 軟體機械手到底有多軟?
軟體機械手到底有多軟?

與其復雜化機械手的控制策略,不如換成簡單靈活的機械觸手。
抓娃娃機是一種很常見的游樂設備,其中的機器抓手很難成功抓到娃娃。實際上,「抓娃娃」的應用場景類似于在深海中抓取海底的珊瑚、文物等等。這些東西往往非常珍貴且脆弱易碎,因此人們嘗試構建靈活穩定的機械抓手。
當前大多數機械手依靠嵌入式傳感器、復雜的反饋回路或先進的機器學習算法,結合操作員的技能,來抓取易碎、形狀不規則的物體。
現在,來自哈佛大學約翰 · 保爾森工程與應用科學學院(SEAS)的研究人員展示了一種更簡單的方法。他們從大自然汲取靈感,設計了一種新型柔軟的機械抓手,使用一組細長的觸手來纏繞和捕獲物體,類似于水母、章魚收集獵物的方式。
我們先來看一下這個機械手抓取物體的效果,例如抓取一個樹狀物體
可以發現,該機械手利用柔軟觸手易于形變的特點,讓觸手像繩子一樣卷曲并纏繞在物體上,實現了「抓握」的功能。
研究概述
首先,該研究重新思考了機器手與物體互動的方式。論文第一作者 Kaitlyn Becker 介紹稱:「通過利用軟體機器人的自然柔順的優勢,我們設計了一種整體性能大于各部分總和的機械抓手,和一種能夠以最少的規劃和感知適應一系列復雜物體的抓取策略。」其中,機械觸手依靠簡單的充氣來保持形態,不需要傳感、規劃或反饋控制。研究論文發表在美國國家科學院院刊(PNAS)上。
論文地址:https://www.pnas.org/doi/10.1073/pnas.2209819119
和動物的觸手一樣,雖然一根機械觸手很柔弱,但多根觸手組合在一起就可以牢牢抓住沉重且形狀各異的物體。抓手的力量和適應性來自于它與試圖抓住的物體糾纏在一起的能力。
一兩根觸手無法成功抓取物體。
每根機械觸手都是等長的空心橡膠管,這些橡膠管受壓會發生形變并卷曲纏繞在物體上。整個機械手的關鍵原理是觸手的每一次纏繞都會增加抓握的強度;想要釋放物體時,只需對這些觸手減壓,讓它們解開纏繞,就可以放開物體。
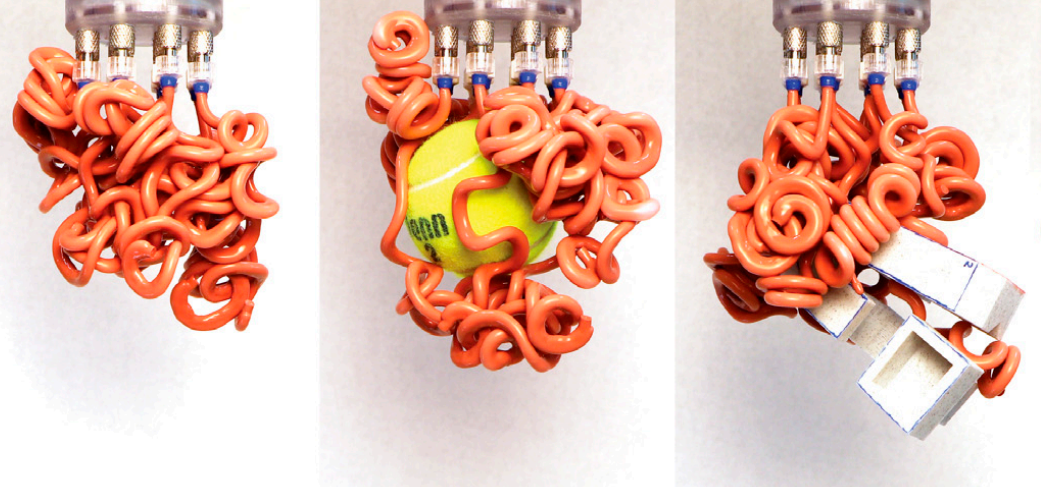
該研究使用模擬和實驗來測試該機械抓手的功能,嘗試抓起一系列物體,包括各種室內植物和玩具。例如抓取環狀物體,并將它平放在桌面上:
從外部橫向抓取一段管狀物體:
還可以從內部抓取同一根管子:

抓取一個球體:

抓手可用于實際應用,以抓取用于農業生產和配送的軟水果和蔬菜、醫療環境中的脆弱組織,甚至倉庫中不規則形狀的物體,例如玻璃器皿。
總的來說,機械手的抓取原理結合了 L. Mahadevan 教授在纏結細絲的拓撲力學方面的研究和 Robert Wood 教授關于軟體機器人抓手的研究。
這種新的機器人抓取方法補充了現有的解決方案,將需要復雜控制策略的簡單傳統夾持器替換為易于控制且形態復雜的細絲觸手,這些觸手可以通過非常簡單的控制進行操作,擴大了機械抓手的抓取范圍。
審核編輯 :李倩
-
機器人
+關注
關注
213文章
29718瀏覽量
212758 -
機械手
+關注
關注
7文章
345瀏覽量
30391 -
機器學習
+關注
關注
66文章
8501瀏覽量
134563
原文標題:軟體機械手到底有多軟?
文章出處:【微信號:indRobot,微信公眾號:工業機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄


案例分析,搬運機械手如何選擇電機?

24位或者說高分辨率的AD到底有什么用呢?
差分輸入和和單端輸入在本質上到底有什么區別?
高鐵站網約車數智出行到底有多智能?
機械手 OEM 的應用
“快、準、穩”——阿普奇AK5在機械手領域的應用解決方案






 工商網監
工商網監
評論