") 什么是行人航位推算 (PDR)?
什么是行人航位推算 (PDR)?
您有沒有過這樣的經(jīng)歷:您正跟著手機的 GPS 在街上行走,突然間 GPS 系統(tǒng)無法確定您的位置?也許此時您剛好在城市中的一排摩天大樓附近,或是在樹林里一條人跡罕至的小路上。無論如何,此時周邊環(huán)境遮擋了您的 GPS 信號。行人航位推算技術(shù)就是專門針對此類情景的一項有用技術(shù)。
航位推算就是指在沒有任何外部參考的情況下,利用已知起始位置,結(jié)合隨著時間的推移而估算的移動速度和前進方向,來推定未來到達位置的過程。將這個概念延伸到人類運動領(lǐng)域,特別是行走或跑步的情況,就是行人航位推算。
 ?
?行人航位推算 (PDR) 是怎樣運作的?
行人航位推算使用慣性感應(yīng)(加速度計、陀螺儀,有時也會使用磁力計)來估計速度和方向。步行的基本模型包括步數(shù)、步長和方向。如果您知道步長和步數(shù),就可以推斷出距離。再加上方向,就能得到一個完整的航位推算輸出結(jié)果。
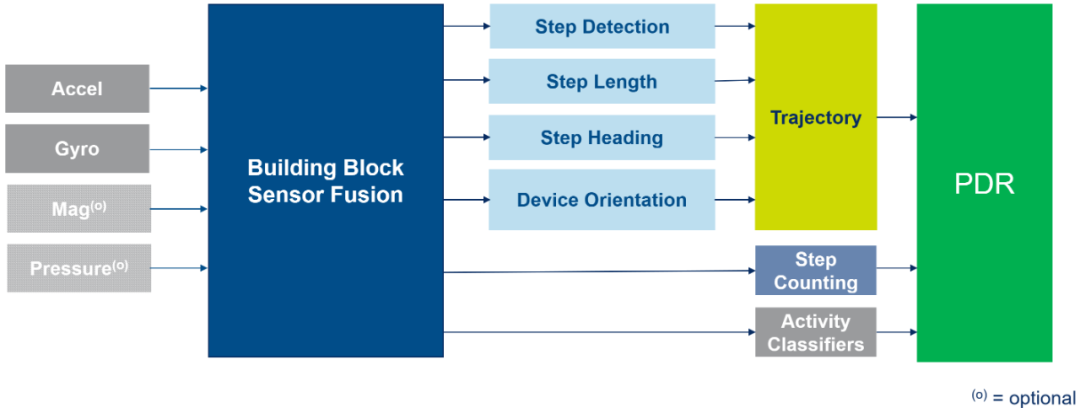
通過融合多個傳感器輸出,PDR/行人航位推算算法即可計算出基本構(gòu)成元素。這包括步數(shù)檢測、步長、步行方向和設(shè)備方向(您是將手機握在手里,還是放在口袋里?)這些基本構(gòu)成元素拼湊在一起,就能確定總體軌跡。與其他有關(guān)計步和活動分類(您在走路、跑步還是靜止不動?)的輸出結(jié)果相結(jié)合,就能了解您已經(jīng)行進的距離。
?PDR 有哪些局限性,解決方案是什么
在 GPS 不可靠的情況下了解自己的位置,這是行人航位推算的主要好處之一。而且,由于它基于慣性感應(yīng),因此不必依賴外部測量源(如衛(wèi)星)。但如果 PDR 如此出色,為什么還要費心費力去使用 GPS 呢?
我們得承認,PDR 有其自身的局限性。不依賴外部資源是一把雙刃劍。這意味著它不會迷失方向,但也意味著它無法自行糾錯。它可以做出估計(也就是航位推算的“推算”部分)。使用 GPS,在信號較好時,系統(tǒng)可以隨著時間的推移校正定位。
要在短期內(nèi)確定方向,IMU 的陀螺儀角位置信息比加速度計或磁力計更可靠。它能在短期內(nèi)輸出一致、可用的數(shù)據(jù)。磁力計或加速度計也可以確定方向,但需要更長時間、更穩(wěn)定的測量。同樣,航位推算在短期內(nèi)也很有用。GPS 則可以在更長的時間內(nèi)提供穩(wěn)定的位置測量。主要優(yōu)點是測量能力的補充。PDR 算法是可靠定位解決方案中不可或缺的組成部分。
?實時定位系統(tǒng) (RTLS) 和其他優(yōu)點/缺點
實時定位系統(tǒng) (RTLS) 是另一種用于確定位置的系統(tǒng)。GPS 在室外環(huán)境中非常有用,RTLS 在建筑物或其他密閉空間內(nèi)有著類似的實用價值。比如追蹤商品在庫房里的位置、顧客在購物中心內(nèi)的位置或患者在醫(yī)院中的位置,這都是 RTLS 非常有用并且 GPS 無法可靠覆蓋的應(yīng)用場景。
實時定位系統(tǒng)最常用的技術(shù)包括超寬帶、藍牙和 Wi-Fi。每種技術(shù)的信號各有不同,但基本原理保持不變。選定信號類型都有許多固定參考點。隨后用戶攜帶一個標簽(例如小型收發(fā)器或手機),該標簽可以在這些參考點之間來回發(fā)送信號,以便實現(xiàn)定位。
大多數(shù) RTLS 的工作原理是確定相對于標簽的信號強度,隨后在至少有 3 個參考點的情況下即可確定位置。但有些技術(shù)不需要多個參考點或錨點。超寬帶可使用單個錨點確定位置,無需進行三角定位。藍牙可以確定到達角和離開角。如果使用更多的參考點,系統(tǒng)的準確性將進一步提高。這些系統(tǒng)相對一致且具有確定性;但與慣性系統(tǒng)相比,它們的功耗也很高。而在這方面,PDR 再度顯現(xiàn)出顯著優(yōu)勢。如果 RTLS 與 PDR 配合,打造成一種更為全面的解決方案,它就能降低自身系統(tǒng)更新的頻率,并依靠 PDR 來“填補空白”。
省電是一項非常重要的優(yōu)勢,但 PDR 對 RTLS 或 GPS 系統(tǒng)還有其他好處。為完整起見,我在下面再次給出優(yōu)勢列表,不過這次匯總的是在任何基于位置的系統(tǒng)中添加 PDR 的好處:
-
更低的功耗:降低 RTLS/GPS 更新的頻率,并依靠功耗較低的 PDR 算法,從而為標簽/設(shè)備省電。
-
填補信號覆蓋空白:如果系統(tǒng)找不到標簽(原因可能是存在遮擋、延遲問題、超出范圍)設(shè)備無法連接到衛(wèi)星,則可以使用 PDR 估算值來填補缺失的數(shù)據(jù)。
-
更高的系統(tǒng)精度:RTLS 和 GPS 系統(tǒng)專門關(guān)注定位,但不會直接跟蹤方向或速度。與其他系統(tǒng)相比,行人航位推算可通過更高的頻率提供更高級的粒度層,從而產(chǎn)生更平滑的路徑。例如,在條件最優(yōu)的情況下,GPS 的精度為 3 米。
-
降低安裝成本:使用 PDR 解決方案時,RTLS 工作所需的信標更少。
切記,PDR 確實是一項出色的技術(shù),但最適合作為各種基于位置的技術(shù)的補充。它可以單獨使用,但是如果沒有任何真實信號為其提供支持,隨著時間的推移,它將不再可靠。但如果在短期內(nèi)使用,它可以為其他系統(tǒng)增添不少好處。CEVA 深耕傳感器融合領(lǐng)域已有 20 多年,在我們原本就高度精確的慣性傳感器融合的基礎(chǔ)上,開發(fā)了強大的 PDR 算法。
歡迎掃描下方二維碼聯(lián)系我們,進一步了解我們的算法并觀看演示

原文標題:什么是行人航位推算 (PDR)?
文章出處:【微信公眾號:CEVA】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
dsp
+關(guān)注
關(guān)注
555文章
8141瀏覽量
355057 -
藍牙
+關(guān)注
關(guān)注
115文章
6023瀏覽量
173117 -
CEVA
+關(guān)注
關(guān)注
1文章
189瀏覽量
76416
原文標題:什么是行人航位推算 (PDR)?
文章出處:【微信號:CEVA-IP,微信公眾號:CEVA】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
南方測繪與航科院中宇公司達成合作
快速部署!米爾全志T527開發(fā)板的OpenCV行人檢測方案指南
航智2024年終盛典圓滿落幕,攜手共筑2025新篇章!

通過AD芯片的哪些參數(shù)可以推算出對AD芯片供電的電源的紋波和噪聲的要求啊?
智能倉庫風(fēng)險管控:AGV叉車與行人協(xié)同作業(yè)指南

益航科技上市啟動會暨航旅小U2.0新品發(fā)布會圓滿舉辦

航順HK32MCU在電機行業(yè)應(yīng)用與布局

ATGM332D-F8S單北斗多頻車載航位推算模塊功能與應(yīng)用選型
ATGM332D-F8S:低功耗、高集成度單北斗多頻車載航位推算模塊
航電創(chuàng)新 驅(qū)動未來!2024深圳eVTOL展航電展—探索低空經(jīng)濟新藍圖

昂科燒錄器支持HangShun航順芯片的32位微控制器HK32F030C8T6






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論