 開往春天的自動駕駛,從特斯拉和毫末智行的AI技術探索說起
開往春天的自動駕駛,從特斯拉和毫末智行的AI技術探索說起
2022行至年終,各種年度總結也紛至沓來。要說最近的大事件,一定少不了:自動駕駛又雙叒寒冬了。
大量“報憂不報喜”的新聞,說明2022年自動駕駛行業確實出現了一定程度的波動:激光雷達鼻祖德國ibeo和獨角獸Argo.ai相繼破產;不少自動駕駛公司傳出裁員和組織架構調整,Waymo的估值大幅下跌,起火撞車等負面輿論不斷……這些事件都引發了悲觀情緒,讓“寒冬說”顯得有理有據。
但如果我們去仔細探究就會發現:第一,人工智能永遠是在泡沫和寒冬中振蕩,自動駕駛寒冬的論調其實早在幾年前就出現了,但主機廠、科技企業、資本市場對自動駕駛的投入并沒有冰封,參與者眾多;第二,調整和波動也不一定就意味著悲觀,寒冬期往往也是優勝劣汰,比如此次調整后很多廠商都將目光轉向了L2級別的輔助駕駛技術,大浪淘沙始見金,這正是具有領先技術優勢的AI公司展露生命力的時機。
更進一步,中美公司作為自動駕駛領域中AI技術的頭部選手,其所面臨的背景和挑戰實際上也有差異,中國自動駕駛企業接下來走向何處,恐怕不能簡單地依靠海外獨角獸的境遇來判斷。
所以,我們需要拋開情緒,回歸事實,去對比一下,中美在自動駕駛技術模式上究竟有哪些異與同,開往春天的自動駕駛又需要穿越哪些障礙?
目前,以國外的特斯拉、國內的毫末智行等為代表的漸進式自動駕駛公司,都已經實現了乘用車輔助駕駛產品規模量產和商業化落地。前不久,毫末智行和特斯拉也相繼舉辦了第六屆HAOMO AI DAY、2022Tesla AI Day,公布了各自的最新產品和技術成果。
近日,毫末在其三周年內部信中新發布了其愿景“讓機器智能移動,給生活更多美好”,這其實也透露出一個信號,那就是自動駕駛AI技術其實可以廣泛復用在各種場景的機器人上。因此,自動駕駛的前景不言自明,所以,最終的關鍵就在于自動駕駛技術是否能抵達規模落地的終局?
深入對比兩家在自動駕駛AI技術的探索,我們可以發現,兩家正在積極擁抱以大數據、大算力、大模型為標志的自動駕駛3.0時代,同時在技術及產品等多個方面,也展現出中美自動駕駛發展模式的一些異同。
我們用一張圖進行簡單對比:
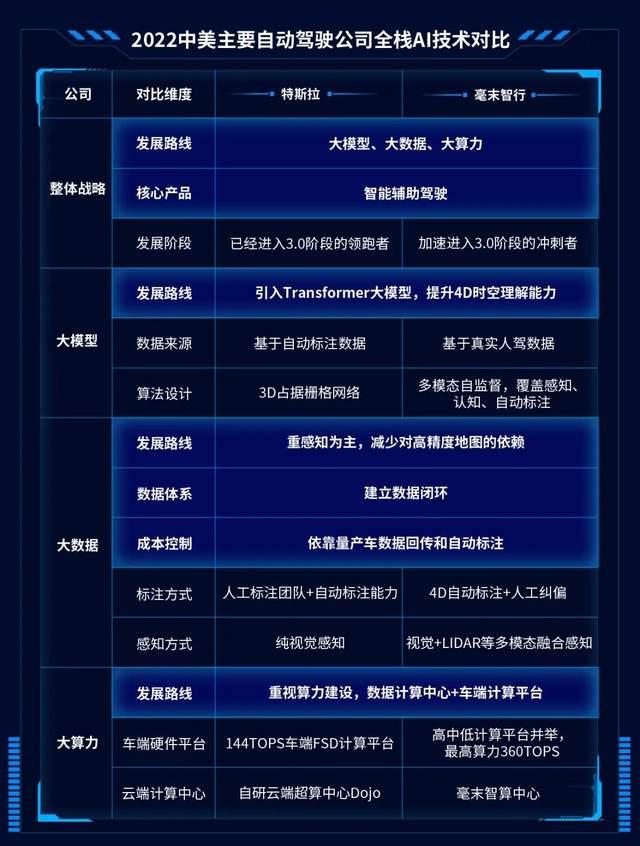
可以看到,自動駕駛行業正在迎來一個深刻的產業之變,如何穿越寒冬、鞏固王城,我們可以從這兩家企業的技術探索的步履中找到線索。
高階自動駕駛“降維”與智能輔助駕駛“升級”同時進行
無論媒體、企業還是大眾,可能都被這一場突如其來的自動駕駛“寒冬”風波驚嚇得不輕。但平靜下來,會發現這場風波其實早有征兆。
一方面,L4及以上的自動駕駛技術非常困難,道路漫長,技術前景模糊,2019年初,時任Waymo首席執行官約翰·克拉夫奇克就曾公開表示“自動駕駛汽車可能永遠無法在全路況條件下行駛”,算是預言了這場高階自動駕駛技術的“寒冬”。
另一方面,商業化落地遙遙無期,讓投入巨大的自動駕駛公司很難在短期內實現盈利,去年頭豹研究院發布的一份研報就認為,Robotaxi模式是處在“偽概念”階段,相關公司仍深陷“量產地獄”。
客觀來說,對于高階自動駕駛的質疑早已非一日之寒,而大量高階自動駕駛的企業也開始主動“降維”,發力輔助駕駛。傳統主機廠如福特和大眾停止Argo AI的投入之后,轉而集中資源做L2+高級駕駛輔助系統和L3自動駕駛系統的開發。一批優秀的L2級別自動駕駛相關企業開始蠶食傳統博世、大陸、奧托立夫等公司的份額。而博世也投資了文遠知行以展開乘用車的L2-L3級自動駕駛軟件開發。
近年來,智能輔助駕駛與特定場景下的高階自動駕駛商用車,展現出較強的商業化前景。特斯拉、毫末智行等都已實現了規模化量產,市場正在加速打開。
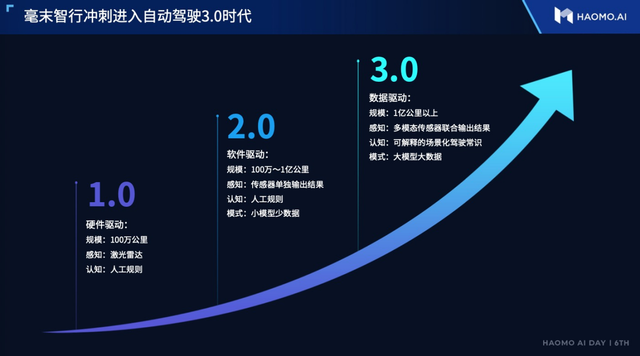
隨著更多競爭者的加入,以及AI技術的發展,自動駕駛正在進入以大數據、大算力、大模型為標志的新時代,智能輔助駕駛也開始沿著以數據驅動的大數據、大模型技術路線進行升級。其中,特斯拉已經是特斯拉是進入自動駕駛3.0階段的領跑者,中國自動駕駛企業如毫末智行也在加速沖刺。
高階自動駕駛“降維”與智能輔助駕駛“升級”同時發生,是產業轉折期出現的新變化。總的來說,以漸進式路線作為核心戰略的頭部自動駕駛企業,破解了困擾自動駕駛的商業化難題,是比較值得關注的。
與此同時,中美自動駕駛的技術趨勢、基礎設施、政策引導、產業鏈情況也各有不同,所以盡管美國的特斯拉和中國的毫末智行,同為漸進式自動駕駛企業,但在進入3.0階段,對于大數據、大算力、大模型的戰略部署與落地應用,也出現了一定的差異。
以特斯拉和毫末智行為例,在核心戰略與技術路線上是高度對齊的,都專注于漸進式技術路線,打造智能輔助駕駛產品,比如特斯拉的Autopilot、毫末智行的HPilot智能輔助駕駛產品,并積極推動自動駕駛3.0階段的到來,在大數據、大模型、大算力這三大技術能力上做了大量工作。
簡單形容雙方的異同,就是前往同一目的地,但彼此會乘坐不同交通工具。接下來我們就分析一下二者的異同,可能對接下來自動駕駛行業的發展帶來不少啟發。
目的地一:增強感知能力,大模型“出奇跡”
自動駕駛技術架構與解決方案,需要同時包含感知、決策、執行這三部分。其中,傳統的自動駕駛感知系統是由各類傳感器組成的,包括激光雷達、毫米波雷達及各類攝像頭。
特斯拉采用了純視覺感知路線,即去掉毫米波雷達等感知器,完全依靠車載AI攝像頭收集數據,作為自動駕駛算法的決策依據。這種模式的好處是,減少了激光雷達的使用,大大降低了自動駕駛汽車的整體造價,視覺方案對行人、交通標志標線等細節有很強的感知能力,成本優勢明顯,有助于商業化進展。但少了傳感器的輔助,會影響到自動駕駛系統的可靠性。
中國城市場景更加復雜,毫末智行則采用視覺+雷達等多模態融合感知,其中視覺攝像頭負責細節感知,而雷達傳感器提供對環境距離、速度等的精準感知,這種方案為自動駕駛提供冗余感知,在可靠性、安全性上更勝一籌,更容易滿足城市管理者及居民對自動駕駛的要求,減少事故發生率,對產業良性發展帶來助益。
為此,毫末從第一性原理出發思考自動駕駛感知的最優落地方案,選擇了“重感知”這一路線,在城市導航輔助駕駛場景,實現只依賴和人類駕駛員一樣的普通導航地圖而不依賴業界常用的高精地圖,從而避免了高精地圖覆蓋范圍、鮮度更新以及維護成本等挑戰。
選擇“重感知”路線的背后,其實是毫末更注重大模型算法的投入,即通過數據智能體系MANA建立強感知的時空理解能力,通過使用時序的transformer模型在 BEV 環視空間上構建實時局部空間,通過這種方式讓車道線的感知輸出更加穩定和準確。通過強大的實時感知能力,整個過程只需要普通導航地圖里面的相對可靠的拓撲信息即可,最終讓車輛像我們人類自己開車一樣進行環境感知。
感知系統的發展進化,也使得數據規模不斷提升,將高維數據抽象成感知能力,這就需要高效的AI模型,進行分析預測和控制,這也是自動駕駛系統的核心技術。

總體來說,特斯拉和毫末智行都積極布局大模型的落地應用,將Transformer引入自動駕駛系統中,來提升AI模型效果,實現自動駕駛系統感知智能和認知智能的大幅優化,從而減少對高精度地圖的依賴。

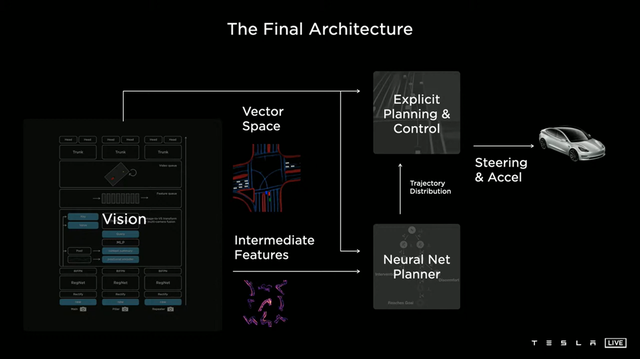
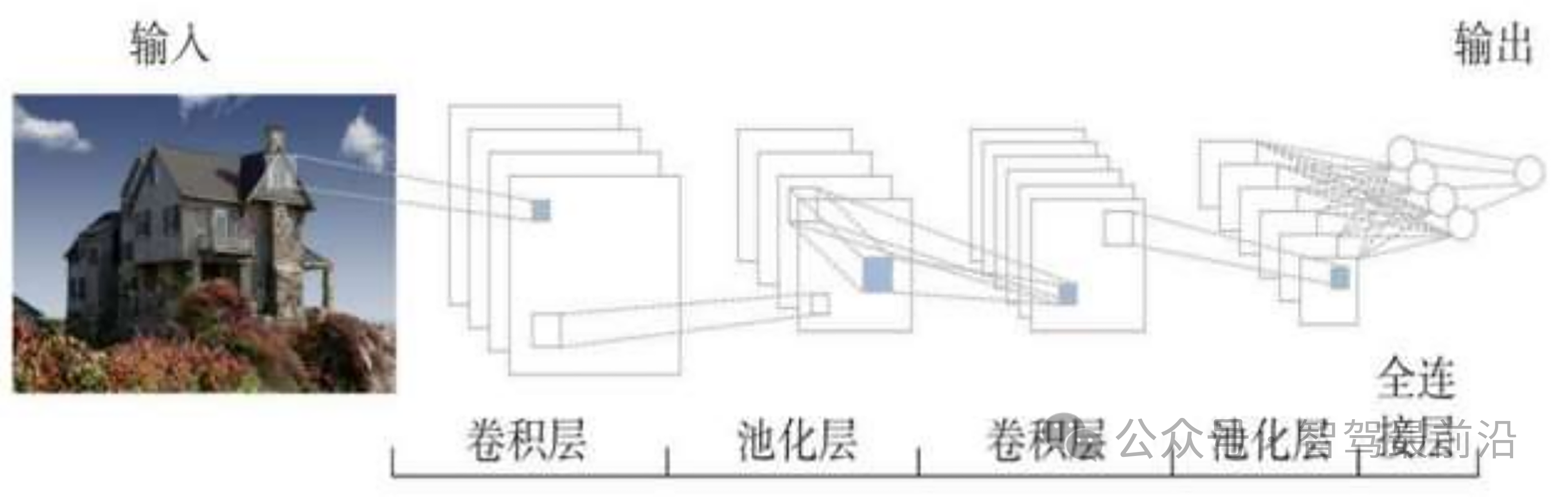
特斯拉使用Transformer與CNN、3D模型等相結合,組成綜合的神經網絡系統,對汽車AI攝像頭所采集的圖像數進行跨時間的圖像融合,來實現基于語言模型的車道線感知、基于向量空間的路徑規劃等功能。
毫末智行從2021年7月開始,就啟動了對Transformer的研究和落地嘗試,也是中國第一家應用Transformer的自動駕駛公司。借助Transformer實時建模能力,對多模態融合感知數據進行數據前融合,搭建具有時序特征的立體場景,讓自動駕駛系統具有強大實時感知能力,在城市環境中不依賴高精地圖,也能應對道路模糊、復雜路口、環島等道路感知挑戰。比如毫末智行自研的BEV Transformer,就在城市道路上實現了多傳感器融合車道線識別。

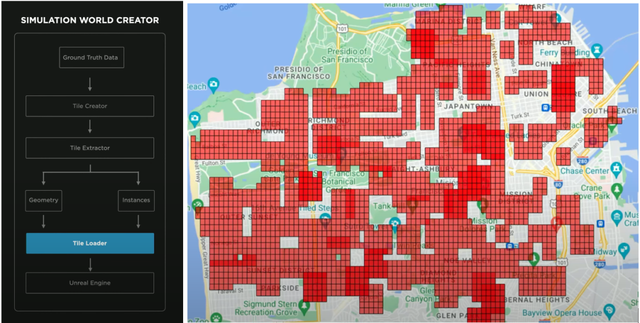
此外,AI系統還需要在仿真環境中進行驗證、訓練和迭代,場景構建會直接影響到模型訓練。特斯拉是基于虛幻4引擎渲染的仿真環境,來測試自動駕駛系統在極端情況、復雜環境中的效果。毫末智行則選擇與阿里及德清政府合作,將真實交通流導入到仿真引擎中,用于路口場景的調試驗證。二者的區別在于,特斯拉的虛擬仿真環境只用于復雜情況測試,訓練效率高;毫末智行的真實仿真環境,對自動駕駛系統的現實表現提升幫助很大,但場景重復度比較高。

目前來看,Transformer為代表的大模型,憑借對大數據優勢的釋放、強大的序列建模能力、全局信息感知能力,以及為算法開發提質增效等優勢,正在成為自動駕駛企業的主流選擇,而特斯拉、毫末智行也因為先行先試,取得了領先優勢。
目的地二:降本增效,讓大數據“縱享絲滑”
大模型需要海量數據的“喂養”,自動駕駛感知系統的升級使得數據規模激增。數據量一方面是自動駕駛企業的核心競爭力之一,另一方面也帶來了標注、處理、分析、存儲等壓力和成本。因此,在自動駕駛3.0階段,大數據的降本增效將成為自動駕駛企業的關鍵賽點。
正如毫末智行CEO顧維灝所說:“樣本標注的時間成本和金錢成本還是很高,我們需要有一種能夠直接使用大量無標注數據的方法,這樣才能更高效地發揮出毫末在數據規模方面的優勢”。
特斯拉和毫末智行都很重視大數據的降本增效,不過,由于歷史積累不同,雙方的大數據解決方案也各有側重。

特斯拉發展較早,數據規模遠遠領先其他自動駕駛廠商,依靠數據引擎Data Engine,實現了數據驗證、標注、訓練、部署的閉環,充分發揮大數據的價值。不過,早期無監督學習尚不成熟,特斯拉也依賴人工標注與自動化標注同時進行,自建了超千人的數據標注團隊,也難免會遇到人工標注效率低的問題。目前,特斯拉也在積極提高數據自動標注的質量和效率,引入無監督學習,來對海量道路信息進行標注。
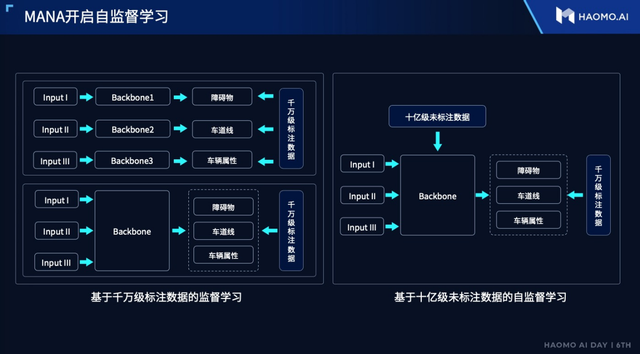
毫末智行創業初期,就很重視數據價值和數據效率,選擇使用無數據標注的自監督學習,高效發揮出毫末在數據規模方面的優勢。構造了一個增量式的學習訓練平臺MANA,通過標注過程的自動化,提高數據利用的效率。截至目前,數據智能體系MANA的學習時長已經超過40萬小時。

大數據的降本增效,直接影響到自動駕駛企業的商業化潛力。特斯拉和毫末智行依據各自的發展狀況、先天基礎、技術路線、產業環境,已經找到了各自的解法。
目的地三:持續投入,讓大算力“供給自由”
基于大數據、大模型的自動駕駛系統,需要澎湃算力的支撐,算力因此成為決定自動駕駛系統天花板的關鍵要素。如何為自動駕駛汽車和系統提供源源不斷的大算力,也是特斯拉、毫末智行等頭部企業所重點布局的領域。
目前來看,特斯拉和毫末智行都采取了自研硬件+超算中心的解決方案。
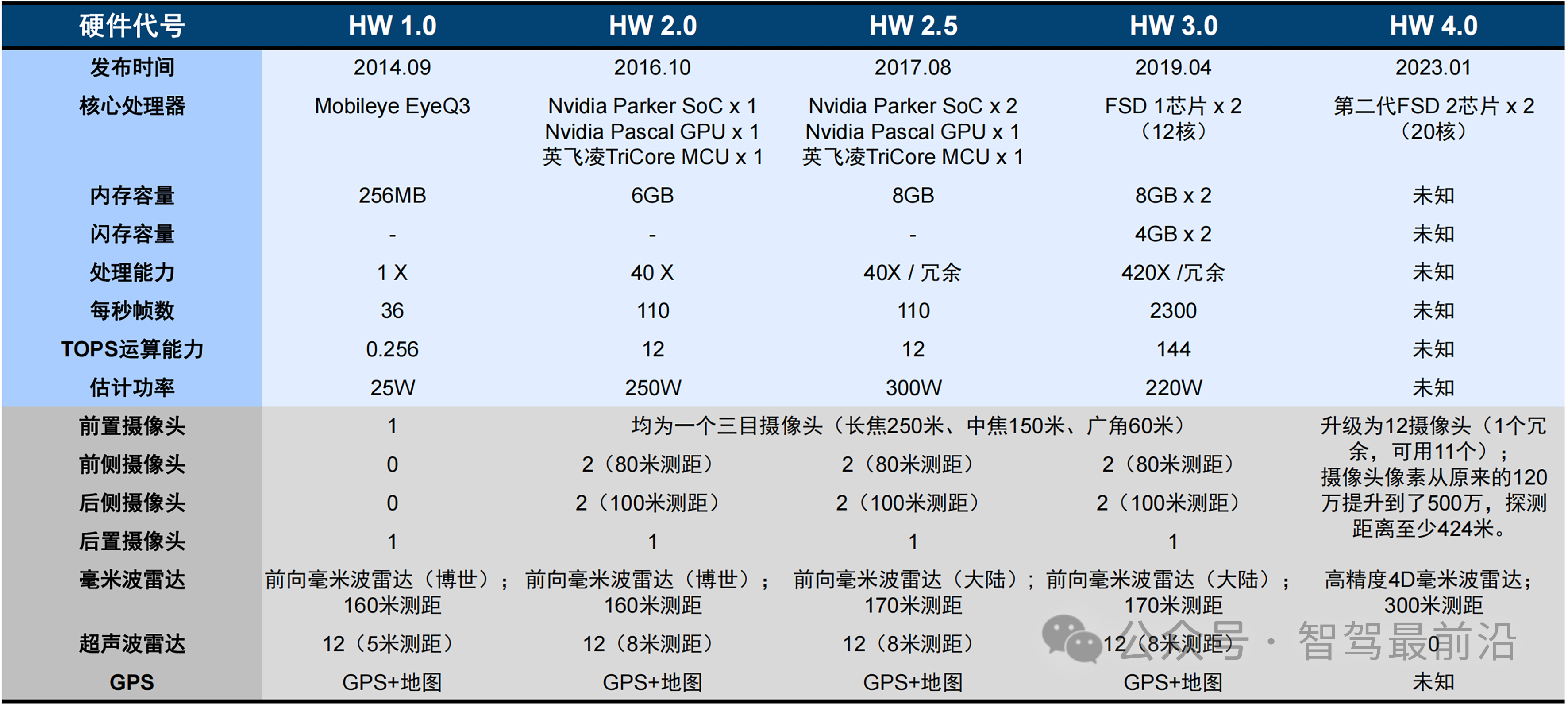
硬件方面,端側計算平臺來滿足自動駕駛系統對計算實時性、低延遲性的高要求,來保障實時分析決策和操作指令的及時執行。特斯拉FSD 1.0能夠提供144 TOPS算力,能夠滿足L2/L3級別自動駕駛的需求;毫末智行推出的硬件計算平臺小魔盒3.0,算力則達到了360 TOPS,為后續的軟硬件升級留下了更多空間。

通過云端算力處理大量回傳數據,訓練迭代算法模型,更具成本優勢和性能優勢,特斯拉和毫末智行也都開始建設智算中心,為自動駕駛大模型訓練、大數據分析處理提供算力支撐。智算中心需要一定的建設周期,且投入較大,特斯拉由于布局更早,已經研發出了專門用于自動駕駛訓練的云端AI芯片D1以及計算中心Dojo,其云端超算中心Dojo計劃在2023年投入使用。

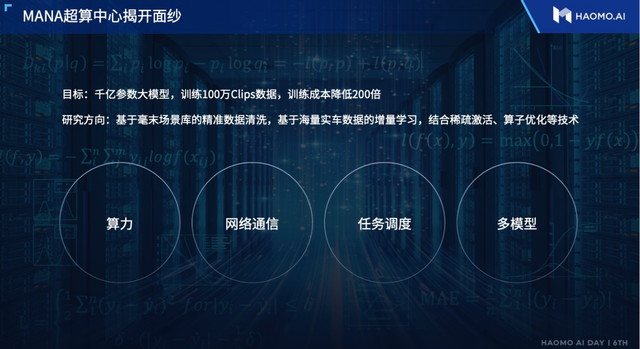
毫末智行則是正在緊鑼密鼓地推出中國自動駕駛公司的首個智算中心——毫末智算中心,率先開啟了行業基礎設施的探索和布局。毫末智算中心的核心目標是滿足千億參數大模型的訓練需求,處理數據規模100萬clips,整體訓練成本降低200倍。大算力資源的持續投入,將使得數據訓練和模型迭代實現“算力自由”。
可以看到,大算力是一個時間工程,不是一朝一夕能夠建立起競爭壁壘的,需要引起自動駕駛企業的高度重視,特斯拉、毫末智行這樣先知先覺的發力者,則更有可能在接下來的自動駕駛市場競爭中占據優勢身位。
撥云見月:自動駕駛商業化的半程風景
經過大模型、大數據、大算力的一路闖關,特斯拉和毫末智行最終殊途同歸,都實現了成本更優基礎上的規模化量產,展現出自動駕駛3.0階段的商業化能力。
具體來說,特斯拉有著堪稱“生產狂魔”的量產能力,依托高度自動化、模塊化的超級工廠,使其電動汽車的市場占有率一騎絕塵。毫末智行也依托智能駕駛產品的規模化量產,以及智能駕駛產品流程化、異步并行開發的工程能力,實現了產品穩健迭代與交付,拿下中國量產自動駕駛第一名。
從這個角度看,盡管中美自動駕駛的AI技術路線在細節上有所不同,但根本目標都是一致的,那就是推動自動駕駛技術成長,讓自動駕駛產業成為數字經濟的核心支柱產業之一。而這個終極目標最需要的努力也是有共性的:
1.技術能力的強勢崛起。毫末智行能夠加速沖刺3.0時代,靠的是底層技術的厚積薄發,中國首個自動駕駛數據智能體系MANA,中國最大規模的認知智能場景庫,讓可行、可靠、可商用的自動駕駛成為現實,也讓同賽道選手很難超越。
2.商業市場的廣泛認可。領先的技術能力和產品基礎,為毫末智行和特斯拉帶來了市場的信任,又得以在場景中促進數據能力的迭代,從而能生產出更好的產品,形成良性循環,構筑了市場領先性。
3.無人區的自主探索。如果說,技術與市場都有發展參照物,那么自動駕駛作為一個與城市空間、社會經濟生活深度結合的技術,也需要中國企業擔負起一些新問題的探索,比如安全性的保障、參與自動駕駛法律法規行業標準、電動汽車的產業鏈共榮、低碳綠色的社會責任、東數西算工程的發展等,將自動駕駛技術的商業價值與社會價值進一步釋放,毫末智行為代表的中國廠商正在路上。
在所謂的“寒冬”里,特斯拉和毫末為代表的自動駕駛企業反而踏上了開往春天的高速路。
2022年有一個特別打動我的場景,是毫末智行的董事長、CEO等高層都是親自下場,跟技術團隊一起,走在城市的一條條街道上路測,從白天走到黑夜,從白皮膚曬成了黑臉龐……這個畫面說明,中國自動駕駛產業的路,只能由中國企業一步一個腳印地從土地里踩出來。
正是無數這樣的步履,讓我們相信,中國AI、中國企業,一定會在自動駕駛的舞臺上不斷抵達未來。
審核編輯黃昊宇
-
特斯拉
+關注
關注
66文章
6371瀏覽量
128646 -
AI
+關注
關注
88文章
34396瀏覽量
275639 -
自動駕駛
+關注
關注
788文章
14223瀏覽量
169670
發布評論請先 登錄
新能源車軟件單元測試深度解析:自動駕駛系統視角
自動駕駛經歷了哪些技術拐點?

NVIDIA Halos自動駕駛汽車安全系統發布
小馬智行開通廣州自動駕駛示范運營專線
小馬智行獲準開展自動駕駛卡車編隊無人化測試
NVIDIA DRIVE技術推動自動駕駛發展
從特斯拉看智能駕駛未來發展
索尼本田移動公司合作開發AI自動駕駛電動車
自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術
中國電動車企競相角逐自動駕駛領域,向特斯拉發起技術挑戰
特斯拉智能駕駛|從視覺優先的技術路徑到未來的挑戰?





 工商網監
工商網監
評論