。對極幾何示意如圖3所示。
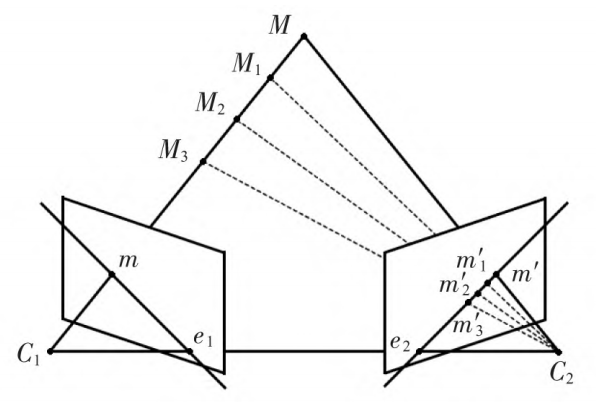
圖3 對極幾何示意
02 結(jié)構(gòu)光自標(biāo)定方法歸納
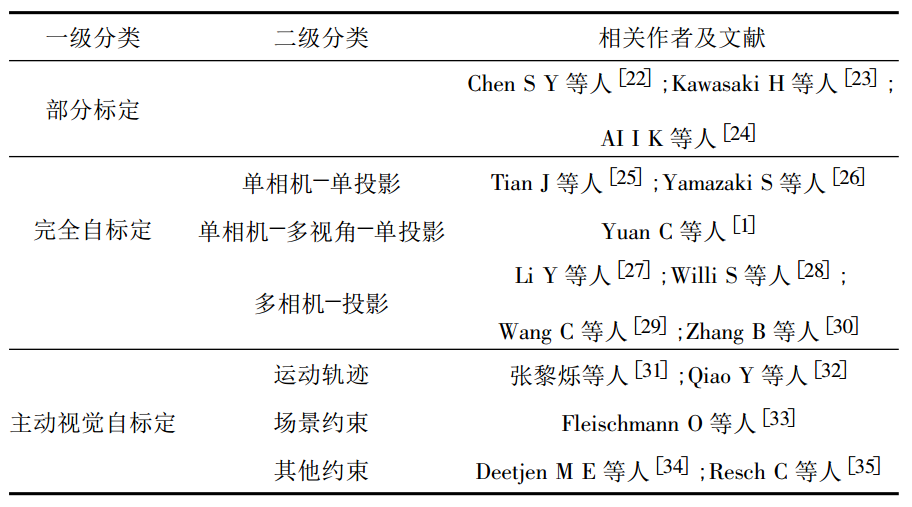
按照相機(jī)和投影儀數(shù)量不同,對結(jié)構(gòu)光自標(biāo)定方法歸納如表1所示。
表1 結(jié)構(gòu)光自標(biāo)定方法歸納
2.1 部分標(biāo)定
結(jié)構(gòu)光系統(tǒng)部分標(biāo)定是假設(shè)視覺系統(tǒng)中內(nèi)參或外參部分已知,通過已知參數(shù)結(jié)合自標(biāo)定算法求解夫知參數(shù),通常已知相機(jī)-投影儀內(nèi)參,標(biāo)定外參。Chen S Y等人在假設(shè)已知相機(jī)和投影儀內(nèi)參情況下,提出一種自標(biāo)定算法獲得相機(jī)和投影儀的相對位置關(guān)系,與之類似的還有文獻(xiàn)等;AI I K等人提出一種新的標(biāo)定構(gòu)架,他們搭建的結(jié)構(gòu)光系統(tǒng)由多個(gè)相機(jī)和一個(gè)投影儀組成,但是投影儀的投影過程由人為設(shè)置或者控制;范劍英等人針對雙相機(jī)-單投影儀的結(jié)構(gòu)光系統(tǒng)進(jìn)行自標(biāo)定,內(nèi)參通過一塊圓點(diǎn)平面標(biāo)定板進(jìn)行標(biāo)定,再利用自標(biāo)定算法標(biāo)定外參;除此之外,還有 Garrido-Jurado S等人的方法均與之類似。
2.2 完全自標(biāo)定
相機(jī)-投影儀結(jié)構(gòu)光系統(tǒng)完全自標(biāo)定是指標(biāo)定過程不借助外部標(biāo)定物,僅通過投影儀投射圖像和相機(jī)捕獲終像對應(yīng)間關(guān)系,構(gòu)建約束方程,求解相機(jī)和投影儀的內(nèi)外參數(shù)。完全自標(biāo)定相比其他自標(biāo)定方法更具吸引力,針對其技術(shù)方案與數(shù)學(xué)模型進(jìn)行討論是有必要的。完全自標(biāo)定根據(jù)標(biāo)定對象又可以劃分為單相機(jī)-單投影、單相機(jī)-多視角-單投影和多相機(jī)-投影的完全自標(biāo)定。
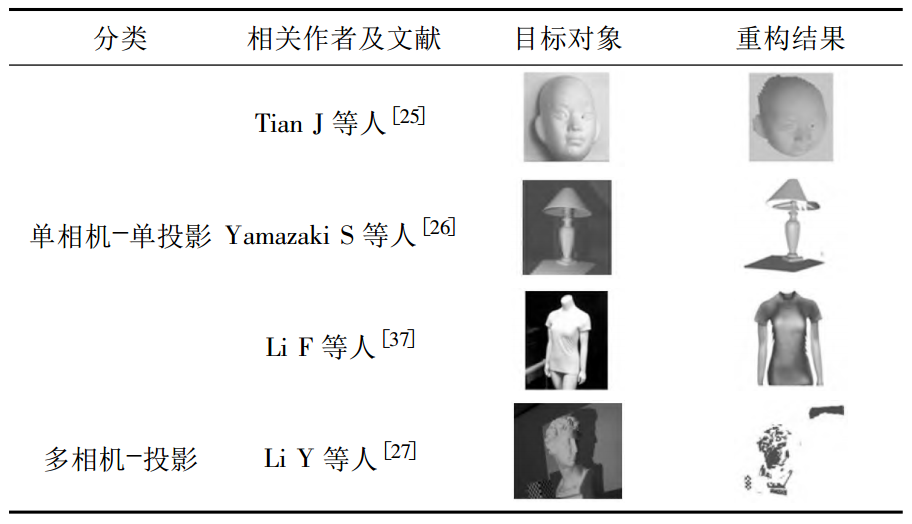
結(jié)構(gòu)光完全自標(biāo)定是結(jié)構(gòu)光自標(biāo)定領(lǐng)域一個(gè)重要分支,同時(shí)也是一個(gè)重點(diǎn)研究內(nèi)容;自標(biāo)定結(jié)果準(zhǔn)確與否,除了比對標(biāo)定參數(shù)外,觀察最終重構(gòu)結(jié)果也是一個(gè)重要參考指標(biāo),重構(gòu)效果對比如表2所示。
表2 結(jié)構(gòu)光完全自標(biāo)定重構(gòu)結(jié)果對比
2.3 基于主動視覺自標(biāo)定
基于主動視覺的結(jié)構(gòu)光自標(biāo)定方法介于上述兩和自標(biāo)定方法之間,其本身不需要預(yù)先對內(nèi)外參進(jìn)行標(biāo)定,但是需要在自標(biāo)定過程中給定部分已知信息、空間場景、運(yùn)動軌跡等。
03 問題與挑戰(zhàn)
相機(jī)-投影儀結(jié)構(gòu)光系統(tǒng)自標(biāo)定方法相比傳統(tǒng)標(biāo)定方法在某些方面具有顯著優(yōu)勢,如運(yùn)動物體在線測量、變焦拍攝等場景,但是,在實(shí)際應(yīng)用的過程中仍然存在一些問題與挑戰(zhàn)。
1)精度與魯棒性方面:與傳統(tǒng)標(biāo)定方法相比,自標(biāo)定算法在精度和魯棒性方面存在著明顯不足,在不增加外部標(biāo)定物的情況下利用完全自標(biāo)定算法精確獲得相機(jī)內(nèi)參、外參和畸變參數(shù),是一個(gè)巨大挑戰(zhàn)。
2)內(nèi)參假設(shè):當(dāng)前自標(biāo)定算法在內(nèi)參標(biāo)定時(shí)基本都進(jìn)行了一定假設(shè),例如假設(shè)x方向的焦距與y方向的焦距相等,扭曲因子為零等,其原因是當(dāng)前尚沒有合適的數(shù)學(xué)模型能夠求解完全形態(tài)的相機(jī)內(nèi)參數(shù)。
3)畸變參數(shù)求解:當(dāng)前自標(biāo)定算法主要是對徑向畸變參數(shù)進(jìn)行標(biāo)定,切向畸變和薄棱鏡畸變在目前結(jié)構(gòu)光自標(biāo)定中考慮很少,因此,結(jié)構(gòu)光系統(tǒng)的非線性自標(biāo)定有待提高。
4)多相機(jī)-投影的同步完全自標(biāo)定:隨著硬件與計(jì)算力的快速提升,多相機(jī)-投影結(jié)構(gòu)光必然成為未來的趨勢,因此,針對多相機(jī)-投影自標(biāo)定算法的研究也將成為一個(gè)重點(diǎn)研究方向。然而,到目前為止,針對多相機(jī)-投影完全自標(biāo)定僅有 Willi S等人進(jìn)行研究,而針對多相機(jī)-投影同步完全自標(biāo)定尚無相關(guān)研究成果出現(xiàn)。
04 結(jié)束語
本文綜述了近年來結(jié)構(gòu)光自標(biāo)定算法的研究狀況,發(fā)現(xiàn)針對結(jié)構(gòu)光自標(biāo)定研究較少,完全及同步自標(biāo)定研究更少,但單相機(jī)-單投影的結(jié)構(gòu)光系統(tǒng)標(biāo)定的研究相對成熟,多相機(jī)-投影儀的同步完全自標(biāo)定尚無有效解決方案。此外,針對相機(jī)-投影儀完全自標(biāo)定技術(shù)方案從底層數(shù)學(xué)模型進(jìn)行闡述,面對當(dāng)前結(jié)構(gòu)光自標(biāo)定算法中存在的問題,給出一些可能的解決方案。
未來,將設(shè)計(jì)目標(biāo)函數(shù)時(shí)以約束項(xiàng)的形式考慮之前通過假設(shè)舍去的內(nèi)參和畸變參數(shù),引入深度學(xué)習(xí)對約束項(xiàng)參數(shù)進(jìn)行調(diào)整和優(yōu)化,通過迭代進(jìn)行求解;針對多相機(jī)-投影結(jié)構(gòu)光系統(tǒng)同步完全自標(biāo)定,考慮分解為多相機(jī)系統(tǒng)自標(biāo)定和單相機(jī)-單投影同步完全自標(biāo)定兩個(gè)過程,分別設(shè)計(jì)求解承數(shù),最后將兩個(gè)目標(biāo)承數(shù)整合為一個(gè)總的目標(biāo)雨數(shù),通過迭代求解達(dá)到全局最優(yōu),從而實(shí)現(xiàn)多相機(jī)-投影結(jié)構(gòu)光系統(tǒng)的同步完全自標(biāo)定。
審核編輯 :李倩
-
投影儀
+關(guān)注
關(guān)注
4文章
890瀏覽量
43920 -
數(shù)據(jù)庫
+關(guān)注
關(guān)注
7文章
3901瀏覽量
65791 -
結(jié)構(gòu)光
+關(guān)注
關(guān)注
0文章
74瀏覽量
13442
原文標(biāo)題:結(jié)構(gòu)光自標(biāo)定方法綜述
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于機(jī)器視覺的攝像機(jī)標(biāo)定理論與各種方法分析
攝像機(jī)標(biāo)定理論是什么?其方法有哪些?
基于模型的電機(jī)標(biāo)定方法
自適應(yīng)卡爾曼濾波在平臺射前自標(biāo)定中的應(yīng)用
基于多視圖像的攝像機(jī)自標(biāo)定方法
基于LABVIEW的圖像測量技術(shù)標(biāo)定方法
基于移動平面靶標(biāo)的標(biāo)定方法
如何使用線紋尺的線結(jié)構(gòu)光視覺傳感器進(jìn)行視覺檢測標(biāo)定的方法說明
結(jié)構(gòu)光視覺的優(yōu)點(diǎn)和標(biāo)定方法分析

MEMS陀螺捷聯(lián)慣導(dǎo)系統(tǒng)標(biāo)定方法綜述
3D結(jié)構(gòu)光的優(yōu)點(diǎn)及參數(shù)如何進(jìn)行標(biāo)定
結(jié)構(gòu)光視覺傳感器參數(shù) 結(jié)構(gòu)光視覺測量原理圖
張氏標(biāo)定法的原理和實(shí)現(xiàn)
什么是相機(jī)標(biāo)定 常用相機(jī)標(biāo)定的方法

機(jī)器視覺的攝像機(jī)標(biāo)定技術(shù)你知道多少?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論