 伺服系統組成、概述與控制原理(三環控制)
伺服系統組成、概述與控制原理(三環控制)

伺服系統既可以是開環控制方式,也可以是閉環控制方式。本文按后者敘述。
一、伺服系統簡述
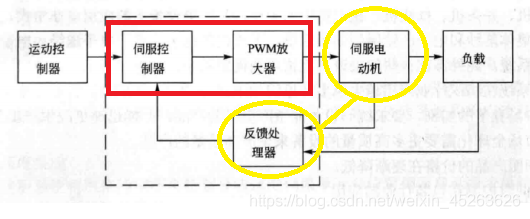
伺服系統(servomechanism)指經由閉環控制方式達到對一個機械系統的位置、速度和加速度的控制。 一個伺服系統的構成包括被控對象、執行器和控制器(負載、伺服電動機和功率放大器、控制器和反饋裝置)。
執行器的功能在于提供被控對象的動力,其構成主要包括伺服電動機和功率放大器,伺服電動機包括反饋裝置如光電編碼器、旋轉編碼器或光柵等(位置傳感器)。
控制器的功能在于提供整個伺服系統的閉環控制如轉矩控制、速度控制、位置控制等,伺服驅動器通常包括控制器和功率放大器。
反饋裝置除了位置傳感器,可能還需要電壓、電流和速度傳感器。
下圖為一般工業用伺服系統的組成框圖,其中紅色為伺服驅動器組成部分,黃色為伺服電機組成部分。
“伺服”——詞源于希臘語“奴隸”的意思。人們想把“伺服機構”當成一個得心應手的馴服工具,服從控制信號的要求而動作:在訊號來到之前,轉子靜止不動;訊號來到之后,轉子立即轉動;當訊號消失,轉子能即時自行停轉。由于它的“伺服”性能,因此而得名——伺服系統。
二、常用參數
1、伺服電機銘牌參數
法蘭尺寸
電機極對數
電機額定輸出功率
電源電壓規格:單相/三相
電機慣量:分為大、中、小慣量,指的是轉子本身的慣量,從響應角度來講,電機的轉子慣量應小為好;從負載角度來看,電機的轉自慣量越大越好
電機出軸類型:鍵槽、扁平軸、光軸、減速機適配…
電機動力線定義:U: RED V:BLACK W: WHITE
額定轉速
編碼器線數:2500/1250/1000/17B/20B
法蘭是軸與軸之間相互連接的零件,用于管端之間的連接。
2、伺服驅動器銘牌參數
額定輸出功率
電源電壓規格
編碼器線數
3、伺服系統的性能指標
檢測誤差:包括給定位置傳感器和反饋位置傳感器的誤差,傳感器本身固有,無法克服;
系統誤差:系統類型決定了系統誤差。
只要p+q>0,對階躍輸入信號就有足夠的跟蹤能力;對于速度輸入信號,I型系統跟蹤能力大幅削弱,跟隨誤差與開環傳遞函數的比例系數成反比,II型仍具有優良跟蹤能力;對于加速度輸入信號,僅II型系統能勉強跟隨。
三、伺服電機相關
1、伺服電機的選型
系統精度:需綜合考慮轉子轉動慣量、電動機類型、轉矩抖動等
電動機功率:負載方式及大小計算輸出力矩
電動轉速
選配剎車:剎車用來在電機停止時候鎖定位置,不讓電機由于外力作用發生運動;并非在運行時剎車。
過載能力
2、伺服電機的反饋裝置/電機轉一圈所需脈沖數
伺服系統常用的檢測元件以光電編碼器最為常見。 編碼器(encoder)是將信號(如比特流)或數據進行編制、轉換為可用以通訊、傳輸和存儲的信號形式的設備。
根據檢測原理,編碼器可分為光學式、磁式、感應式和電容式。根據其刻度方法及信號輸出形式,可分為增量式、絕對式以及混合式三種。
增量式:每轉過單位的角度就發出一個脈沖信號
絕對式:就是對應一圈,每個基準的角度發出一個唯一與該角度對應二進制的數值,通過外部記圈器件可以進行多個位置的記錄和測量
編碼器和電流環沒有任何聯系,它的采樣來自于電機的轉動。
編碼器線數:即編碼器分辨率,也即一轉所發出的脈沖數,例如2500線表示轉一圈需要發送2500個脈沖,這說明伺服電機轉一圈所需脈沖數是固定的,且與電機自帶編碼器參數相關。
可以發現線數有兩種,一種類似2500線、1600線等,一種為17位(17B)、20位(20B)等。前者為增量式編碼器線數,后者為絕對式編碼器線數,17B表示一轉所需的脈沖數為2^17即131 072個脈沖。
四、伺服驅動器控制原理
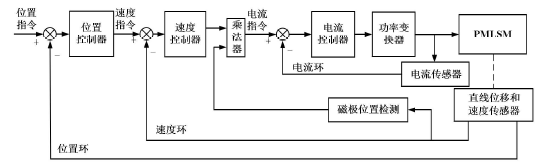
運動伺服一般都是三環控制系統,從內到外依次是電流環、速度環和位置環。
伺服的控制方式有3種,分別是位置控制、速度控制和轉矩控制。1、轉矩控制(電流環/單環 控制):轉矩控制方式是通過外部模擬量的輸入或直接的地址的賦值來設定電機軸對外的輸出轉矩的大小。可以通過即時的改變模擬量的設定來改變設定的力矩大小,也可通過通訊方式改變對應的地址的數值來實現。主要應用于需要嚴格控制轉矩的場合,在轉矩模式下驅動器的運算最小,動態響應最快。
單環控制難以滿足伺服系統的動態要求,一般不采用。2、速度控制(速度環、電流環/雙環 控制):通過模擬量的輸入或脈沖的頻率都可以進行轉動速度的控制。速度控制包含了速度環和電流環。任何模式都必須使用電流環,電流環是控制的跟本。
3、位置控制(三環控制):伺服中最常用的控制。位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉動速度的大小,通過脈沖的個數來確定轉動的角度(類似步進電機),也有些伺服可以通過通訊方式直接對速度和位移進行賦值(外部模擬量的輸入)。由于位置模式可以對速度和位置都有很嚴格的控制,所以一般應用于定位裝置。
位置控制模式下系統進行了所有 3 個環的運算,此時的系統運算量最大,動態響應速度也最慢。
轉矩控制:是指伺服驅動器僅對電機的轉矩進行控制
速度控制:是指驅動器僅對電機的轉速和轉矩進行控制
位置控制:是指驅動器對電機的轉速、轉角和轉矩進行控制
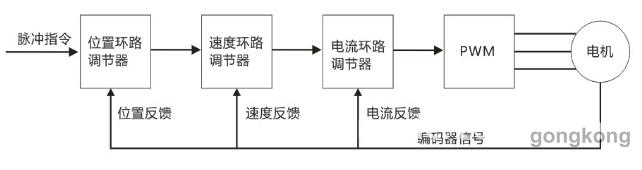
APR——位置調節器;ASR——速度調節器;ACR——電流調節器 4、三環就是3個閉環負反饋PID調節系統。第一環為電流環,最內環。此環完全在伺服驅動器內部進行,其PID常數已被設定,無需更改。電流環的輸入是速度環PID調節后的輸出,電流環的輸出就是電機的每相的相電流。**電流環的功能為對輸入值和電流環反饋值的差值進行PD/PID調節。**電流環的反饋來自于驅動器內部每相的霍爾元件。電流閉環控制可以抑制起、制動電流,加速電流的響應過程。第二環為速度環,中環。速度環的輸入就是位置環PID調節后的輸出以及位置設定的前饋值。**電流環的功能為對輸入值和速度環反饋值的差值進行PI調節。**速度環的反饋來自于編碼器的反饋后的值經過“速度運算器”的計算后得到的。第三環為位置環,最外環。位置環的輸入就是外部的脈沖。**位置環的功能為對輸入值和位置環反饋值的差值進行P調節。**位置環的反饋來自于編碼器反饋的脈沖信號經過“偏差計數器”的計算后得到的。位置調節器APR其輸出限幅值是電流的最大值,決定著電動機的最高轉速。 位置環、速度環的參數調節沒有什么固定的數值,由很多因素決定。
多環控制系統調節器的設計方法是從內環到外環,逐個設計各環調節器,使每個控制環都是穩定的,從而保證整個控制系統的穩定性;每個環節都有自己的控制對象,分工明確,易于調整。這種設計的缺點在于對最外環控制作用的響應不會很快
5、伺服系統的增益參數
按照設備需求選擇,選擇好合適的控制模式后,需要對伺服增益參數進行合理的調整。使得伺服驅動器能快速、準確的驅動電機,最大限度發揮機械性能。伺服增益通過多個參數進行調整,它們之間會相互影響。
位置比例增益:設置值越大,增益越高,剛度越大,相同頻率指令脈沖條件下,位置滯后量越小。但數值太大可能會引起振蕩或超調;
位置前饋增益:位置環的前饋增益大,控制系統的高速響應特性提高,但會使系統的位置不穩定,容易產生振蕩;
速度比例增益:設置值越大,增益越高,剛度越大,相同頻率指令脈沖條件下,速度滯后量越小。但數值太大可能會引起振蕩或超調;
速度積分時間常數:設置值越小,積分速度越快。
速度反饋濾波因子:數值越大,截止頻率越低,電機產生的噪音越小;數值越小,截止頻率越高,速度反饋響應越快。
最大輸出轉矩設置
五、伺服系統的設計
根據伺服電動機的種類,伺服系統可分為直流和交流兩大類。采用電流閉環控制后,二者具有相同的控制對象數學模型。因此可用相同的方法設計交流或直流伺服系統。 對于閉環伺服控制系統,常用串聯校正或并聯校正方式進行動態性能的調節。校正裝置串聯配置在前向通道的校正方式稱為串聯校正,一般把串聯校正單元稱作調節器,所以又稱調節器校正;若校正裝置與前向通道并行,稱為并聯校正。
調節器校正:常用的調節器有PD調節器、PI調節器和PID調節器。設計中根據實際伺服系統的特征進行選擇。
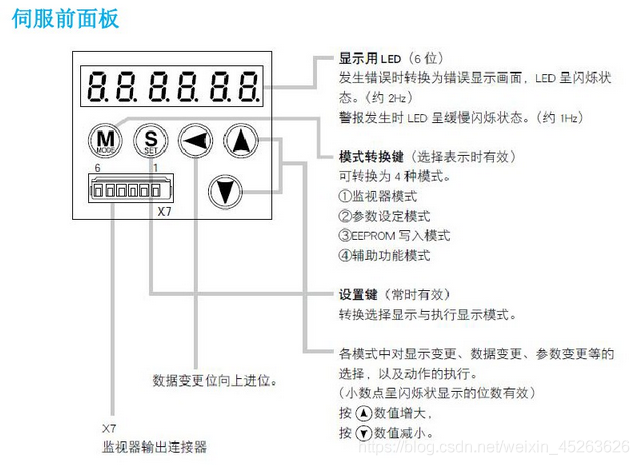
六、系統接線及面板設置
此處僅作概述。
系統接線
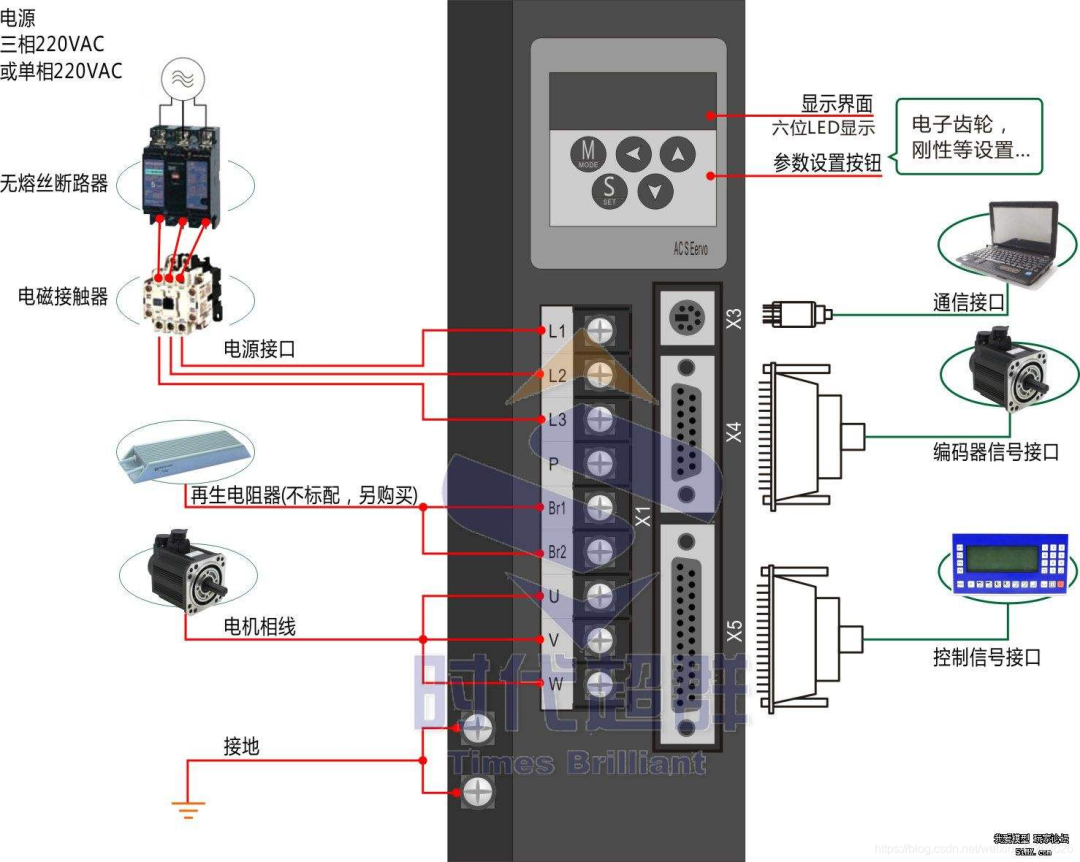
面板設置
七、伺服電動機與其它電動機的辨析
1、伺服電動機與普通電動機的區別
普通電動機(有刷)多運行于開環控制,伺服電動機運行于閉環控制。
伺服電動機動態性高
伺服電動機啟動轉矩大、調速范圍寬
伺服電動機結構緊湊
伺服電動機定子散熱方便
2、伺服電動機與舵機的區別
舵機相當于簡化版的完整的伺服系統。
伺服電機都是三環控制,即電流環、速度環、位置環;舵機只檢測位置環(一般用電位器)。
3、伺服電動機與步進電動機的區別
步進電機多運行于開環控制,伺服電動機運行于閉環控制。(使用步進電機的場合,要么不需要位置反饋,要么在其他設備上進行位置反饋)
伺服電機控制精度和定位高于步進電機
伺服電機低頻特性好,過載能力大,響應時間短
伺服電機調速范圍大于步進電動機
步進電機只能接受脈沖信號,二私服電動機可以接受模擬信號、脈沖信號和總線通信信號
伺服電機和步進電機常被搞混,二者外形相似,區別點在于伺服電機尾部的反饋裝置;此外步進電機一般都是一個引出線端,伺服電機由于帶編碼器所以有2個引線輸出端(編碼線和動力線)。
審核編輯 :李倩
-
編碼器
+關注
關注
45文章
3786瀏覽量
137610 -
伺服系統
+關注
關注
14文章
585瀏覽量
40063 -
位置傳感器
+關注
關注
3文章
281瀏覽量
28067
原文標題:伺服系統組成、概述與控制原理(三環控制)
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
伺服系統和PLC各自在什么場合使用
三環電容的高可靠性,在汽車電子中的應用!
三菱PLC伺服控制系統介紹
伺服系統在CNC機床中的應用
伺服系統穩定性提升技術 伺服系統編碼器的工作原理
伺服系統在機器人中的作用 伺服系統與傳統電機對比
伺服系統與步進電機的區別 如何選擇合適的伺服系統
伺服系統工作原理解析 伺服系統在自動化中的應用
伺服系統基本概念和與變頻的關系
伺服控制系統的分類方式和常見伺服控制系統介紹






 工商網監
工商網監
評論