") 基礎(chǔ)設(shè)施到車輛(I2V)信息在自動(dòng)駕駛中的作用
基礎(chǔ)設(shè)施到車輛(I2V)信息在自動(dòng)駕駛中的作用
在能見(jiàn)度有限的高密度交通情況下,使用基礎(chǔ)設(shè)施到車輛(I2V)信息可以為自動(dòng)駕駛帶來(lái)巨大好處,因?yàn)檐囕v的傳感能力可以通過(guò)外部傳感器增強(qiáng)。在這項(xiàng)研究中,介紹了一種方法來(lái)提高車輛在十字路口的自我意識(shí),以應(yīng)對(duì)使用I2V通信時(shí)最大的可預(yù)見(jiàn)挑戰(zhàn)之一:網(wǎng)絡(luò)安全。本文介紹的異常檢測(cè)算法,運(yùn)行在自動(dòng)駕駛車輛上,評(píng)估I2V通信在多種網(wǎng)絡(luò)安全攻擊下的健康狀況。該分析是在模擬環(huán)境中進(jìn)行的,使用Secredas項(xiàng)目(跨領(lǐng)域可靠的自動(dòng)化系統(tǒng)的網(wǎng)絡(luò)安全)中的網(wǎng)絡(luò)攻擊場(chǎng)景,并提供了對(duì)車輛在面對(duì)不同類型和幅度的I2V網(wǎng)絡(luò)攻擊以及傳感器冗余丟失時(shí)的限制的深入了解。結(jié)果表明,自動(dòng)駕駛汽車可以有效地檢測(cè)和緩解注入的異常,使其能夠更安全、更舒適地做出反應(yīng),并在交叉路口保持正確的目標(biāo)跟蹤。
I.簡(jiǎn)介
聯(lián)網(wǎng)和自動(dòng)駕駛正在成為更安全、更高效、可持續(xù)和舒適的道路交通系統(tǒng)的解決方案,[1]。汽車制造商將不同的駕駛輔助或自主功能帶到道路上,增加了連接的可能性,如車對(duì)車(V2V)、車對(duì)基礎(chǔ)設(shè)施(V2I、I2V)或車對(duì)一切(V2X、X2V)。它們帶來(lái)了功能和性能上的好處,但也帶來(lái)了網(wǎng)絡(luò)安全和隱私方面的風(fēng)險(xiǎn)和擔(dān)憂:自動(dòng)駕駛汽車是物聯(lián)網(wǎng)(IoT)中的一種事務(wù),它可能會(huì)導(dǎo)致危險(xiǎn)情況,并收集大量數(shù)據(jù)。
通過(guò)X2V通信,現(xiàn)在可以在不處于特定物理范圍或使用預(yù)先安裝的硬件的情況下侵入車輛,[2]。缺乏網(wǎng)絡(luò)安全會(huì)導(dǎo)致不安全的情況,并將造成用戶缺乏信任和帶有負(fù)面情緒。這就要求改進(jìn)互聯(lián)和自動(dòng)駕駛的安全和保障設(shè)計(jì)概念,能夠檢測(cè)到虛假和篡改的X2V信息,并作出主動(dòng)和安全的反應(yīng)。
異常,在ISO 26262標(biāo)準(zhǔn)中被定義為偏離預(yù)期的情況,例如基于需求、規(guī)格、設(shè)計(jì)文件、用戶文件、標(biāo)準(zhǔn)或經(jīng)驗(yàn)[3],可以有多種形式和模式。
更具體地說(shuō),網(wǎng)絡(luò)異常(即入侵企圖或威脅)被用來(lái)訪問(wèn)和操縱信息或使系統(tǒng)不可靠或無(wú)法使用。檢測(cè)網(wǎng)絡(luò)異常是指實(shí)時(shí)檢測(cè)I2V流量中不符合預(yù)期正常行為的錯(cuò)誤模式和異常現(xiàn)象,[4]。I2V通信是非常有益的,特別是在交叉路口的情況下,路側(cè)單元(RSU)被用來(lái)通信觀察到的易受傷害的道路使用者(VRU)的位置,提高跟蹤范圍和檢測(cè)對(duì)象的狀態(tài)估計(jì)精度,[5]。
目前已經(jīng)開(kāi)發(fā)了多種異常檢測(cè)方法,可應(yīng)用于I2V網(wǎng)絡(luò)攻擊,其中許多方法側(cè)重于有限場(chǎng)景下單一和已知類型的異常,或考慮合作駕駛中另一輛領(lǐng)先車輛[6]的狀態(tài)。例如,[7]中使用了粒子篩選和最大似然法,[8]中使用成對(duì)不一致圖比較傳感器輸出,[9]使用卷積神經(jīng)網(wǎng)絡(luò)和卡爾曼篩選器之間的組合,[10]使用長(zhǎng)短期記憶(LSTM)神經(jīng)網(wǎng)絡(luò)。
此外,一些研究已經(jīng)介紹了網(wǎng)絡(luò)攻擊通常可以預(yù)期的異常類型,[4],[9]和可能的攻擊者行為[11],但還沒(méi)有介紹可以通過(guò)I2V通信處理交叉路口周圍多種類型攻擊的方法,如圖1所示。也不知道傳感器冗余如何有助于確保車輛的安全運(yùn)行,并如何用于識(shí)別異常情況。
為了應(yīng)對(duì)這一挑戰(zhàn),本文提出了一個(gè)擴(kuò)展的卡爾曼濾波器(EKF)來(lái)檢測(cè)來(lái)自I2V通信的車內(nèi)網(wǎng)絡(luò)攻擊所導(dǎo)致的物體跟蹤異常情況。我們選擇這種算法是為了從易受傷害的道路使用者的領(lǐng)域知識(shí)中獲益,并且因?yàn)镋KF是一種成熟的異常檢測(cè)方法,[9]。
與之前的工作不同,我們針對(duì)自動(dòng)駕駛汽車可能遇到的交叉口場(chǎng)景,在多種類型的攻擊上開(kāi)發(fā)并驗(yàn)證了我們的方法,討論了傳感器冗余的重要性,這取決于不同的異常情況。本文的組織結(jié)構(gòu)如下。
第二節(jié)介紹了自動(dòng)駕駛汽車的功能結(jié)構(gòu)和考慮的攻擊類型,第三節(jié)介紹了異常檢測(cè)問(wèn)題、場(chǎng)景和開(kāi)發(fā)的仿真環(huán)境。第四節(jié)和第五節(jié)介紹了擴(kuò)展的卡爾曼濾波器和由該設(shè)計(jì)產(chǎn)生的仿真結(jié)果。最后,第六節(jié)介紹了結(jié)論和對(duì)未來(lái)工作的建議。
II.前言
在自動(dòng)駕駛(AD)車輛中,內(nèi)部和可能的外部傳感器用于監(jiān)控環(huán)境。系統(tǒng)架構(gòu)和異常類型對(duì)于開(kāi)發(fā)檢測(cè)這些異常的可靠方法非常重要。本節(jié)介紹了所使用的車輛功能結(jié)構(gòu)、現(xiàn)有異常類型的概述以及與通過(guò)I2V進(jìn)行網(wǎng)絡(luò)攻擊有關(guān)的選擇。
A.傳感器融合和物體追蹤
圖2描述了自動(dòng)車輛的功能結(jié)構(gòu),其中世界建模包含自我車輛狀態(tài)估計(jì)功能、物體檢測(cè)和跟蹤功能以及道路建模功能,如車道和空的可駕駛空間模型。
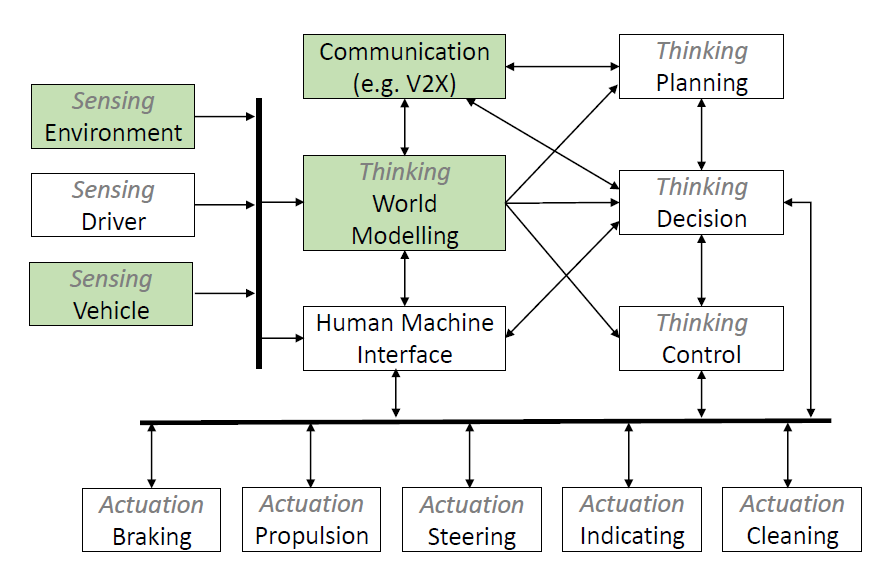
圖2. AD應(yīng)用程序的功能結(jié)構(gòu),突出了用于I2V異常檢測(cè)的組件(基于[12], [13])。
車輛環(huán)境中的動(dòng)態(tài)物體由車載傳感器(即雷達(dá)、激光雷達(dá)、照相機(jī))跟蹤,為車輛提供相對(duì)測(cè)量。此外,在圖1的場(chǎng)景中,連接到RSU的攝像機(jī)使用I2V通信提供絕對(duì)測(cè)量。這些傳感器測(cè)量值,連同自我車輛狀態(tài)估計(jì),被一個(gè)模塊,即目標(biāo)跟蹤器,融合為一個(gè)單一的物體狀態(tài)估計(jì)。
B.異常情況類型
異常的傳感器行為可以有不同的形式,這給檢測(cè)偏離穩(wěn)健行為帶來(lái)了不同的挑戰(zhàn)。除了惡意攻擊外,這些異常可能來(lái)自例如錯(cuò)誤的傳感器校準(zhǔn)、有限的傳感器能力和環(huán)境影響,[9]。在[14]中介紹了可能的傳感器信號(hào)異常的類別,其中三個(gè)主要類別被解釋為重要的并在實(shí)際部署中觀察到的,即短, 噪音 和持續(xù)。更詳細(xì)地說(shuō),作者在[9]中區(qū)分了四種類型的異常,即偏差、逐漸漂移、瞬間和缺失。
偏差異常意味著與正常的傳感器讀數(shù)相比,異常信號(hào)有一個(gè)時(shí)間上的恒定誤差。逐漸漂移是指在一段時(shí)間內(nèi),觀察到的數(shù)據(jù)逐漸漂移(增加或減少),有或沒(méi)有偏差。漂移的周期越長(zhǎng),相對(duì)于觀察對(duì)象的真實(shí)狀態(tài)而言,特定的信號(hào)就越危險(xiǎn),越不具代表性。
瞬間異常意味著在兩個(gè)連續(xù)的傳感器讀數(shù)之間觀察到的數(shù)據(jù)發(fā)生了急劇的、無(wú)法解釋的變化,而缺失異常僅僅指在一個(gè)時(shí)間段內(nèi)缺乏可用的物體或信號(hào)數(shù)據(jù)。[6]中的作者認(rèn)為,額外的異常情況可以是噪音,其中信號(hào)被擾亂(例如相機(jī)圖像中亮度或顏色信息的隨機(jī)變化),或突發(fā),其中信號(hào)在短時(shí)間內(nèi)被擾亂(例如開(kāi)車經(jīng)過(guò)一個(gè)坑洞)。
為了確保自我車輛在I2V網(wǎng)絡(luò)攻擊下的安全運(yùn)行,如圖1所示,檢測(cè)那些異常情況是至關(guān)重要的,這些異常情況會(huì)提供錯(cuò)誤的信息,從而導(dǎo)致自動(dòng)車輛做出錯(cuò)誤的決定(例如,與接近的行人或騎自行車的人相撞)。如[15]中的概述所示,網(wǎng)絡(luò)攻擊也可以誘發(fā)其他的異常情況(如車內(nèi)通信),但本研究的重點(diǎn)是來(lái)自基礎(chǔ)設(shè)施到車輛的攻擊,這可能導(dǎo)致不安全的情況。
因此,這項(xiàng)工作特別關(guān)注瞬間、偏差和漸進(jìn)式漂移異常,聲稱例如噪音和突發(fā)異常可以被分類為強(qiáng)烈的時(shí)間性瞬間、偏差和/或漂移異常,而漏報(bào)異常將由目標(biāo)追蹤器內(nèi)部處理。這些類型的異常構(gòu)成了最高的威脅,對(duì)合作的自動(dòng)駕駛汽車來(lái)說(shuō)是最危險(xiǎn)的,[16][17]。
由于在所考慮的情況下,惡意數(shù)據(jù)來(lái)自于一個(gè)RSU,這項(xiàng)工作的重點(diǎn)將是檢測(cè)傳感器的異常情況(即任何嵌入或附著在車輛上的傳感器,以及位于環(huán)境中的傳感器)。這里不討論來(lái)自融合狀態(tài)輸出的異常,因?yàn)檫@是另一種類型的問(wèn)題。
III.問(wèn)題描述
雖然I2V可以提高AD車輛在視野范圍和傳感器冗余方面的物體探測(cè)能力,但為傳感器融合而交流物體信息確實(shí)帶來(lái)了網(wǎng)絡(luò)安全威脅,因?yàn)閿?shù)據(jù)有可能被欺騙或篡改。使用這種被篡改的數(shù)據(jù)進(jìn)行傳感器融合可能會(huì)導(dǎo)致錯(cuò)誤的物體位置或速度估計(jì),并因此可能導(dǎo)致安全關(guān)鍵的情況。
當(dāng)在融合狀態(tài)估計(jì)中檢測(cè)到異常時(shí)(在圖2中的世界建模塊中),可以警告駕駛員感知模型可能受到損害,或者AD-系統(tǒng)可以將車輛帶入安全狀態(tài)。然而,無(wú)法避免狀態(tài)估計(jì)的完整性受損。通過(guò)單獨(dú)監(jiān)控傳感器的異常情況,可以確定它們的健康狀況,并在傳感器融合算法中暫時(shí)忽略或永久禁用受損傳感器。
A.系統(tǒng)描述
所考慮的自動(dòng)駕駛汽車配備了專用的汽車傳感器(雷達(dá)、照相機(jī)、激光雷達(dá)、GPS),以及用于軟件和通信的專用單元。RSU是位于十字路口一側(cè)的監(jiān)控系統(tǒng),例如,檢測(cè)VRU的攝像頭。該通信是通過(guò)集合感知消息(CPM)接收器和對(duì)象解析器完成的,該接收器將相對(duì)攝像機(jī)對(duì)象檢測(cè)并將其轉(zhuǎn)換為全局參考系,以便與車輛的參考系相關(guān)聯(lián)。該解析器還將信息調(diào)整為Target Tracker軟件的接口。
B.情景及其變化
在所考慮的場(chǎng)景中,一輛AD車輛正在接近十字路口,并從被黑的RSU接收惡意信息,這是本研究中考慮的唯一受到攻擊影響的傳感器。車輛檢測(cè)到攻擊,并通過(guò)忽略目標(biāo)跟蹤器中的故障外部傳感器信息來(lái)減輕攻擊。在這種情況下,RSU傳輸VRU(行人或自行車手)的錯(cuò)誤位置,如圖3所示。變化的例子包括:
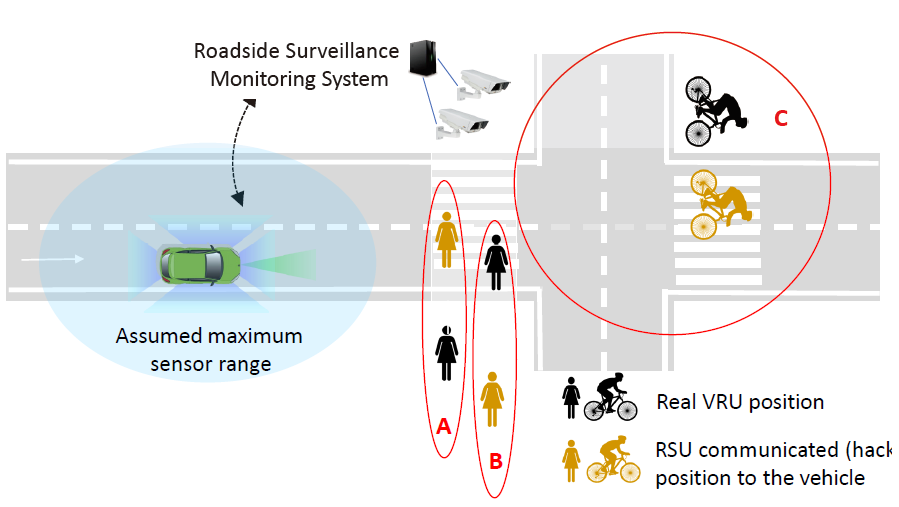
圖3. 異常RSU數(shù)據(jù)的情景示例。
(1) 在十字路口的一側(cè)有一個(gè)VRU,正在等待過(guò)馬路。被黑客攻擊的RSU傳達(dá)的信息是VRU在十字路口(圖3中的情況A),可能導(dǎo)致AD車輛不必要地在十字路口停車。這可能會(huì)導(dǎo)致,例如,即將到來(lái)的交通在自主車輛后面的其他危險(xiǎn)情況;
(2)一個(gè)VRU正在穿過(guò)十字路口(圖3中的情況B),被黑的RSU傳達(dá)出VRU位于十字路口的一側(cè),車輛故意不提醒經(jīng)過(guò)的VRU,這可能導(dǎo)致碰撞;
(3) 一個(gè)VRU要么在十字路口的一側(cè),要么在十字路口的不同位置。RSU將關(guān)于VRU的航向或速度的錯(cuò)誤信息發(fā)送給自動(dòng)車輛,這可能會(huì)誤導(dǎo)車輛的預(yù)測(cè)或意圖分類模型。
C.仿真環(huán)境
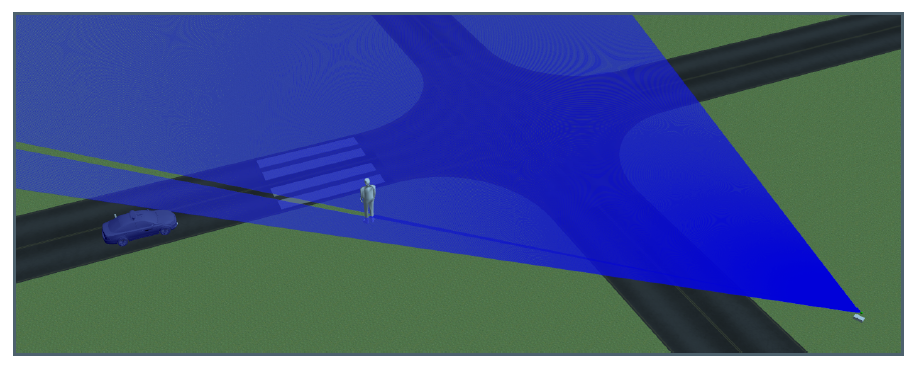
圖4.所示基于gazebo的模擬場(chǎng)景。
此外,為了使模擬盡可能逼真,對(duì)車載傳感器和路邊攝像頭都引入了傳感器噪音。按照汽車物體跟蹤傳感器的典型傳感器噪聲,噪聲水平,σ,是獨(dú)立的零均值白噪聲,其標(biāo)準(zhǔn)偏差如下(來(lái)自[21],作為正態(tài)分布的3σ值使用):
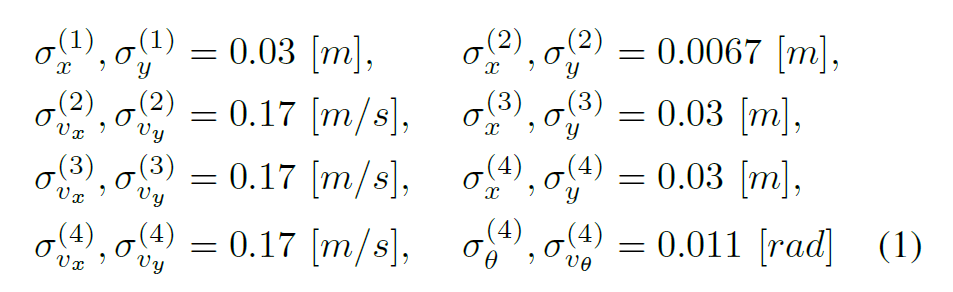
其中計(jì)數(shù)器值j e {1, 2, 3, 4}表示信號(hào)的傳感器來(lái)源,分別為雷達(dá)、激光雷達(dá)、照相機(jī)和RSU。為便于記述,本文其余部分均使用這個(gè)計(jì)數(shù)器j,其含義完全相同。此外, 下標(biāo) x, y, vx , vy 分別指物體的縱向和橫向位置和速度。
D.異常注入


為不同異常注入的誤差定義為






對(duì)于偏差異常和




IV.車載網(wǎng)絡(luò)威脅異常檢測(cè)
利用第三節(jié)的模擬數(shù)據(jù)、圖1中描述的場(chǎng)景以及可用的車載傳感器和RSU測(cè)量值,可以進(jìn)行故障診斷。
A.多傳感器EKF異常檢測(cè)算法
檢測(cè)傳感器異常行為的算法遵循圖2所示的架構(gòu),更詳細(xì)的視圖見(jiàn)圖5。異常檢測(cè)器是為檢測(cè)任何傳感器狀態(tài)的異常而設(shè)計(jì)的。一旦檢測(cè)到異常情況,只要異常情況持續(xù)存在,受影響的傳感器狀態(tài)在目標(biāo)追蹤器中就會(huì)被忽略。
該信息可用于忽略來(lái)自目標(biāo)跟蹤器傳感器融合的測(cè)量,以減輕某種狀態(tài)的融合估計(jì)中的異常。為了檢測(cè)上述故障類型,擴(kuò)展卡爾曼濾波器(EKF)與基于C2準(zhǔn)則的測(cè)試相結(jié)合,用于殘差評(píng)估[22,第11.2.2節(jié)]。EKF算法使用一個(gè)全向運(yùn)動(dòng)模型,狀態(tài)X = [x, y, θ, v, vθ , a] 其中x, y表示縱向和橫向位置,θ表示目標(biāo)相對(duì)于自動(dòng)駕駛汽車的方向。
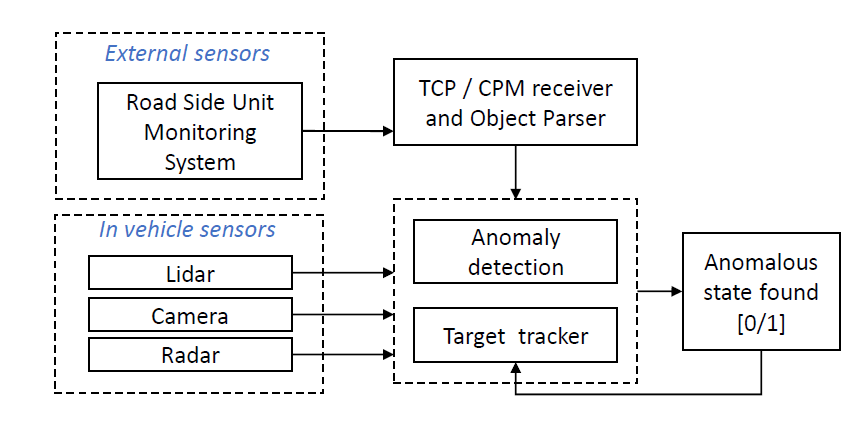
圖5. 異常檢測(cè)算法的示意圖以及它與目標(biāo)追蹤器的互動(dòng)方式。
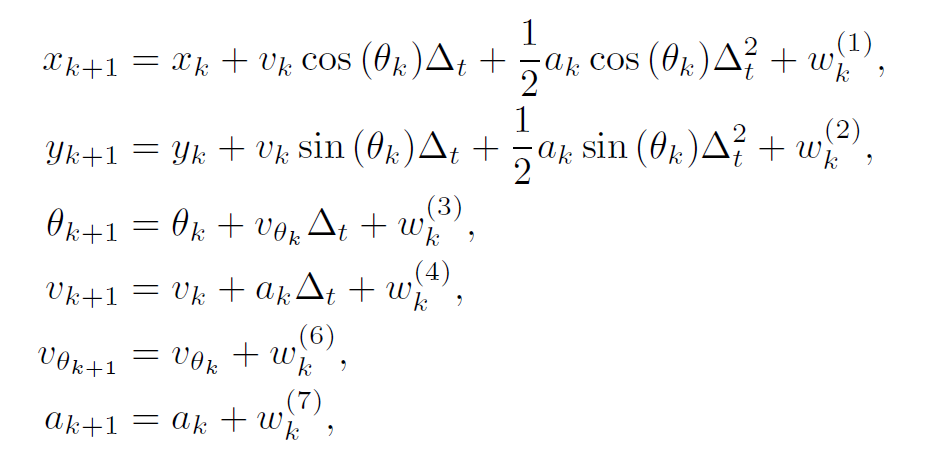
我們用v和a表示結(jié)果的平面速度和加速度, vθ 是航向的第一時(shí)間導(dǎo)數(shù)。這些結(jié)果分量可以用速度 vx , vy 和加速度ax , ay 表示如下:

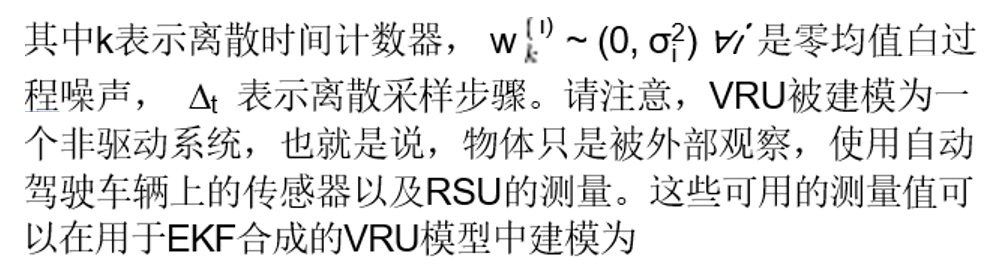
在模型中,假設(shè)有一個(gè)恒定的加速度a和恒定的偏航率 vθ 。這個(gè)假設(shè)是由于我們?cè)趫?chǎng)景中考慮了一個(gè)VRU(例如,一個(gè)行人或一個(gè)騎自行車的人),因此可以假設(shè)低動(dòng)態(tài)的行為。這個(gè)VRU的模型可以表示為:

其中zk是一個(gè)獨(dú)立的零均值白噪聲的矢量信號(hào),測(cè)量矩陣H的定義為:
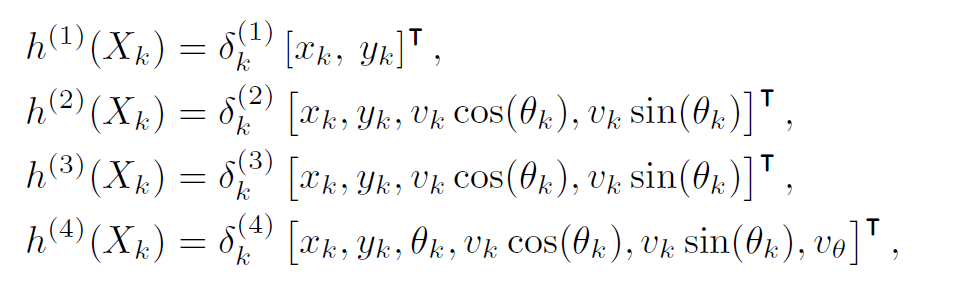

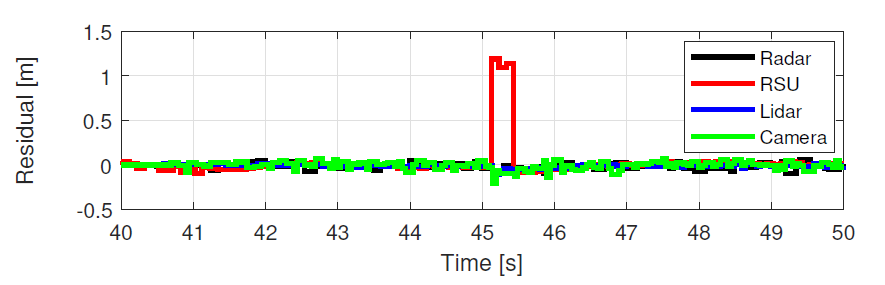
圖6所示。在時(shí)間t = 45秒的RSU的yk測(cè)量中引入了 exB = 1.28m偏置故障的EKF殘差示例。
EKF的融合狀態(tài)預(yù)測(cè)值 X?k]k - 1 及其協(xié)方差矩陣可以表示為:
其中 Pk,k - 1是狀態(tài)預(yù)測(cè)協(xié)方差矩陣,Ak 是f (Xk )的協(xié)方差 and Q是過(guò)程噪聲協(xié)方差矩陣。用于更新當(dāng)前時(shí)間步的內(nèi)部狀態(tài)估計(jì)的卡爾曼增益的計(jì)算方法是:
其中,Hk代表線性化狀態(tài)測(cè)量矩陣, R代表各傳感器j的傳感器噪聲協(xié)方差矩陣,Kk代表卡爾曼增益。最后,ε )是一組取決于某個(gè)傳感器測(cè)量是否存在故障的指示信號(hào),這一點(diǎn)將在殘差評(píng)估中進(jìn)一步解釋。對(duì)于下一個(gè)時(shí)間步,產(chǎn)生的殘差、狀態(tài)估計(jì)和它的協(xié)方差矩陣由以下公式預(yù)測(cè):
其中 rk表示創(chuàng)新殘余信號(hào)。注意這個(gè)殘差 rk被用作故障檢測(cè)指標(biāo),也就是說(shuō),殘差信號(hào)被用來(lái)檢測(cè)一個(gè)測(cè)量是否與預(yù)測(cè)的測(cè)量偏差太大。EKF算法到此結(jié)束。圖6給出了該算法產(chǎn)生的殘差的說(shuō)明性例子。在此,在RSU中注入偏置異常,可以觀察到RSU殘差對(duì)該偏置非常敏感。如前所述,EKF產(chǎn)生一個(gè)殘差信號(hào)(10),它給出了關(guān)于預(yù)測(cè)測(cè)量的偏差信息,該信息是根據(jù)預(yù)測(cè)狀態(tài) X?k]k - 1和測(cè)量模型與測(cè)量值 uk計(jì)算的。 需要進(jìn)行下一層剩余評(píng)估。
殘差評(píng)估是使用基于 c2準(zhǔn)則的檢測(cè)器完成的,其形式為:

其中算符。表示逐點(diǎn)Hadamard乘積。 由此產(chǎn)生的信號(hào)向量r r?k 的每個(gè)條目都與預(yù)先確定的正值閾值向量α (j) 進(jìn)行比較,其大小等于每個(gè)傳感器j每次測(cè)量的測(cè)量狀態(tài)數(shù)。隨后,給定一個(gè)預(yù)定的時(shí)間跨度n,使用指標(biāo)函數(shù)εk給出一個(gè)適當(dāng)?shù)姆磻?yīng):

其中i選擇測(cè)量狀態(tài)的索引。檢測(cè)到的故障的反應(yīng)直接出現(xiàn)在方程(8)和(9)中,在更新步驟(11)和(12)中,受影響的測(cè)量狀態(tài)不再被考慮在內(nèi)。然而,受影響的測(cè)量在(10)中被考慮到,以檢測(cè)故障是否仍然存在。
V.結(jié)果分析
如第三節(jié)所述,為了衡量異常檢測(cè)算法的性能,對(duì)不同大小和持續(xù)時(shí)間的異常情況進(jìn)行了模擬。對(duì)于瞬時(shí)異常,在0.1 m ~ 10 m范圍內(nèi),按照10個(gè)樣本的對(duì)數(shù)分布選擇異常大小exI 。瞬間異常的持續(xù)時(shí)間為d=0.05秒。這導(dǎo)致在瞬間異常的情況下,總共有10次測(cè)試來(lái)評(píng)估算法。
對(duì)于偏差異常,按照0.1米和3米之間的5個(gè)樣本的對(duì)數(shù)分布,選擇異常大小exB 。選擇一個(gè)對(duì)數(shù)分布來(lái)確定異常檢測(cè)器可以標(biāo)記哪個(gè)數(shù)量級(jí)的故障大小。此外,異常持續(xù)時(shí)間有如下變化:d = [0.25, 0.5, 1.0, 2.5] s。這導(dǎo)致了在有偏差故障的情況下,總共有20次測(cè)試來(lái)評(píng)估算法。對(duì)于漂移異常,通過(guò)遵循0.1米/秒和3米/秒之間的5個(gè)樣本的對(duì)數(shù)分布,再次選擇一個(gè)異常大小exD。此外,異常持續(xù)時(shí)間以以下變化再次變化:d = [0.25, 0.5, 1.0, 2.5] s。這導(dǎo)致在漂移故障的情況下,總共進(jìn)行了20次測(cè)試來(lái)評(píng)估算法。
A.統(tǒng)計(jì)結(jié)果
為了測(cè)試故障檢測(cè)算法的性能和可靠性,之前介紹的測(cè)試在仿真環(huán)境中在線應(yīng)用。初始狀態(tài)協(xié)方差矩陣和狀態(tài)選擇為P0=I, X?0=0. 測(cè)量噪聲協(xié)方差矩陣R從(8)中選擇,直接替換(1)中定義的測(cè)量噪聲的平方。來(lái)自(7)的過(guò)程噪聲協(xié)方差矩陣Q被選為 Q =0.001 ·I. 殘余評(píng)估范圍(13)被選為n =30,最后評(píng)估閾值(14)被選為所有位置狀態(tài) αx= αy = αθ = 0.18 ,所有速度狀態(tài) αv北= αv_ =αve = 0.7。這些閾值是以噪聲的大小為起點(diǎn),反復(fù)確定的。 使用這些參數(shù)和初始條件,結(jié)果在圖7中給出。這種類型的圖被解釋為如下;故障是以一定的幅度(Y軸)和一定的持續(xù)時(shí)間(X軸)注入一定的類型(偏壓、漂移或瞬間)。如果檢測(cè)到注入的故障(藍(lán)星),它被標(biāo)記為(紅圈)。如果在沒(méi)有注入故障的傳感器上檢測(cè)到故障,則被標(biāo)記為假陽(yáng)性(綠圈)。使用這種圖形表示法,觀察實(shí)際故障、是否被檢測(cè)到以及其他傳感器上是否發(fā)生任何誤報(bào)就變得簡(jiǎn)單明了。
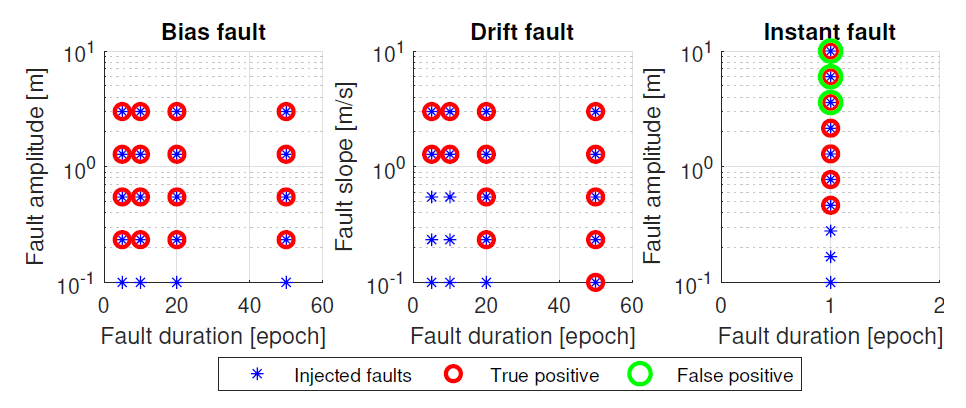
圖7. 故障檢測(cè)性能和假陽(yáng)性穩(wěn)健性的結(jié)果,72%真陽(yáng)性,6%假陽(yáng)性。
這些結(jié)果表明,故障檢測(cè)算法能夠檢測(cè)出72%的注入故障,其中在6%的測(cè)試案例中,在不同的傳感器測(cè)量狀態(tài)下也檢測(cè)出了假陽(yáng)性。 未檢測(cè)到的故障要么是最大值太低(閾值α的影響,防止殘差上的噪聲被歸類為故障),要么是故障持續(xù)時(shí)間太短(故障水平線n的限制效應(yīng))。在高振幅的故障中檢測(cè)到的假陽(yáng)性是由綜合的內(nèi)部估計(jì)值 X?k引起的,在它被忽略之前,由于故障的測(cè)量被推高了。這種現(xiàn)象導(dǎo)致內(nèi)部估計(jì)和健康傳感器之間的差異,因此有可能將它們歸類為故障。
B.失去傳感器冗余時(shí)的案例分析
第V-A節(jié)的結(jié)果表明,該算法能夠很好地檢測(cè)出超過(guò)某個(gè)不確定性閾值的故障。 這個(gè)由α決定的閾值可以設(shè)置得更低,但這是不可取的,因?yàn)檫@將損害魯棒性,因?yàn)闅堄嗟脑肼暱赡苷T發(fā)假陽(yáng)性。 然而,這也表明,該算法開(kāi)始檢測(cè)高故障振幅的假陽(yáng)性。由于EKF的糾錯(cuò)效應(yīng)以及殘差評(píng)估的估計(jì)范圍n,故障測(cè)量不是瞬間就能檢測(cè)出來(lái)的。因此,有缺陷的測(cè)量被用來(lái)在一定時(shí)間內(nèi)更新內(nèi)部狀態(tài)估計(jì)。
對(duì)于一個(gè)足夠高的故障,狀態(tài)估計(jì)暫時(shí)增加到這樣的程度,以至于非故障測(cè)量被認(rèn)為是錯(cuò)誤的,因?yàn)樗鼈兣c內(nèi)部狀態(tài)估計(jì)的差異。預(yù)計(jì)在失去傳感器冗余的情況下,這種影響會(huì)進(jìn)一步擴(kuò)大。為了測(cè)試這一假設(shè),在沒(méi)有激光雷達(dá)和雷達(dá)傳感器測(cè)量的情況下,使用與V-A節(jié)相同的初始條件和參數(shù),對(duì)矩陣進(jìn)行重新測(cè)試。
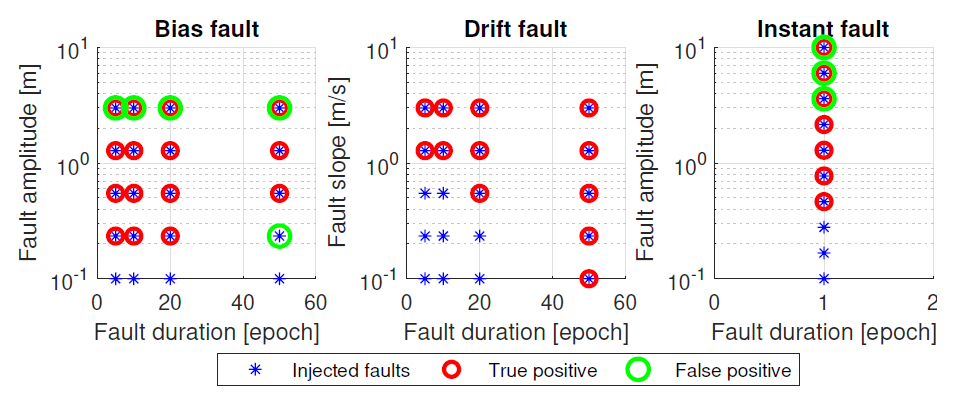
圖8. 在沒(méi)有雷達(dá)和激光雷達(dá)冗余的情況下,故障檢測(cè)性能和可靠性的結(jié)果,68%的真陽(yáng)性,22%的假陽(yáng)性。
這一分析的結(jié)果顯示在圖8中。在這里,人們可以觀察到假陽(yáng)性檢測(cè)的累積總和在增加。這可以解釋為只有兩個(gè)傳感器來(lái)構(gòu)建內(nèi)部狀態(tài)估計(jì)值X?k ,因此X?k 和健康測(cè)量值之間的誤差也會(huì)增加。然而,與完全冗余的情況相比,真陽(yáng)性的數(shù)量只減少了4%,這表明在失去冗余的情況下,該算法對(duì)真陽(yáng)性檢測(cè)的穩(wěn)健性。
C.討論
按照這里的定義,從外部傳感器檢測(cè)異常并不能提供信息,也不能確定故障的原因(即故障分類)。 這里的主要興趣是檢測(cè)故障,并作為一種緩解行動(dòng),不再將受影響的狀態(tài)納入傳感器融合中。 這取決于功能的安全關(guān)鍵性,是否應(yīng)該讓車輛的駕駛員知道故障的原因。
外部觀察到的物體,只是用車輛的傳感器和道路基礎(chǔ)設(shè)施的傳感器來(lái)觀察,而它的意圖和實(shí)際運(yùn)動(dòng)是未知的(這個(gè)外部物體上沒(méi)有傳感器)。這意味著,為了有一個(gè)可靠的故障檢測(cè)算法,需要一定程度的傳感器冗余,這是該算法的一個(gè)限制。 通過(guò)使用所有這些傳感器來(lái)預(yù)測(cè)外部觀察物體的相同內(nèi)部狀態(tài),內(nèi)部狀態(tài)的估計(jì)可以被一個(gè)具有足夠幅度的故障推離其真實(shí)軌跡。盡管如此,通過(guò)用預(yù)測(cè)或已知的外部觀察對(duì)象的意圖來(lái)增強(qiáng)模型,有可能規(guī)避這個(gè)問(wèn)題。
VI.結(jié)論和未來(lái)工作
這項(xiàng)工作的貢獻(xiàn)有兩個(gè)方面。這里介紹的異常檢測(cè)算法提供了從自動(dòng)駕駛車輛的角度,在啟用I2V的道路交叉口檢測(cè)不同類型攻擊的可能性。
結(jié)果表明,大多數(shù)相關(guān)的和有潛在危險(xiǎn)的異常情況都可以被檢測(cè)出來(lái),特別是在故障幅度有限且存在車內(nèi)傳感器冗余的情況下。此外,結(jié)果顯示了擁有傳感器冗余對(duì)物體追蹤的好處,以及不存在冗余時(shí)的局限性。這意味著自動(dòng)駕駛汽車即使在面對(duì)I2V網(wǎng)絡(luò)攻擊時(shí)也能保持安全和舒適的運(yùn)行。這種用于檢測(cè)I2V通信中的攻擊的方法,也可用于檢測(cè)車內(nèi)傳感器的異常情況,使用車內(nèi)和I2V傳感器數(shù)據(jù)的融合。
未來(lái)的工作包括擴(kuò)展到更多的場(chǎng)景,研究對(duì)網(wǎng)絡(luò)效應(yīng)(延遲、包裹掉落)的魯棒性,納入更多的I2V信號(hào)(如交通燈信息),以及將EKF異常檢測(cè)方法與車輛控制緩解策略相結(jié)合,以應(yīng)對(duì)可以檢測(cè)到異常的情況。 此外,可以考慮用數(shù)據(jù)驅(qū)動(dòng)的方法進(jìn)行擴(kuò)展,以提高大故障振幅情況下的假陽(yáng)性和假陰性率。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2563文章
52589瀏覽量
763763 -
卡爾曼濾波器
+關(guān)注
關(guān)注
0文章
54瀏覽量
12337 -
自動(dòng)駕駛汽車
+關(guān)注
關(guān)注
4文章
380瀏覽量
41218 -
LSTM
+關(guān)注
關(guān)注
0文章
60瀏覽量
3977
原文標(biāo)題:從基礎(chǔ)設(shè)施到自動(dòng)駕駛汽車的網(wǎng)絡(luò)威脅異常檢測(cè)
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
蘿卜快跑在香港的自動(dòng)駕駛測(cè)試區(qū)域再擴(kuò)大
新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角
吉利汽車自動(dòng)駕駛脫困專利獲授權(quán)
從《自動(dòng)駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動(dòng)駕駛中的重要性

自動(dòng)駕駛測(cè)試在設(shè)計(jì)環(huán)節(jié)中有何關(guān)鍵作用?
自動(dòng)駕駛中常提的SLAM到底是個(gè)啥?

MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
智能駕駛所需的基礎(chǔ)設(shè)施
智能駕駛與自動(dòng)駕駛的關(guān)系
連接器在高性能車輛系統(tǒng)中的作用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論