 STM32入門學習筆記之485通信實驗
STM32入門學習筆記之485通信實驗
17.1 485協議概述
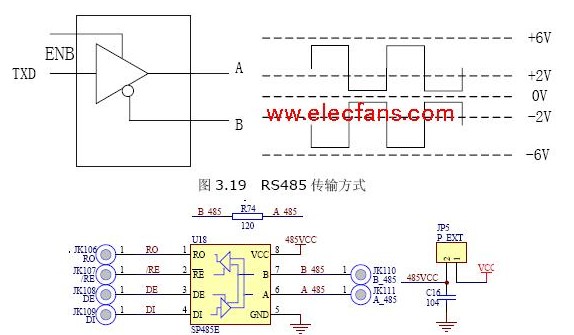
485是屬于OSI模型物理層的電氣標準,屬于2線制,半雙工,多點通信標準,485總線采用兩根線路的電壓差來傳遞信號,485兩根線路名稱為A和B,當線路A與線路B的電壓差為+2 +6V時表示邏輯電平1,當線路A與線路B的電壓差為-2 -6V時表示邏輯電平0,485與232協議都屬于串口通信協議,都是采用轉換芯片將USART接口電平轉換為485電平或者232電平,485協議傳輸速率在10米時候可達35Mbps,在1200米是可達到100Kbps,最大支持總線掛載32個節點,如果采用特制的芯片可以達到400個節點。
485電氣連接中,為了進行阻抗匹配,需要在兩根線路中并聯一個120Ω的電阻,一般是一個設備并聯一個,所以485協議只是之前USART協議的另一種表現形式,通過之前掌握的USART配置,借助485轉換芯片就可以完成485通信線路的搭建。
17.2 實驗例程
采用STM32F103ZET6芯片的PA2(USART2_TXD)和PA3(USART2_RXD)和一個485轉換芯片SP485來實現RS485通信。其中SP485引腳描述如下圖所示。
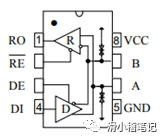
| 序號 | 名稱 | 功能描述 |
|---|---|---|
| 1 | RO | 接收器輸出端:當RE為低電平時,若A-B≧200mV,RO輸出為高電平若A-B≦-200mV,RO輸出為低電平 |
| 2 | RE | 接收器輸出使能控制當RE接低電平時,接收器輸出使能,RO輸出有效當RE接高電平時,接收器輸出禁能,RO為高阻態RE接高電平且DE接低電平時,器件進入低功耗關斷模式 |
| 3 | DR | 驅動器輸出使能控制DE接高電平時驅動器輸出有效,DE為低電平時輸出為高阻態RE接高電平且DE接低電平時,器件進入低功耗關斷模式 |
| 4 | DI | DI驅動器輸入DE為高電平時,DI上的低電平使驅動器同相端輸出為低電平,反相端輸出為高電平DI上的高電平將使同相端輸出為高電平,反相端輸出為低 |
| 5 | GND | 電源地 |
| 6 | A | 接收器同相輸入和驅動器同相輸出端 |
| 7 | B | 接收器反相輸入和驅動器反相輸出端 |
| 8 | VCC | 電源,推薦3.3V |
根據上面的芯片描述,我們可以得到連接如下所示。
USART2_TXD(即PA2)接RO端
USART2_RXD(即PA3)接DI端
PD7接DR與RE端
(1)創建rs485.h文件,輸入以下代碼。
/*********************************************************************************************************
RS485 驅 動 文 件
*********************************************************************************************************/
#ifndef _RS485_H_
#define _RS485_H_
#include "sys.h"
/*********************************************************************************************************
硬 件 端 口 定 義
*********************************************************************************************************/
#define RS485_EN PDout( 7 )
/*********************************************************************************************************
數 據 結 構 定 義
*********************************************************************************************************/
typedef struct
{
u8 Buffer[ 255 ] ;
u8 Len ;
}Communication_Data;
extern Communication_Data RS485_Data;
/*********************************************************************************************************
函 數 列 表
*********************************************************************************************************/
void RS485_Init( u32 pclk1,u32 bound ) ; //RS485初始化
void RS485_Send_Data( u8 *buf, u8 len ) ; //發送n個字節
void RS485_Receive_Data( u8 *buf, u8 *len ) ; //接收n個字節
#endif
(2)創建rs485.c文件,輸入以下代碼。
#include "rs485.h"
#include "delay.h"
Communication_Data RS485_Data;
/***************************************************
Name :USART2_IRQHandler
Function :串口2中斷服務函數
Paramater :None
Return :None
***************************************************/
void USART2_IRQHandler()
{
//接收到數據
if( USART2->SR&( 1<<5 ) )
{
RS485_Data.Buffer[ RS485_Data.Len ] = USART2->DR ; //記錄接收到的值
RS485_Data.Len ++ ; //接收數據增加1
}
}
/***************************************************
Name :RS485_Send_Data
Function :接收n個字節
Paramater :
*buf:接收區首地址
len:讀取的字節數
Return :None
***************************************************/
void RS485_Receive_Data( u8 *buf, u8 *len )
{
u8 i, rxlen=RS485_Data.Len ;
delay_ms( 10 ) ; //連續超過10ms沒有接收到一個數據,則認為接收結束
//接收到了數據,且接收完成了
if( ( rxlen==RS485_Data.Len )&&( rxlen!=0 ) )
{
for( i=0; i(3)創建1.c文件,輸入以下代碼。
#include "sys.h"
#include "delay.h"
#include "usart1.h"
#include "rs485.h"
int main()
{
u8 len, datatemp[ 10 ] ;
STM32_Clock_Init( 9 ) ; //STM32時鐘初始化
SysTick_Init( 72 ) ; //SysTick初始化
USART1_Init( 72, 115200 ) ; //初始化串口1波特率115200
RS485_Init( 36, 9600 ) ; //初始化RS485
RS485_Send_Data( "RS485 Test", 10 ) ; //發送數據
while( 1 )
{
RS485_Receive_Data( datatemp, &len ) ;
delay_ms( 10 ) ;
}
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6061文章
44866瀏覽量
646011 -
OSI
+關注
關注
0文章
84瀏覽量
15600 -
485總線
+關注
關注
1文章
29瀏覽量
16931
發布評論請先 登錄
相關推薦
熱點推薦
串口通信實驗分享
實驗四、串口通信實驗? 自律學習堅強 ,拒絕迷茫。作者:行走的皮卡丘時間:2021/4/4喜歡就去追,這個紅燈等不到,說不定下一個紅燈等到了,嘻嘻!!!!!!!文章目錄實驗四、串口
發表于 01-14 09:08
STM32各模塊學習筆記
STM32個模塊學習筆記 目錄 STM32筆記之一 中斷優先級.......................................
發表于 11-30 03:32
?3222次閱讀
STM32CubMX自學筆記(七)—CAN通信實驗
STM32CubMX自學筆記(七)—CAN通信實驗主要介紹由于項目需求要用到CAN通信協議,因此學習一下CAN
發表于 12-04 18:21
?12次下載

STM32入門學習筆記之CAN通信實驗1
CAN是Controller Area Network的縮寫,最初是專門用于汽車網絡的通信協議,與485協議相似,CAN也是一種2線制,采用兩根線的電壓差進行數據傳輸的協議,隨著CAN協議的高性能
STM32入門學習筆記之CAN通信實驗2
CAN是Controller Area Network的縮寫,最初是專門用于汽車網絡的通信協議,與485協議相似,CAN也是一種2線制,采用兩根線的電壓差進行數據傳輸的協議,隨著CAN協議的高性能
STM32入門學習筆記之CAN通信實驗3
CAN是Controller Area Network的縮寫,最初是專門用于汽車網絡的通信協議,與485協議相似,CAN也是一種2線制,采用兩根線的電壓差進行數據傳輸的協議,隨著CAN協議的高性能
STM32入門學習筆記之CAN通信實驗4
CAN是Controller Area Network的縮寫,最初是專門用于汽車網絡的通信協議,與485協議相似,CAN也是一種2線制,采用兩根線的電壓差進行數據傳輸的協議,隨著CAN協議的高性能





 工商網監
工商網監
評論