 機器人技術與系統國家重點實驗室劉英想教授團隊在壓電機械手研究方面取得新進展
機器人技術與系統國家重點實驗室劉英想教授團隊在壓電機械手研究方面取得新進展
近日,機器人技術與系統國家重點實驗室劉英想教授團隊在壓電機械手研究方面取得新進展,開發出由壓電陶瓷驅動的新型4指壓電機械手,相關成果以《面向宏微跨尺度操控的壓電機械手》(Piezo robotic hand for motion manipulation from micro to macro)為題發表在《自然通訊》(NatureCommunications)上。壓電機械手獨特的宏微運動操控能力有望解決諸多先進技術領域面臨的跨尺度精細操控難題。
機械手可代替或輔助人手實現靈巧操控,在機器人輔助操控領域有著舉足輕重的地位,其功能與性能直接影響系統的服務水平。現有機械手種類繁多,在結構特征、換能原理和傳動方式方面不盡相同,由于換能原理和運動傳遞策略的限制,其在動作精度、電磁兼容性和結構緊湊性等方面存在諸多局限。如何尋找新換能原理的驅動模式,設計更高效、更精密的傳動機構,甚至完全摒棄傳動機構,成為研制機械手的新焦點和新挑戰。
該項研究工作開發出運用壓電陶瓷構造的4指機械手。該機械手采用4指陣列均布構型,其手指為4分區環形壓電陶瓷集成一體化結構,憑借逆壓電效應實現電能至機械能轉換,從而將壓電陶瓷的多維微觀變形轉換為手指的多維運動。
團隊運用4指協同操控思想規劃了10余種典型功能化操控手勢,借助動靜摩擦交替操控方法實現平板型、圓柱型、球型等物體的多維跨尺度操控;詳細研究了壓電機械手的遲滯(《3.95%)、分辨力(15納米)、響應時間(0.5毫秒)、固有頻率(4.1千赫茲)等特性,以及操控平板物體的運動特性;通過實驗驗證了壓電機械手對各類物體的高適應性、多自由度、跨尺度操控能力。一系列應用探索試驗成功展示了壓電機械手在構建多自由度操控設備和集成機械臂末端執行器等方面的應用潛力。該項工作以無傳動高剛性功能陶瓷集成一體化構型為核心,展示了運用壓電陶瓷微觀變形實現宏微跨尺度運動操控的可行性,相關多維運動生成方法和功能手勢協同操控思想為機械手研制提供了新思路。
我校為論文唯一通訊單位。機電學院博士研究生張仕靜、劉英想教授、鄧杰副教授為論文共同第一作者。劉英想教授為論文唯一通訊作者。機電學院博士研究生高祥、李京、王瑋亦、荀銘鑫、馬雪峰、常慶兵,機電學院劉軍考教授、陳維山教授、趙杰教授為論文共同作者。
該研究獲得國家自然科學基金、哈工大醫工理交叉基金的資助。此外,該4指壓電機械手曾獲第四屆中國研究生機器人創新設計大賽特等獎。
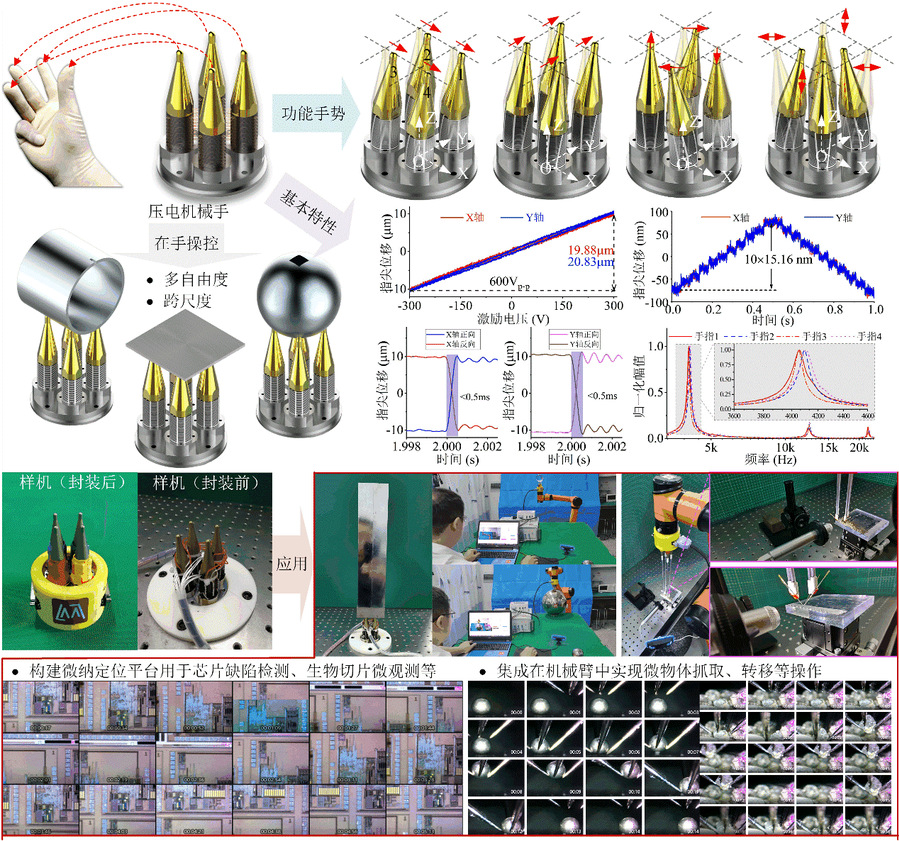
壓電機械手的結構、手勢、特性、樣機與應用示意圖
論文鏈接:
https://www.nature.com/articles/s41467-023-36243-3
審核編輯 :李倩
-
電磁兼容性
+關注
關注
6文章
466瀏覽量
34110 -
機器人技術
+關注
關注
18文章
194瀏覽量
32294
原文標題:機器人技術與系統國家重點實驗室劉英想教授團隊在壓電機械手研究方面取得新進展
文章出處:【微信號:robotmagazine,微信公眾號:機器人技術與應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
開啟全新AI時代 智能嵌入式系統快速發展——“第六屆國產嵌入式操作系統技術與產業發展論壇”圓滿結束
封裝天線技術的發展動向與新進展
設計一種可用于大學和學校教授機器人技術的機器人
有機場效應晶體管研究取得重要進展

中科院半導體研究所在柔性人工視覺感知和存儲系統領域中取得新進展
紅外物理國家重點實驗室在非平衡電子態操控領域取得突破

NVIDIA西雅圖機器人技術研究實驗室負責人是誰?
上海光機所在皮秒激光器精密光同步研究方面取得新進展
上海光機所在強場太赫茲對砷化鎵偶次諧波調控研究方面取得新進展





 工商網監
工商網監
評論