 如何為無線狀態監控系統選擇最佳MEMS傳感器
如何為無線狀態監控系統選擇最佳MEMS傳感器
作者:Chris Murphy和Richard Anslow
本系列文章的第 1 部分將討論選擇適合在惡劣射頻環境中使用的合適 MEMS 傳感器和無線收發器的一些設計考慮因素。本文介紹了Voyager平臺,這是一個強大的低功耗無線網狀振動監測平臺,使設計人員能夠將無線解決方案快速部署到機器或測試設置中。本系列文章的第 2 部分將介紹 Voyager 可以檢測到的不同故障,例如不平衡、不對中和軸承缺陷。本系列文章的第3部分將詳細介紹實際的功率性能,以及高數據速率和超低功耗模式之間的幾種不同工作模式。
介紹
MEMS加速度計的性能最近已經發展到可以與無處不在的壓電振動傳感器競爭的程度。這些MEMS振動傳感器具有低功耗、更小尺寸、更高集成度和寬帶寬以及低于100 μg/√Hz的噪聲水平等關鍵優勢,這意味著它們為維護和設施工程師開辟了一種全新的基于狀態的監控(CbM)范式,以檢測、診斷、預測并最終避免機器故障。由于MEMS加速度計的超低功耗,有線系統現在可以用無線解決方案取代,單軸笨重的壓電傳感器可以用小型輕量級三軸模擬元件代替,并且現在可以以經濟高效的方式連續監控更廣泛的機器。
煤層氣的趨勢
有數以百萬計的電動機在連續運行,消耗全球約45%的電力。1其中大多數關鍵電機可能由有線CbM系統監控。根據一項研究,82% 的受訪公司經歷過計劃外維護,每小時成本高達 250,000 美元。對于那些經歷過計劃外停機的公司來說,根據平均兩次停機事件,中斷平均持續四個小時,平均損失 200 萬美元。2
另一項研究發現,70%的公司不知道資產何時需要進行維護或升級工作。這種意識的缺乏加上停機的成本正在推動公司走向數字化,大約50%的公司計劃投資數字孿生和人工智能(AI)。3隨著大規模邁向工業4.0,組織正在研究工業領域的數字化,以提高生產力和效率。
這一運動的一個關鍵方面是無線傳感器系統的趨勢。未來幾年,CbM行業將出現顯著增長,其中無線安裝占這一增長的很大一部分。4據估計,到2030年,全球智能制造將部署近50億個無線模塊。5眾所周知,最關鍵的資產需要有線CbM系統,但是目前部署的所有其他資產呢?對于一些棕地站點,安裝有線解決方案是不可行的,從而產生了對無線CbM解決方案的需求。
煤層氣系統安裝與維護
有線 CbM 系統提供最佳性能、可靠性、速度和安全性,因此部署在最關鍵的資產上。由于這些優勢,有線系統仍然更有可能部署在綠地站點。安裝有線CbM系統時,電纜可能必須穿過工廠車間,這可能很困難,尤其是當某些機器不能受到干擾時。200 英尺(60 米)電纜通常用于工業有線傳感器網絡,單次運行的成本從 3000 美元到 20,000 美元不等,包括材料和人工。6在某些情況下,需要線束,這增加了額外的復雜性,并且安裝起來可能非常耗時。如果電纜通過現有基礎設施布線,則如果電纜損壞或需要升級,則可能無法更換或重新布線。
雖然無線系統最初可能看起來更昂貴,但更簡單的維護程序加上易于擴展可以在CbM系統的整個生命周期內節省大量成本。更少的維護路線、更少的布線和相關硬件都可以節省成本。根據所需的報告級別,電池可以使用數年。如果可以部署基于能量收集的無線系統,維護將變得更加容易和便宜。一旦選擇了無線系統,下一個要關注的領域是哪種技術最適合您的CbM應用?
無線傳感器網絡比較
盡管無線網絡已經部署了幾十年,但由于低功耗技術的進步以及對苛刻射頻干擾的免疫力,它們直到最近才在工廠車間得到廣泛部署。本節將討論各種網狀網絡的優點。
網格技術
有幾種常見的技術可以創建低功耗,低數據速率的網絡,例如低功耗藍牙,Zigbee和6LoWPAN。如果您想開發一個密集的無線傳感器節點集群,在短距離內傳輸相對較少的數據,就像您在工廠車間所期望的那樣,那么這些低數據網狀網絡或多對多網絡技術之一是一個不錯的選擇。?
網狀網絡可用于基礎設施節點,并相互無線連接,如圖1所示。這些節點可以幫助彼此擴展無線電信號,甚至在兩個特定節點之間的通信鏈路受到干擾或噪聲干擾時重新路由無線電信號。網狀技術最重要的特征之一是能夠通過網絡中的其他微塵將數據從一個微塵發送到另一個微塵,從而能夠創建覆蓋大面積且功耗極低的互連設備的大型網絡。例如,在圖 1 中,Mote 1 和 Mote 3 之間的距離意味著它們無法直接通信。但是,Mote 1 可以通過 Mote 2 將數據傳輸到 Mote 3,而無需在 Mote 1 和 Mote 3 之間建立直接鏈接。
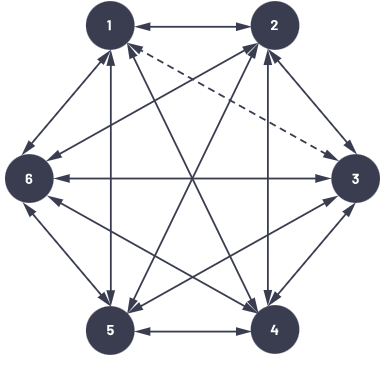
圖1.網狀網絡中顯示多對多通信的微塵集群示例。
這些數據需要傳輸到Mote 6,但距離超出了收發器的能力。將數據直接從 Mote 1 傳輸到 Mote 6 需要更高的發射功率和更高的接收器靈敏度。較高的發射功率通常與較高的峰值電流消耗有關,并且需要更大的電池。使用網狀網絡,可以將此數據沿著每個微塵從 1 跳到 6。每個設備在較小范圍內傳輸所需的功率遠遠小于在整個工廠車間形成直接、更遠距離無線鏈路所需的功率。
網狀網絡的主要優點如下:
自我配置:隨著工業4.0成為現實,工廠經理正在尋求更好的績效,因為他們的企業變得更加數字化。這種搜索的一個重要方面是能夠在較小的地理位置上添加高密度的無線設備集群,同時保持高度可靠的性能(在某些情況下幾乎與有線系統一樣好),幾乎不需要手動配置,因為微塵會自行配置。
自我修復:網狀網絡不斷路由數據,因此經常受到來自工廠車間的噪聲、干擾、多徑、衰落反射等干擾。SmartMesh IP 系統(管理器和節點)始終了解每個節點的噪聲水平,并共享此數據以將信號重新路由到遠離潛在噪聲路徑的位置。?
覆蓋范圍:只需添加或刪除微塵即可輕松修改網絡大小。如圖2所示,可以輕松擴展覆蓋范圍,而不會遭受無線設備的額外功耗。
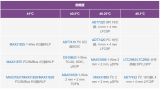
表 1 總結了網格技術及其功能。
| 特征 | 無線網絡 | 唔唔?? | 齊格比 | 6基于LoWPAN的網格 |
| 權力 | 小時 | 月份 | 月/年 | 年 |
| 節點 | 32 | 32,767 | 64,000 | 100/50,000 |
| 范圍 (P2P) | 100米 | 10 米 | 最高 300 m | 最高 300 m |
| 數據速率 | 11 Mbps 至 300 Mbps | 1 兆字節 | 250 千字節 | 250 千字節 |
| 信道跳頻 | ? | ? | ? | ? |
| 碰撞緩解 | ? | ? | ? | ? |
| 自我修復 | ? | ? | ? | ? |
| 99.999% 可靠性 |
? |
? |
? |
? |
其他低功耗無線技術
LoRa 或 LoRaWAN 可以在長距離內實現低數據速率通信, 長達 6 英里, 同時消耗很少的功率.它基于各種頻段,實現點對點通信。因此,對于低功耗、長距離點對點通信,這些解決方案是理想的選擇。NB-IoT或蜂窩網絡實施起來更昂貴、更復雜,并且比網狀技術消耗更多的功率,同時傳輸的數據量更少。但是,它確實提供了高質量的蜂窩服務和對云的直接訪問。如果您的無線解決方案需要與Zigbee相比具有更高數據速率的長距離蜂窩接入,那么LTE-M可能值得考慮。
MEMS取代壓電振動傳感器的演變
直到最近,MEMS傳感器還不足以與IEPE振動傳感器競爭,檢測關鍵資產和旋轉機械的早期振動故障特征,如圖3所示。MEMS傳感器的主要限制是噪聲、帶寬和g范圍。低噪聲是檢測低水平振動的關鍵,有可能實現早期故障檢測甚至預測。帶寬是關鍵,因為許多資產/電機故障(如氣蝕、軸承問題和齒輪嚙合)通常在頻率高于 5 kHz 時最早發生,當然時間對于檢測故障至關重要。g范圍很重要,因為較大的資產會產生高達數百g的沖擊或沖擊,可能會破壞專為不太苛刻的操作而設計的MEMS傳感器。
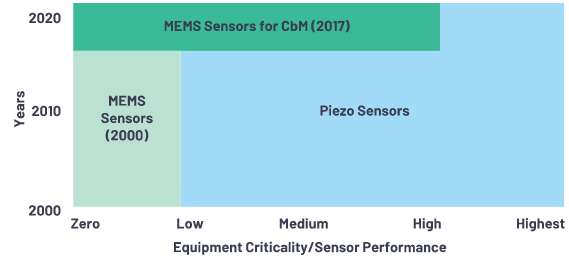
圖3.用于CbM應用的MEMS性能的演變。
從歷史上看,大多數MEMS傳感器是為多種應用而設計的,因此通常不會具有多個特定于應用的功能,而CbM至少需要三個功能。 汽車碰撞檢測MEMS傳感器是單個高級功能應用特定部件的一個很好的例子。它們設計為具有高g范圍,但帶寬和/或噪聲不足,無法用于CbM和許多其他應用。開發適用于CbM應用的MEMS傳感器非常困難,這就是為什么迄今為止很少有供應商成功的原因。
為了突出CbMMEMS性能的這些進步,對2010年和2017年發布的兩款單軸模擬輸出MEMS振動傳感器進行了比較,如表2所示。兩款MEMS加速度計均設計用于CbM應用中的振動檢測。雖然兩個傳感器的帶寬都相當高,但噪聲改善最為顯著,以至于MEMS傳感器現在可以與壓電IEPE振動傳感器競爭。
| 規范 | 2010 ADXL001 | 2017 ADXL100x | 改進 |
| 不。軸 | 1 | 1 | — |
| g范圍 | ±70/±250/±500 | ±50 至 500 | — |
| 帶寬(千赫) | 10 | 11 | — |
| 諧振(千赫) | 22 | 21 | — |
| 噪聲密度 | 4 米克/√赫茲 | 25 μ克/√赫茲 | 160× |
| 跨軸靈敏度 | 2% | 1% | 2× |
| 溫度范圍 | –40°C 至 +125°C | –40°C 至 +125°C | — |
| 功耗(毫安) | 2.5 | 1 | 2.5 倍 |
| 待機電流(毫安) | — | 0.225 | — |
這些噪聲改善也在一些高性能工業三軸MEMS傳感器上實現,如表3所示。雖然這些傳感器并非專門設計用于振動檢測,但它們是性能極高的MEMS傳感器,能夠在全帶寬下檢測低于1 mg rms的振動。結合出色的穩定性和可靠性,這些傳感器已被證明在各種機械的CbM應用中非常有效,無論是作為唯一的振動傳感器還是與其他寬帶寬MEMS / IEPE傳感器配對。超低噪聲、窄帶寬 (<5 kHz) MEMS傳感器在檢測許多資產的振動方面發揮著關鍵作用,通常在轉速低且亞赫茲或直流響應有利的情況下,例如造紙/工廠加工、食品/制藥、風力發電和金屬加工行業。表3突出顯示了2009年至2017年多軸MEMS傳感器性能的改進。應該注意的是,在實現更寬的帶寬、更低的噪聲和更高的g范圍時,與更通用的MEMS傳感器相比,待機電流等規格將更大。
| 規范 | 2009 ADXL345 | 2017 ADXL356 | 改進 |
| 不。軸 | 3 | 3 | — |
| g范圍 | 2/4/6/8/16 | ±40 | 2.5× |
| 帶寬(千赫) | 1.6 | 2 到 3 | 1.25× 到 2× |
| 諧振(千赫) | 5.5 | 5.5 | — |
| 噪聲密度 |
3米克/√赫茲 3.9米克/√赫茲 |
80 μ克/√赫茲 | 37× 至 49× |
| 跨軸靈敏度 | 1% | 1% | — |
| 溫度范圍 | ?40°C 至 +85°C | ?40°C 至 +125°C | 25%× |
| 功耗 (μA) | 140 | 150 | — |
| 待機電流 (μA) | 0.1 | 21 | 210× |
CbM系統中常用的振動傳感器級別是多少?
由于計劃外停機而損失大量收入的公司將繼續依賴有線解決方案,因為它們基于12位至20位分辨率傳感器提供最可靠和最準確的性能。此外,有線安裝的較高成本很容易證明是合理的。對于低關鍵性資產,性能要求并不那么嚴格,資本支出限制可能會更低。10 位到 16 位的振動傳感器分辨率是可以接受的,這是目前大多數基于 MEMS 的無線 CbM 系統所涵蓋的范圍。
對低關鍵性資產的高性能振動傳感的需求不斷增長,隨著工業公司尋求數字化和加強其提高性能、生產和效率的努力,這一趨勢繼續增長。從歷史上看,成本一直是在低臨界資產上使用壓電振動傳感器的限制因素,但隨著越來越多的設計人員意識到MEMS傳感器在這種情況下可以提供的價值和靈活性,這種情況現在開始改變。圖4顯示了從10位到24位的潛在振動傳感器分辨率。盡管MEMS的分辨率明顯較低,但性能與成本節約的吸引力足以證明監控中低關鍵性資產是合理的。
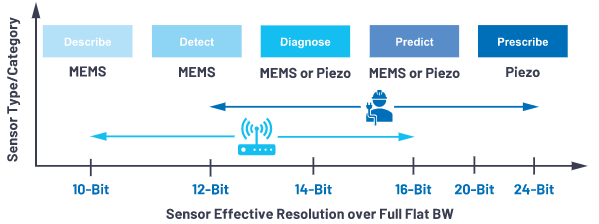
圖4.傳感器類型和相應的分辨率。
MEMS傳感器的主要優勢之一是功耗低,通常在μA范圍內,但甚至可以達到nA范圍。這使得它們非常適合用于無線CbM應用。雖然一些壓電傳感器的功耗低至200 μA左右,但它們缺乏集成功能,并且與MEMS相比價格昂貴。確實存在一些基于壓電傳感器的專用無線振動傳感器,它們可以在高達104 kHz的采樣速率下提供24位分辨率,但與MEMS解決方案相比,電池壽命非常有限。這種無線振動傳感器系統通常具有8小時的連續電池壽命。MEMS的另一個關鍵優勢是,您最多可以將三個軸集成到一個小封裝中。三軸壓電傳感器將更昂貴、更大,并且需要更多的信號調理電路,這使得它們更不適合無線應用。
未來趨勢:對新收入來源的渴望
泵占目前部署在世界各地工廠的旋轉機器的很大一部分,預計到 2025 年,全球市場將從 38.34B 美元增長到 46.92B 美元。7其中一些泵對于確保過程可以繼續暢通無阻地運行至關重要,這將需要基于狀態的監控以避免計劃外停機。這種泵的未來會怎樣?根據Frost&Sullivan最近的一份報告,泵將采用分析功能并變得智能。泵OEM的增長將由基于分析、人工智能或機器學習(ML)的服務推動,以提供有關提高泵性能和可靠性的診斷信息。研究發現,到2025年以后,高達60%的泵OEM收入可能來自與服務相關的活動,這些活動可能會使泵行業從基于產品的模式轉變為基于服務的模式。7這種轉變主要是由制造業的快速數字化(IIoT)以及CbM硬件和算法,AI和ML的進步推動的。據設想,水/廢水處理廠、煉油廠和天然氣生產廠等傳統重工業將在尋求數字化運營時利用這些智能泵。對于綠地,很可能會使用有線煤層氣系統,但棕地上的現有裝置呢?為了將這種基于服務的模型應用于已部署的泵和其他旋轉機械,無線CbM系統可以提供快速,無縫和可靠的解決方案。
EV-煤層氣-航海家3-1Z無線CbM模塊
Voyager平臺是一個強大的低功耗無線網狀振動監測平臺,使設計人員能夠將無線解決方案快速部署到機器或測試設置中。設計人員可以快速評估用于振動監控的ADI MEMS傳感器技術,同時評估用于工業無線檢測的SmartMesh IP技術。總體目標是加速客戶資產監控和解決方案開發。該微塵包括一個機械外殼和帶有 1/4-28 行業標準螺柱附件的附件硬件。Voyager解決方案可以很容易地直接安裝在電機或測試夾具上。
智能網狀網絡
SmartMesh IP 無線傳感器網絡產品是 IC 和預認證的 PCB 模塊,配有網狀網絡軟件,使傳感器能夠在惡劣的工業物聯網 (IIoT) 環境中進行通信。它們專為 IP 兼容性而構建,基于 6LoWPAN 和 802.15.4e 標準。6LoWPAN 由互聯網協議版本 6 (IPv6) 和低功耗無線個人局域網 (LoWPAN) 組成。它是一個基于互聯網協議(IP)的網絡,如Wi-Fi。SmartMesh IP 產品線即使在惡劣、動態變化的射頻環境中也能實現低功耗和 >99.999% 的數據可靠性。
高度可擴展、自形成無線節點的多跳網狀網絡,這些網絡收集和中繼數據,并結合了監控性能和安全性并與主機應用程序交換數據的網絡管理器。當管理器和微塵通電時,網格會自動形成。位于管理器范圍之外的微塵將通過范圍內的微塵轉發數據包。此外,如果節點的通信鏈路因噪聲而受到干擾,則可以使用另一個不同工作頻率的鏈路/路徑重定向數據/數據包,以便數據可以在干擾源周圍或遠離干擾源進行重定向,這就是SmartMesh IP的自愈元件或類似電線的可靠性(99.999%)的來源。
Voyager套件已經過SmartMesh IP微塵跳躍測試。這是超出網絡管理器范圍的微塵可以在范圍內微塵中跳躍的地方,如圖 6 所示。多跳網絡確保超出范圍的微塵可以將數據流式傳輸到網絡管理器。
智能網格 IP 最適合哪些領域?
SmartMesh IP網絡定位于IIoT應用。在出廠設置中,傳感器通常以集群形式部署在資產上。需要定期甚至持續監控的資產可以放置在工廠車間的不同位置,但在大多數情況下,它們之間的距離不會超過 100 米。例如,SmartMesh IP 已成功部署在高密度群集中數據中心的數千個節點中。
過去,低功耗無線通信設備一直在努力應對工廠車間產生的干擾。這不僅是 SmartMesh IP 擅長的領域,而且是專門為部署在需要類似有線可靠性且需要同步監視或控制的密集集群中而設計的。
SmartMesh IP網絡使用時間同步信道跳頻(TSCH)鏈路層進行通信,這是ADI公司SmartMesh IP團隊開創的技術,也是無線HART(IEC 62591)和IEEE 802.15.4e等無線網狀網絡標準的基礎構建模塊。在TSCH網絡中,網絡中的所有微塵都在幾微秒內同步。網絡通信按時隙進行組織,可實現低功耗數據包交換、成對信道跳頻和全路徑分集。TSCH的使用允許SmartMesh IP設備在計劃通信之間以超低功耗休眠,通常導致占空比為<1%。網絡管理器利用 TSCH 來確保微塵準確地知道何時說話、傾聽或睡眠。這可確保網絡上沒有數據包發生沖突,并且每個節點的功耗都非常低 — 路由節點通常消耗 <50 μA。
智能網狀 IP 網絡是最安全的網狀網絡之一。SmartMesh IP 網絡中的所有流量都受到端到端加密、消息完整性檢查和設備身份驗證的保護。此外,SmartMesh 網絡管理器包含支持網絡安全加入、密鑰建立和密鑰交換的應用程序。
旅行者號信號鏈
它還包括一個3軸ADXL356振動傳感器板和一個低功耗微控制器ADuCM4050。一個強大的低功耗 SmartMesh IP LTC5800 板包含在芯片天線中。該套件包括一個SmartMesh IP USB加密狗,用作無線網絡的網絡管理器。嵌入式固件和 GUI 代碼可在 GitHub 上找到。
Voyager模塊的電池壽命是一個關鍵的設計特性,因此,選擇了高性能、低功耗器件來檢測、調節、處理和傳輸振動數據,如圖9和圖10所示。
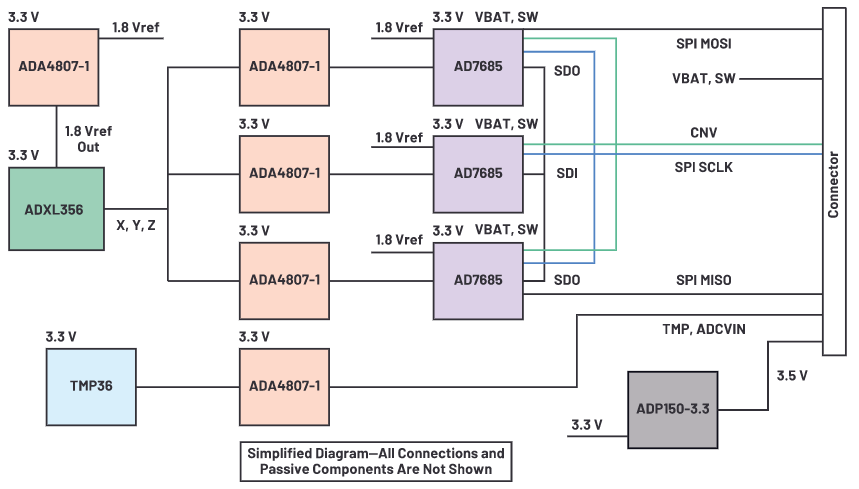
圖9.ADXL356信號鏈的高級框圖
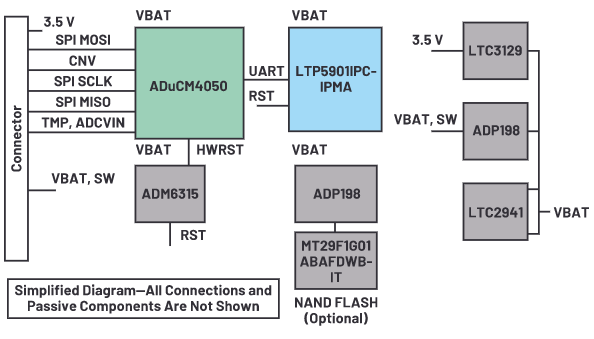
Figure 10. A high level block diagram of the ADuCM4050/SmartMesh.
Voyager Signal Chain Power Consumption
每個信號鏈部分的有功和待機功耗(取自數據手冊的最差情況性能)分別如圖11和圖12所示。請注意,這不包括 SmartMesh IP 收發器,因為它的消耗比簡單地處于活動或待機模式更微妙。信號鏈的實際功耗會更低。在活動模式下,ADuCM4050消耗的功耗最高,因為它采樣高達1.8 MSPS的振動數據,對其進行濾波,然后執行DFT,然后通過UART將數據發送到SmartMesh IP收發器。
圖11和圖12顯示,當系統傳輸數據和待機模式時,MEMS加速度計的活動和待機電流非常重要。無論您計劃運行定期監控方案(例如,每 6 小時一次)還是連續監測方案,這些指標對于確保電池供電的傳感器有效運行都至關重要。在有源模式下,ADXL356功耗約為信號鏈功耗的1.4%。與典型的壓電傳感器相比,ADXL356的功耗要低得多。典型的壓電傳感器具有4 mA恒定電流和24 V至30 V電源,功耗接近100 W。有低功耗的壓電傳感器可以降低90%的功耗,但它們仍然不適合在電池供電的傳感器網絡中長期使用。
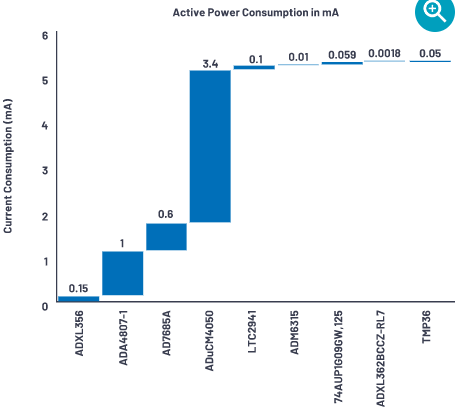
圖 11.有源模式下的信號鏈功耗。
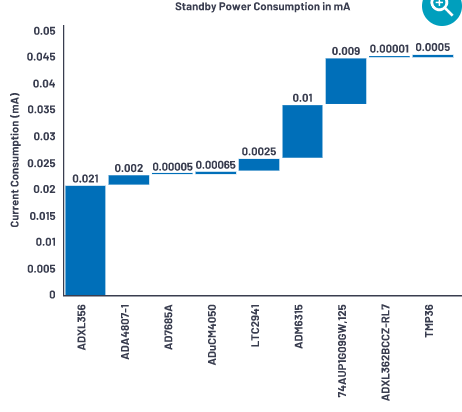
圖 12.待機模式下的信號鏈功耗。
在待機模式下,ADXL356消耗39%的信號鏈電流。雖然這看起來很高,但應與適用于CbM應用中振動檢測的各種MEMS傳感器進行比較和鑒定,如表4所示,以便更好地了解噪聲與電流消耗方面的性能權衡。
| ADXL356 | 微機電系統 B | 微機電系統 C1 | 微機電系統 C2 | 微機電系統 C3 | 微機電系統 C4 | |
| 不。軸 | 3 | 3 | 3 | 3 | 3 | 3 |
| 有功電流 | 150 微安 | 1.3毫安 | 239 微安 | 239 微安 | 310 微安 | 145 微安 |
| 計算占有效信號鏈總消耗的百分比 | 1.40% | 12.30% | 2.30% | 2.30% | 2.93% | 1.40% |
| 待機電流 (μA) | 21 | 16 | 0.5 | 0.5 | 5 | 0.9 |
| 計算出待機信號鏈總功耗的百分比 | 39% | 30% | 0.93% | 0.93% | 9.30% | 1.70% |
| g范圍 | ±40 | ±2, ±4, ±8, ±16 | ±16 | ±64 | ±20 | ±8, ±16, ±32 |
| 帶寬(千赫) | 1.5 | 6.3 | 4.2 (2.9) | 4.2 (2.9) | 8.2/8.5/5.6 | 8 (5.1) |
| 噪聲密度 (μg/√Hz) | 80 | 75 (110) | 130 | 300 | 675 | 630 |
圖13和圖14顯示了MEMS傳感器在活動和待機模式下的電流消耗和噪聲。ADXL356的有源電流消耗與MEMS C4一樣最低,不再推薦用于新設計。MEMS B具有最高的有源功耗(是ADXL356的11.5倍),但應該注意的是,MEMS B具有最低的噪聲和寬帶寬,因此與所有MEMS C傳感器相比,性能更高。
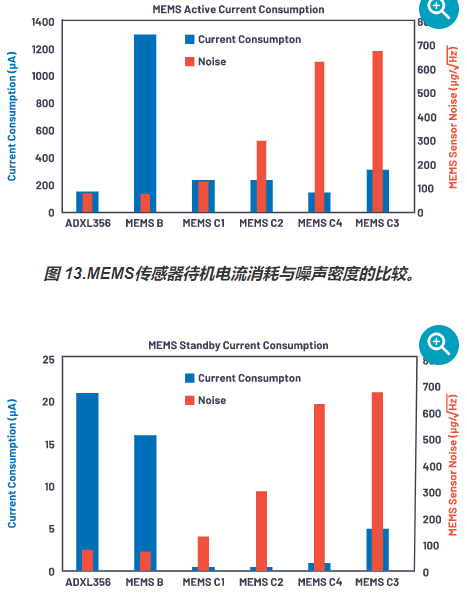
圖 14.MEMS傳感器有源電流消耗與噪聲密度的比較。
雖然ADXL356和MEMS B具有最高的待機電流,但這些傳感器的噪聲性能比圖14所示的替代產品好1.6至9倍。電流消耗和噪聲密度之間的反比關系顯而易見,在為電池供電應用選擇MEMS振動傳感器時應考慮這一點。
ADXL356的另一個關鍵優勢是其陶瓷封裝,在整個溫度范圍內具有出色的穩定性和性能。當您考慮到大多數設計用于無線設備的MEMS傳感器將被添加到IP6x等級的外殼中時,這一點變得至關重要。在某些情況下,外殼將包括灌封化合物。陶瓷封裝可以承受灌封化合物帶來的外力,以保持傳感器的數據手冊性能。對于塑料封裝MEMS器件,并不總是建議灌封,因為封裝的偏轉會降低傳感器的性能。
MEMS導通/上電時間
對于MEMS傳感器,上電時間是指從斷電到待機模式所需的時間。開啟或啟動時間是指從待機模式到測量模式所需的時間,如表5所示。對于ADXL356,當輸出在最終值的5 mg以內時,此規格有效。
| 部件號 | 上電/啟動時間 | 開啟時間 | 評論 |
| ADXL356 (毫秒) | <10 | <10 | 典型 |
| 微機電系統 B (毫秒) | 10 | 典型 | |
| 微機電系統 C1 (毫秒) | 20 到 50 | 2 到 1300 | 最小值/最大值 |
| 微機電系統 C2 (毫秒) | 20 到 50 | 2 到 1300 | 最小值/最大值 |
| 微機電系統 C3 (毫秒) | 0.1 |
模擬輸出: 5 × R × C |
|
| 微機電系統 C4 (毫秒) | 20 到 50 | 2 到 1300 | 最小值/最大值 |
在監控關鍵設備時應考慮這些時間,因為如果開啟時間太長,當系統從待機狀態進入測量模式時,可能會丟失關鍵的振動數據。在無線節點循環電源以節省功耗的系統中,在電源模式之間轉換時的功耗變得更加重要。考慮到表5所示的導通時間,當MEMS C1、MEMS C2和MEMS C4在超過1.3秒的最壞情況下測量有效數據時,其他傳感器已經進行了測量并處于待機模式相當長的時間,從而節省了更多功耗。圖15比較了ADXL356、MEMS B和MEMS C1從待機模式過渡到測量模式時的情況,測量加速度數據1 s,假設在此轉換期間出現線性功率斜坡,然后在4.5 s的時間內返回待機模式。盡管MEMS B具有更快的上電/啟動時間,但1 s測量的有源電流消耗明顯高于ADXL356。同樣,MEMS C1在最壞情況下需要長達1.3秒才能進入測量模式,這意味著它必須保持更長時間才能測量與ADXL356和MEMS B相同的數據,從而有效地消耗更多功率,如表6所示。如果MEMS B和ADXL356以MEMS C1的最差情況速度測量數據,則兩個器件在55%的時間內都可以保持待機模式,而MEMS C1只能進入此模式幾毫秒。
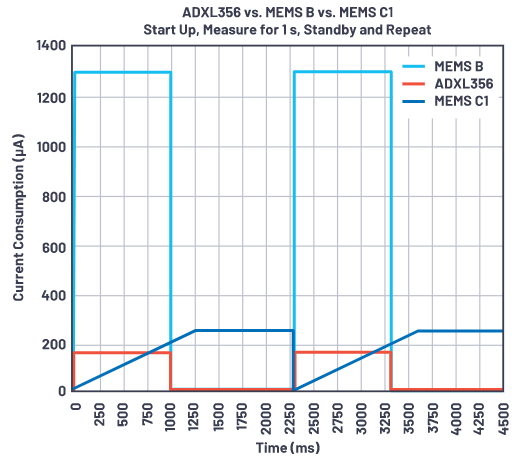
圖 15.ADXL356、MEMS B和MEMS C1在啟動時的電流消耗,然后在4.5 s內重復兩次MEMS C1在最差情況下啟動時間的1 s測量。
| 微機電系統 B | ADXL356 | 微機電系統 C1 | |
| 平均電流(微安) | 573 | 77 | 172 |
圖16顯示了每分鐘5 s的活動數據測量電流消耗,其余時間器件處于待機模式。平均電流如表7所示。
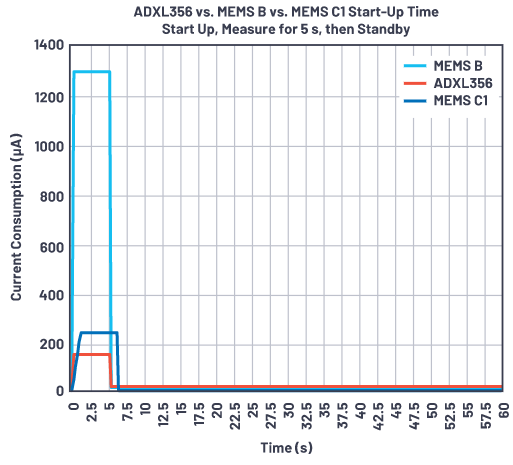
圖 16.ADXL356、MEMS B和MEMS C1在啟動時的電流消耗,然后在60 s以上最差情況下的啟動時間進行5 s測量。
| 微機電系統 B | ADXL356 | 微機電系統 C1 | |
| 平均電流(微安) | 128 | 32 | 23.4 |
即使在較低頻率的測量速率下(每60秒5秒),MEMS C1和ADXL356的平均電流消耗也非常接近,盡管工作和待機電流消耗存在差異。如果測量速率不那么頻繁,則在兩次測量之間關閉MEMS傳感器以降低電流消耗更為可行,如圖17所示,在這種情況下,ADXL356的平均電流消耗最低。
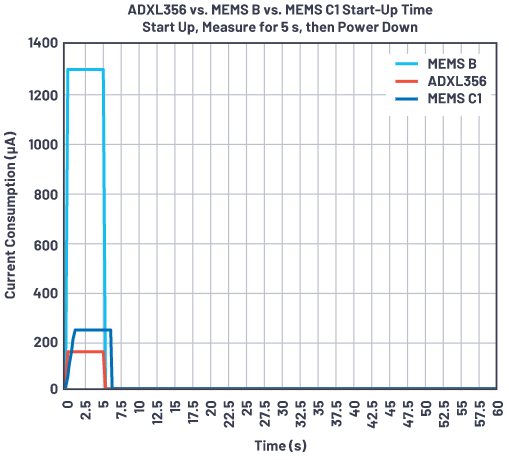
圖 17.ADXL356、MEMS B和MEMS C1在啟動時的電流消耗,然后測量5 s,然后關斷60 s。
| 微機電系統 B | ADXL356 | 微機電系統 C1 | |
| 平均電流(微安) | 113 | 13 | 23 |
智能網狀 IP 功耗
智能網格 IP 收發器(如 LTC5800)具有幾種不同的功耗曲線。圖18顯示了數據手冊中不同模式的最大功耗。但是,網絡中典型的SmartMesh芯片配置將消耗更少的電流以實現合理操作。許多因素將決定消耗多少功率,包括報告間隔(1 個數據包/分鐘與 1 個數據包/秒)、傳輸數據所需的跳數、有效負載大小(1 字節到 90 字節)和路徑穩定性(例如,80% 在室內密集網絡)。
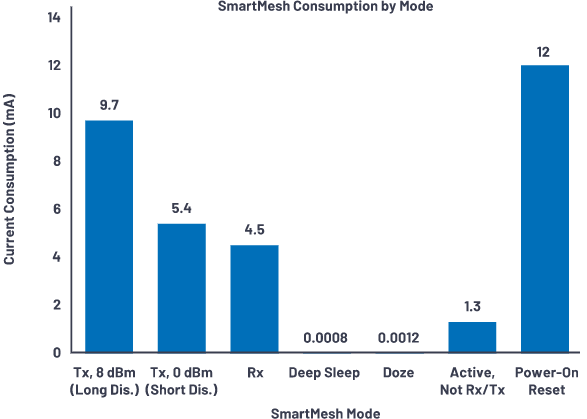
圖 18.智能網格 IP 電流消耗(最壞情況數據手冊規格)。
實際電池壽命取決于許多因素,例如微塵收集和傳輸數據的時間與微塵睡眠的時間。有效負載大小、路徑穩定性、傳輸間隔、跳躍深度和許多其他因素都會影響 SmartMesh IP 微塵將使用的功率量。SmartMesh 功耗和性能估算器是一種非常有用且準確的工具,可用于根據關鍵因素估算性能和功耗,如圖 19 所示。
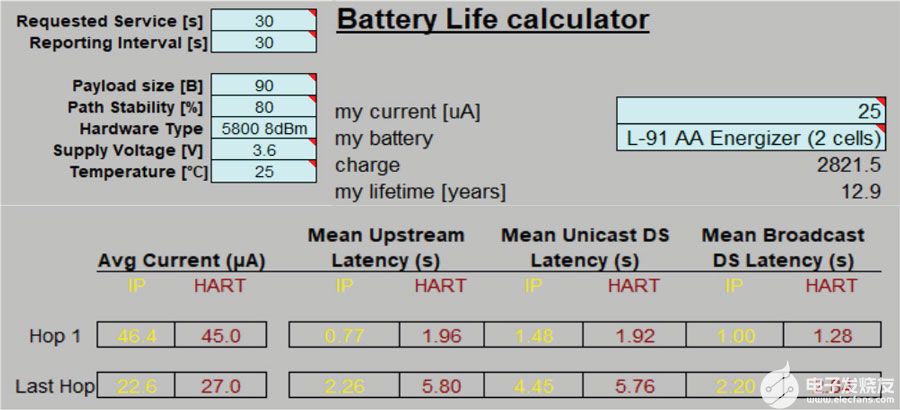
圖 19.智能網格功耗和性能估算器工具。
旅行者模塊:傳輸一個完整的數據集
要評估功耗,了解將一個完整的數據集從無線微塵傳輸到 SmartMesh IP 管理器需要多少數據包會很有用。在 1 秒的報告間隔下,60 包/分鐘將從微塵發送到經理。x、y 和 z 軸采樣數據分別由 16 位(2 字節)的 512 個時域采樣組成。FFT數據也被計算和傳輸,如圖20所示。
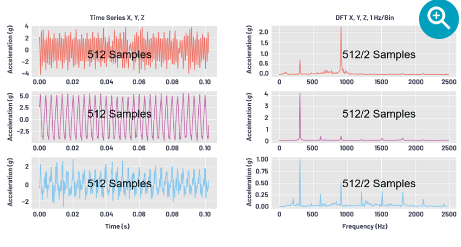
圖 20.顯示時域和頻域數據的 Voyager GUI。
(512 + 512/2) × 3 = 2304 個樣本,得到 2304 × 2 字節 = 4608 字節。90 字節在一個 SmartMesh 數據包中發送。4608 字節/90 字節 = 51.2 個數據包。需要 52 個 SmartMesh 數據包才能將一個完整的數據集從無線微塵傳輸到 SmartMesh IP 管理器。
為了提供功耗估算,我們使用 20 微塵網絡作為示例,其中微塵排列在 4 個躍點中,每個躍點有 5 個微塵。將數據有效負載大小設置為 90 字節,并將報告速率設置為 1 數據包/秒,Hop 1 微塵僅對 SmartMesh IC 的功耗為 587.9 μA(靜態條件)。對于最差情況下的動態條件,建議將功耗增加30%,得到587.9 μA×1.3 = 764.3 μA。這些結果通過智能網格功耗和性能估算器工具得到證實。
圖 21 顯示了 Voyager 模塊的最壞情況電池壽命估計值(2 × Saft LS14500),在兩種情況下有 4 個躍點,一種是微塵每 60 分鐘激活一次,另一種是每分鐘一次,持續 60 分鐘。正如預期的那樣,微塵每分鐘傳輸 60 分鐘的情況具有更短的電池壽命。躍點 1 處的微塵將有更多的工作要做,因為此微塵將接收從微塵 2、3 和 4 發送的所有數據。躍點 1 的電池壽命為 19.1 天(0.052 年),而躍點 4 的電池壽命為 20.1 天(0.054 年)。當微塵每小時傳輸 1 分鐘時,躍點 1 的電池壽命為 1.38 年,躍點 4 的電池壽命為 2.12 年。
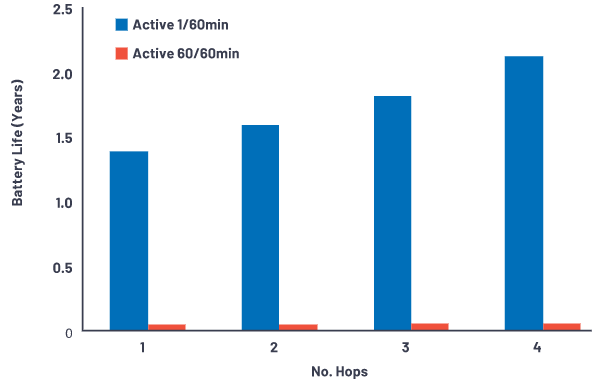
圖 21.SmartMesh 電池壽命與傳輸數據所需的躍點數。
結論
本文討論了推動目前CbM市場快速發展和增長的一些關鍵趨勢。低功耗、高性能MEMS傳感器和高保真、低功耗信號鏈組件對于為CbM行業提供快速部署資產所需的無線功能至關重要,并開始扭轉每年因計劃外停機而損失的500億美元。網狀網絡技術的概述提供了競爭無線技術之間主要差異的大致視圖,并強調了哪些技術最適合需要同步監測和控制以及類似有線可靠性的惡劣射頻環境。
選擇最合適的MEMS傳感器可能很困難,必須考慮許多因素,例如噪聲、帶寬和g范圍,但還必須考慮較少參考的數據手冊規格(如導通時間)以及無線系統所需的數據速率,因為這有助于確定哪種工作模式和數據速率最可行。
在工廠車間等惡劣的射頻工作環境中使用無線設備需要強大的通信和低功耗。本文展示了 SmartMesh 功耗和性能估算器工具中 SmartMesh 器件的最壞情況數據手冊和功耗估算值,以便對可能的情況進行高層次概述。建議使用此工具進行進一步調查,因為傳感器網絡可以根據您的特定需求進行定制,以更好地估計潛在的電池壽命和性能。在本系列文章的第 2 部分中,我們將展示 Voyager 平臺如何及早檢測各種機器故障,而第 3 部分將討論 Voyager 模塊的功耗和不同操作模式。
-
微控制器
+關注
關注
48文章
7908瀏覽量
153719 -
傳感器
+關注
關注
2564文章
52607瀏覽量
763845 -
射頻
+關注
關注
106文章
5729瀏覽量
169777 -
mems
+關注
關注
129文章
4071瀏覽量
192773 -
加速度計
+關注
關注
6文章
714瀏覽量
46608
發布評論請先 登錄
MEMS聲敏傳感器分類與應用
選擇溫度傳感器的考慮因素
盤點5種應用最廣MEMS傳感器
無線溫度傳感器:精準監控,無線傳輸的溫度管理解決方案
智能無線傳感器設計完全指南
參考曲線狀態評估指南







 工商網監
工商網監
評論