 一種具有機械門控電子通道的機器人皮膚(R-skin)
一種具有機械門控電子通道的機器人皮膚(R-skin)
類似人類的觸覺對于提升機器人智能至關重要。然而,再現人類皮膚的切向“滑動”感知仍在研究中。
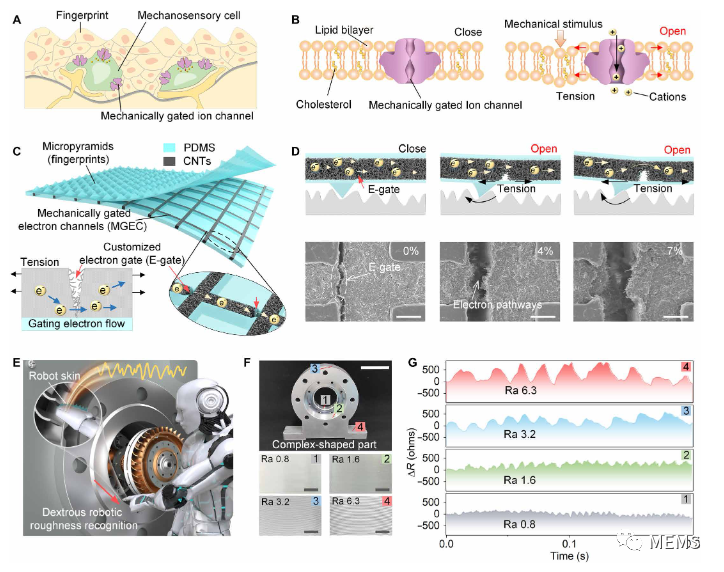
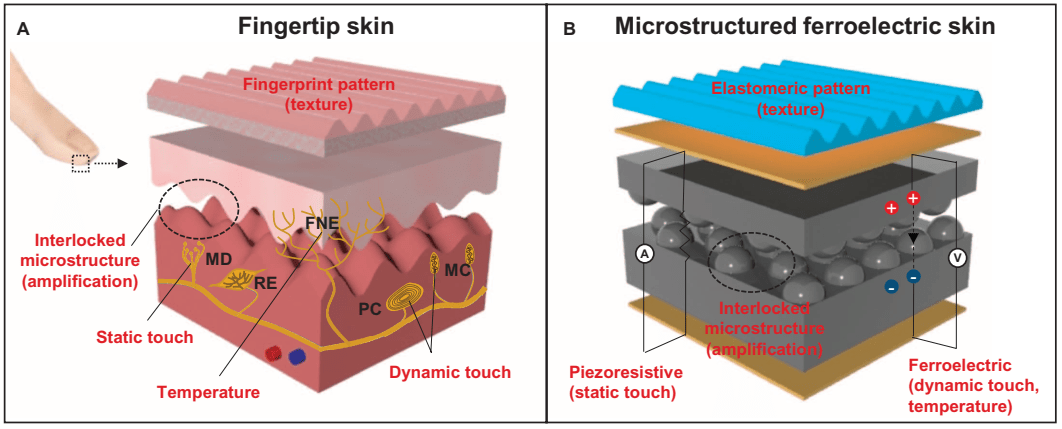
近日,西安交通大學邵金友教授、Xiaoliang Chen受機械感覺細胞的側向門控機械感覺機制(通過側向張力誘導離子通道的開閉來感知機械刺激)的啟發,報道了一種具有機械門控電子通道的機器人皮膚(R-skin),通過金字塔人工指紋觸發的電子門(E-gates,即嵌入網狀電子通道內的定制V形裂縫)的開閉來實現超靈敏和快速響應的滑動觸覺感知。
文章要點
1)通過模仿細胞膜來調節膜力學,局部應變在E-gate處被增強以有效地調節電子路徑以獲得高靈敏度,而在其他位置被削弱以抑制隨機裂縫以獲得魯棒的穩定性。
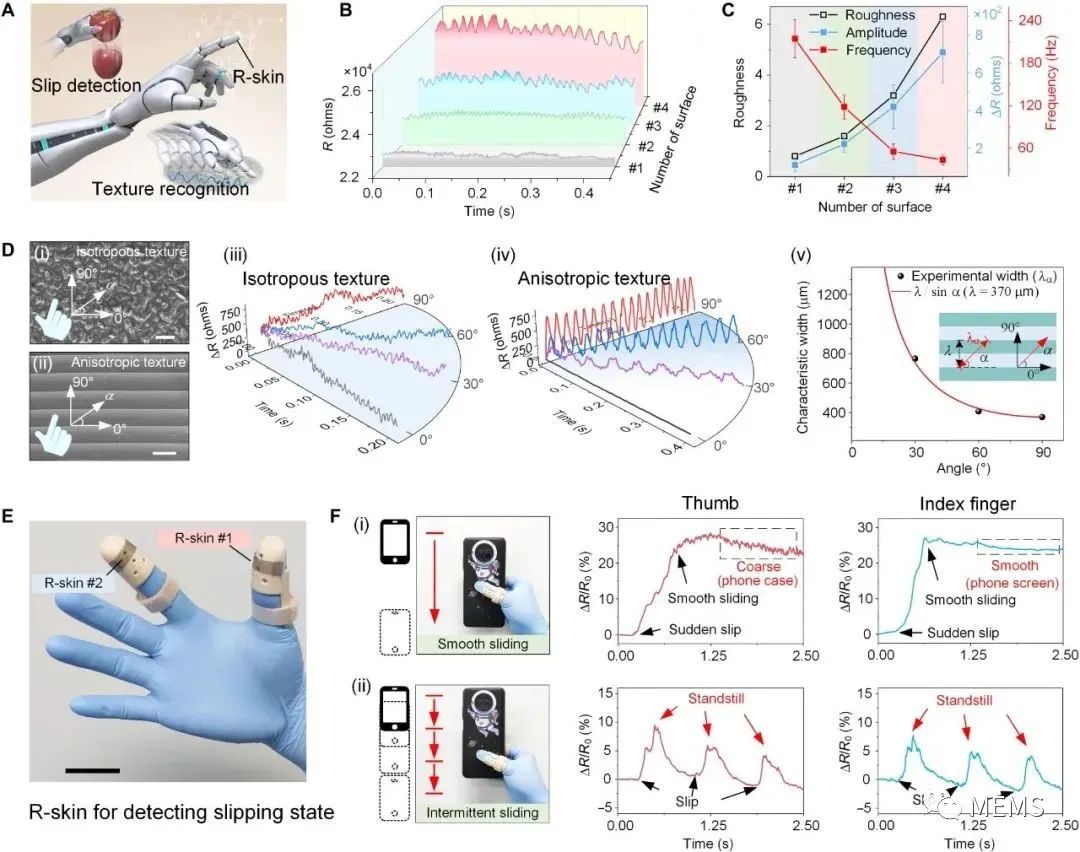
2)R-skin可以在超過人類的響應頻率(485 Hz)下直接識別超細表面微結構(5 μm),并實現類似人類的滑動感知功能,包括靈巧地辨別復雜形狀物體的紋理,并為抓握提供實時反饋。
論文信息:
DOI: 10.1126/sciadv.ade0720
審核編輯 :李倩
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29549瀏覽量
211853 -
仿生機器人
+關注
關注
1文章
74瀏覽量
15545
原文標題:一種具有用于滑動觸覺感知的機械門控電子通道的仿生機器人皮膚
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系
發表于 04-25 17:59
央視:機器人“電子皮膚”訂單爆發式增長,墨現科技24小時趕工
4 月 21 日消息,據央視新聞報道,從小眾產品到機器人的剛需,電子皮膚應用快速增長,生產研發也在提速。記者在廣東和浙江走訪中了解到,目前我國在電子

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
的局限性以及衡量大模型的關鍵指標。閱讀了該部分后,我感受到了一種前所未有的震撼,這種震撼不僅來源于技術本身的先進性,更來源于它對傳統機器人控制方式的顛覆。
傳統機器人的局限性與大模型的變革
傳統的
發表于 12-29 23:04
Nat. Commun.:受象鼻魚啟發的電子皮膚,用于主動非接觸式三維跟蹤和傳感
獵物。本文亮點1. 本工作報告了一種非接觸式位置定位概念,該概念由具有三維傳感能力的透明薄軟電子皮膚 (E-skin) 實現2. 受象鼻魚主
吉林大學:研究具有3D力檢測功能的自供電柔性電子皮膚觸覺傳感器
背景介紹 仿生功能電子技術是朝著開發與現實世界環境無縫集成的智能技術邁出的重要一步。受人類皮膚感官功能的啟發,模仿人類皮膚特征的柔性傳感器在商業開發和研究領域都引起了廣泛關注,
安泰功率放大器在介電材料電子皮膚研究中的應用
介電材料電子皮膚作為一種新型智能材料,具有出色的傳感性能和適應能力,在人機交互、仿生機器人和醫療等領域展示了廣闊的應用前景。然而,其性能的進
工業機器人和機械臂的設計、功能和應用有哪些區別?
機械臂是一種由多個關節連接而成的機械結構,類似于人的胳膊。它通常具有可旋轉或可伸縮的關節,使其能夠在空間中執行精確的定位和操作。機械臂通常由


電子皮膚:引領服務機器人進入觸覺新時代
隨著技術的不斷成熟和完善,我們有理由相信,電子皮膚將成為服務機器人領域的一項革命性技術,為人類社會帶來更多的福祉和希望。

大象機器人開源協作機械臂機械臂接入GPT4o大模型!
和智能化的任務,提升了人機協作的效率和效果。我們個人平時接觸不太到機械臂這類的機器人產品,但是有一種小型的機械臂我們人人都可以擁有它myCobot,價格低廉的

abb機器人的基本配置包括哪些
ABB機器人是一種廣泛應用于工業自動化領域的智能設備。它具有高度的靈活性、可靠性和精確性,可以完成各種復雜的任務。為了實現這些功能,ABB機器人需要進行基本配置。以下是ABB





 工商網監
工商網監
評論