 用于距離測量和物體檢測的飛行時間系統
用于距離測量和物體檢測的飛行時間系統

距離測量和物體檢測在許多領域都發揮著重要作用,無論是在工廠自動化、機器人應用還是物流中。
特別是在安全方面,需要對特定距離的物體或人員進行檢測和響應。例如,一旦工人進入其危險區域,機器人手臂可能需要立即停止。
飛行時間(ToF)為此變得越來越重要。使用ToF技術,光從調制源(例如激光)發射,然后由傳感器或相機捕獲從一個或多個物體反射的光束。因此,可以通過發射光和接收反射光之間的時間延遲?來確定距離。時間延遲與相機與物體之間距離的兩倍(往返)成正比。因此,距離可以估計為深度 d = (c × Δt)/2,其中 c 是光速。因此,ToF相機輸出2D數據以及所需的深度信息。
ToF允許一次記錄整個圖像。無需逐行掃描或傳感器與被觀察物體之間的相對運動。ToF通常被歸類為LIDAR(光檢測和測距),但它是基于閃存LIDAR的方法,而不是掃描LIDAR。
使用ToF測量光脈沖的飛行時間基本上有兩種不同的方法:基于電荷耦合器件(CCD)技術的脈沖操作和連續波(CW)操作。
光脈沖發射和接收之間的經過時間是在脈沖模式下測量的,而發射和接收調制光脈沖之間的相移是在CW模式下確定的。兩種操作模式都有優點和缺點。脈沖模式對環境光更魯棒,因此更適合戶外應用,因為該技術通常依賴于在短積分窗口內以非常短的脈沖發射的高能光脈沖。而CW模式可能更容易實現,因為光源不必非常短,具有快速上升/下降沿。但是,如果精度要求變得更加嚴格,則需要更高頻率的調制信號,并且可能難以實現。
現有的像素尺寸可實現高芯片分辨率,不僅可以進行距離測量,還可以實現物體和手勢識別。要測量的距離范圍從幾厘米(《10厘米)到幾米(《15米)。
不幸的是,并非所有物體都能被檢測到相同的程度。物體的條件、反射率和速度會影響測量結果。
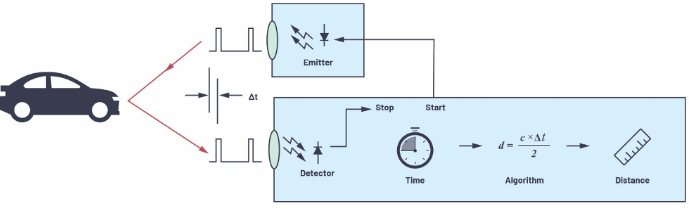
圖1.飛行時間測量原理。
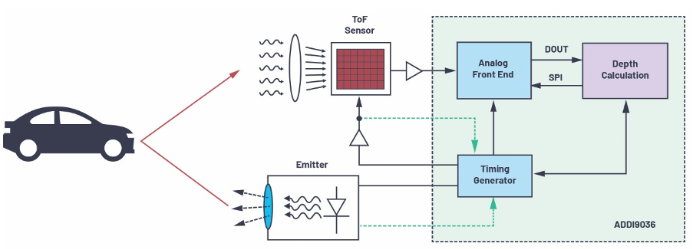
圖2.ToF系統框圖。
測量結果也可能被霧或強烈陽光等環境因素所偽造。環境光抑制有助于后者。
ADI公司(ADI)等半導體制造商提供完整的3D ToF系統,以支持3D ToF解決方案的快速實施。它們將數據處理、激光驅動器、電源管理和軟件/固件集成到一個用于控制電子設備的單元中。其他組件包括發射調頻光信號的發射器和記錄反射信號的檢測器。框圖如圖2所示。
具有集成深度計算的模擬前端(AFE)等組件對想要構建此類系統的任何人來說都有很大的幫助。其中,ADDI9036提供此功能。它是一款完整的 CCD ToF 信號處理器,具有集成半導體激光管驅動器、12 位 ADC 和高精度時鐘發生器,可為 CCD 和激光器生成時序。ADDI9036負責處理來自VGA CCD傳感器的原始圖像數據,以產生深度/像素數據。
審核編輯:郭婷
-
傳感器
+關注
關注
2565文章
53008瀏覽量
767422 -
機器人
+關注
關注
213文章
29748瀏覽量
212876 -
激光
+關注
關注
20文章
3468瀏覽量
67201
發布評論請先 登錄
Analog Devices Inc. ADTF3175 100萬像素飛行時間模塊數據手冊
飛行時間質譜儀數據讀出解決方案

OptiSystem應用:激光雷達系統設計
安森美推出首款飛行時間傳感器HyperluxID系列
重磅新品 | 美芯晟發布全集成直接飛行時間(dToF)傳感器MT3801

使用FDC1004用作短距離報警,電容的檢測極板的大小是否對檢測距離有影響?
集成時間數字轉換器簡化了飛行時間測距應用的設計

艾邁斯歐司朗發布新一代單區直接飛行時間(dToF)傳感器TMF8806
TDC7201適用于激光雷達、測距儀和ADAS中飛行時間應用的時間-數字轉換器數據表

TDC7200 適用于激光雷達飛行時間、磁致伸縮和流量計應用的時間數字轉換器數據表
Moku:Lab應用于雙光頻梳鎖定實現高效精準測距






 工商網監
工商網監
評論