 Tinker Board 2S系統與軟件安裝設定
Tinker Board 2S系統與軟件安裝設定

/前一篇開箱文介紹了Tinker Board 2S / 2GB的相關硬件規格,可以看出TinkerBoard 2S / 2GB其實在硬件性能方面的已經具備不錯的條件,此外,開箱文的介紹里,也提到了Tinker Board 2S采用了aarch64的操作系統架構,以Debian 10 Linux的LXDE桌面環境,更讓使用者有著相當不錯的GUI使用體驗。/
Tinker Board 2S在官方網站上提供了Debian10 Linux操作系統給用戶進行安裝,相關LXDE桌面環境的套件軟件程序,都有相當完整的支持,本文將會著眼在Tinker Board 2S應用在AI范疇中,所應該要在后續的套件軟件程序的安裝介紹,在這次的系統安裝測試過程,我們發現了在Tinker Board 2S安裝的Debian 10 Linux操作系統里,為了安裝一些常用的AI支持套件程序,在安裝過程中仍要補足許多缺漏的相依套件程序,甚至在測試安裝的過程里,也發現了有部分的相依套件程序有斷裂的問題,甚至無法單純采用pip3 install或apt-get install的方式進行相依套件程序的安裝,得要透過一些其他套件程序進行修補斷裂的安裝,這部分將會在后續的文章中詳細說明。
本文將會針對以下這些AI應用程序設計中常用的套件程序安裝進行說明:
1.nano (用于簡易文本編輯器操作)
2.OpenCV 4.5.0 (用于相關視覺影像的接口操作)
3.imutils (用于視覺圖像處理的接口操作)
4.pillow (用于視覺圖像處理的接口操作)
5.tkinter (用于圖形用戶界面 GUI 程序設計)
6.Tensorflow 2.4.1 與Tensorflow-Lite Runtime 2.5.0 (用于神經網絡運算)
7.Python3-Coral (用于GoogleCoral 邊緣張量處理單元Edge-TPU加速器運算)
8.SciKit-Learn (用于神經網絡運算)
一、安裝簡易文本編輯器nano
由于在許多的終端機操作環境下需要快速編修文件,采用精巧且功能完整的文本編輯器nano,一直是許多系統操作者的最愛之一,以下說明安裝流程:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install nano
二、安裝GTK-2.0相依套件libgtk2.0-dev
本次安裝測試的過程當中,在安裝OpenCV 4.5.0套件程序時,發生了相依套件斷裂的問題,在Tinker Board 2S的Debian 10 Linux系統中因為沒有安裝GTK-2.0 的libgtk2.0-dev套件程序,這將導致在OpenCV4.5.0因cmake無法將 libgtk2.0-dev相依套件進行編譯設定,雖然在后續的make流程都能完成,但最后會在最后Python程序運行時間無法正確使用如imshow、putText等畫面顯示或繪圖的函數,并且會在運行時間報錯,并且提示需要重新進行cmake。
為了將libgtk2.0-dev相依套件程序安裝至系統,筆者初期使用sudo apt-get install libgtk2.0-dev這種方式安裝相依套件程序,但系統卻又報錯,表示還有許多其他相關相依套件有「相依斷裂」的問題,筆者嘗試再以sudo apt-get install去安裝那些相依套件程序,卻依然發現更多的「相依斷裂」,更糟糕的是還發生「循環相依」,所謂「循環相依」表示其他的相依套件程序又循環相依libgtk2.0-dev。
為了解決這種「相依斷裂」與「循環相依」的問題,最后只能透過額外安裝「套件安裝設定程序」的方式來解決,本次教學使用的是安裝「aptitude」套件程序來解決這個問題。
透過「aptitude」套件程序便可以進行libgtk2.0-dev套件程序安裝,以下說明安裝流程:
sudo apt-get install aptitude
sudo aptitude install libgtk2.0-dev
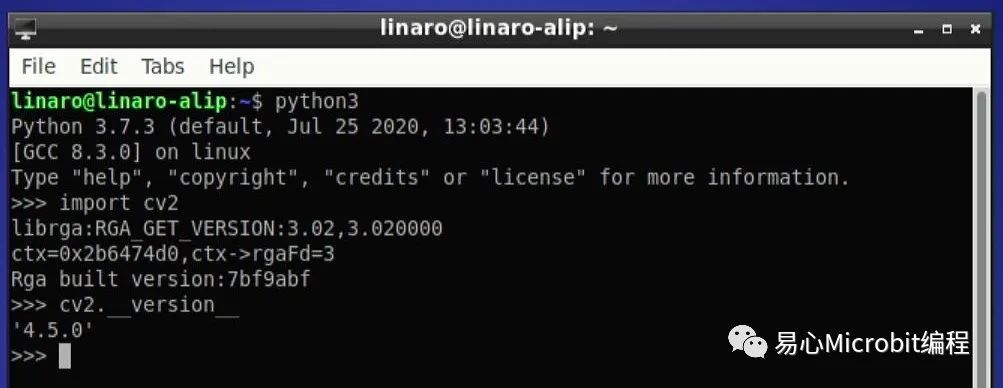
三、安裝OpenCV 4.5.0套件程序
在本篇教學采用OpenCV 4.5.0進行視覺影像接口處理,筆者曾嘗試以sudo apt-get install python-opencv進行套件程序的安裝,結果經過檢查發現,以這種方式安裝的OpenCV版本是3.6版,雖然簡單Python程序函數還是可以執行,可是當遇到更進階的函數如DNN等相關進階應用時,便會產生函數缺漏的問題,有鑒于此,筆者選擇重新以Build from Source的方式進行安裝。
在這里要特別強調一個重要關鍵,在安裝OpenCV 4.5.0套件程序之前,「必須」將前述的GTK-2.0相依套件libgtk2.0-dev先行安裝完成,切莫跳過這個重要步驟。
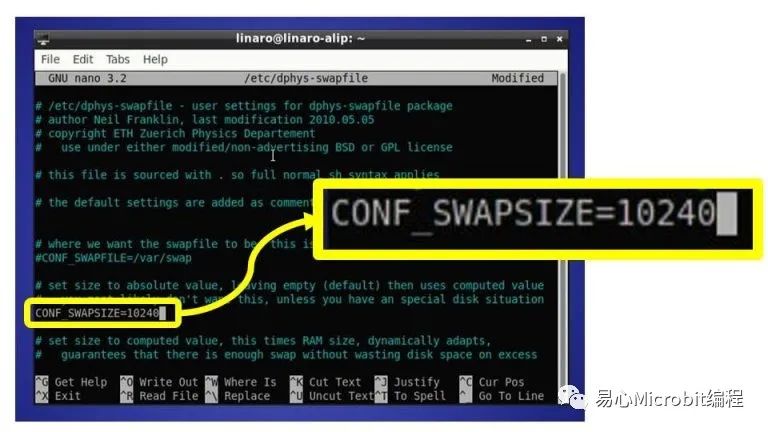
由于OpenCV 4.5.0的安裝過程需要大量的內存運作空間以進行后續的make流程,因此必須先行安裝虛擬內存的套件程序,并且將虛擬內存設為10240MB,并且將Tinker Board 2S重新啟動,以下說明虛擬內存設定流程:
sudo apt-get update
sudo apt-get upgrade
#安裝dphys-swapfile套件程序
sudo apt-get install dphys-swapfile
#以nano編輯/etc/dphys-swapfile配置文件案
sudo nano /etc/dphys-swapfile
#尋找#CONF_SWAPSIZE= 字符串內容,并且將批注符號# 取消。
#設定CONF_SWAPSIZE=10240
#離開nano文本編輯器
#重新啟動
sudo reboot
下載并編譯安裝OpenCV 4.5.0,請注意,這個階段的安裝時間非常久,筆者大約安裝了近4小時,且在make階段時Tinker Board 2S的散熱片會產生高溫,筆者嘗試使用make -j2或make -j4等多核心的編譯指令,雖然可以加快make流程,但是這種編譯方式會讓CPU的散熱片的溫度飆升,甚至導致熱當機的狀況很多次,造成make失敗多次,因此筆者建議只要采用make這種單核心的編譯為佳,且在編譯過程務必確保電源穩定,且適當以電風扇在旁邊幫助散熱,雖然時間很久,但可以確保編譯過程安全無誤,以下說明OpenCV 4.5.0的安裝流程:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install cmake gitlibgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install libjpeg-dev libpng-dev
sudo apt-get install libavcodec-devlibavformat-dev libswscale-dev
sudo apt-get install libgtk2.0-devlibcanberra-gtk* libgtk-3-dev
sudo apt-get install python3-dev python3-numpypython3-pip
sudo apt-get install libtbb2 libtbb-devlibdc1394-22-dev
sudo apt-get install libv4l-dev v4l-utils
sudo apt-get install libopenblas-devlibatlas-base-dev libblas-de
sudo apt-get install liblapack-dev gfortranlibhdf5-dev
sudo apt-get install libprotobuf-devlibgoogle-glog-dev libgflags-dev
sudo apt-get install protobuf-compiler
sudo apt-get install qt5-default
wget -O opencv.ziphttps://github.com/opencv/opencv/archive/4.5.0.zip
wget -O opencv_contrib.ziphttps://github.com/opencv/opencv_contrib/archive/4.5.0.zip
unzip opencv.zip
unzip opencv_contrib.zip
mv opencv-4.5.0 opencv
mv opencv_contrib-4.5.0 opencv_contrib
cd ~/opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE
-D CMAKE_INSTALL_PREFIX=/usr/local
-D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib/modules
-D ENABLE_NEON=ON
-D WITH_OPENMP=ON
-D BUILD_TIFF=ON
-D WITH_FFMPEG=ON
-D WITH_TBB=ON
-D BUILD_TBB=ON
-D BUILD_TESTS=OFF
-D WITH_EIGEN=OFF
-D WITH_GSTREAMER=OFF
-D WITH_V4L=ON
-D WITH_LIBV4L=ON
-D WITH_VTK=OFF
-D WITH_QT=OFF
-D OPENCV_ENABLE_NONFREE=ON
-D INSTALL_C_EXAMPLES=OFF
-D INSTALL_PYTHON_EXAMPLES=OFF
-D BUILD_NEW_PYTHON_SUPPORT=ON
-D BUILD_opencv_python3=TRUE
-D OPENCV_GENERATE_PKGCONFIG=ON
-D BUILD_EXAMPLES=OFF
-D WITH_GTK=ON ..
make
sudo make install
sudo ldconfig
make clean
至 .bashrc 設定OpenCV 4.5.0路徑,安裝完成OpenCV 4.5.0之后,必須要設定相關執行路徑,若跳過這個步驟,會導致Python程序在import cv2時產生allocation memory 報錯,以下說明 .bashrc 路徑設定方式:
cd ~
#以nano文本編輯器編輯.bashrc 配置文件
sudo nano ~/.bashrc
#到文件末端將以下敘述補在最后一行
exportLD_PRELOAD=/usr/lib/aarch64-linux-gnu/libgomp.so.1

#執行 .bashrc 內容
source ~/.bashrc
四、安裝其他視覺圖像處理與圖形用戶界面套件程序
#安裝pillow套件程序
cd ~
sudo apt-get update
sudo apt-get upgrade
pip3 install setuptools
pip3 install pillow
#安裝tkinter套件程序
cd ~
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install python3-tk
sudo apt-get install python3-pil.imagetk
#安裝imutils套件程序
cd ~
sudo apt-get update
sudo apt-get upgrade
pip3 install imutils
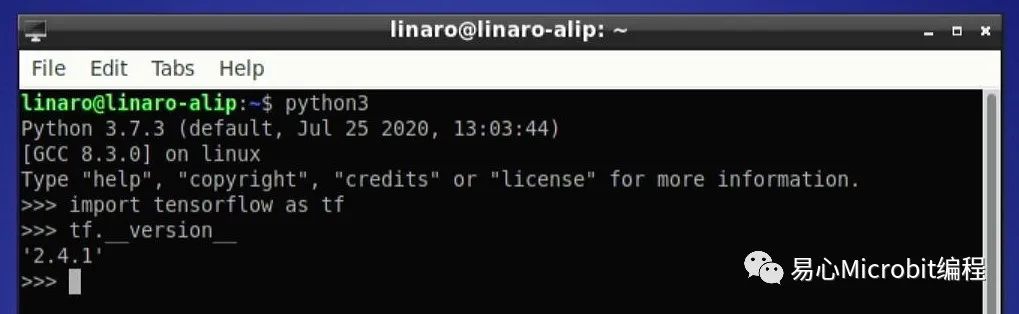
五、安裝Tensorflow 2.4.1 神經網絡運算套件程序
Tinker Board 2S 具有強大的CPU與GPU運算效能,可進行神經網絡運算,搭配OpenCV可以進行各種AI影像辨識的應用,依照Tinker Board 2S的各種硬件規格,筆者認為神經網絡的框架可采用Tensorflow 2.4.1來進行神經網絡的推論(Inference)運算,以下說明套件程序安裝流程:
#更新操作系統套件信息
sudo apt-get update
sudo apt-get upgrade
#更新安裝pip3套件程序
sudo apt-get install python-pip python3-pip
#移除舊版Tensoflow套件程序
sudo pip uninstall tensorflow
sudo pip3 uninstall tensorflow
#安裝各種系統相依套件程序
sudo apt-get install gfortran
sudo apt-get install libhdf5-devlibc-ares-dev libeigen3-dev
sudo apt-get install libatlas-base-devlibopenblas-dev libblas-dev
sudo apt-get install liblapack-dev
#安裝各種Python3各種套件程序
sudo -H pip3 install --upgrade setuptools
sudo -H pip3 install pybind11
sudo -H pip3 install Cython==0.29.21
sudo -H pip3 install h5py==2.10.0
#安裝下載工具
pip3 install gdown
sudo cp ~/.local/bin/gdown/usr/local/bin/gdown
#下載Tensorflow 2.4.1套件程序安裝文件
gdownhttps://drive.google.com/uc?id=1WDG8Rbi0ph0sQ6TtD3ZGJdIN_WAnugLO
#安裝Tensorflow 2.4.1套件程序
sudo -H pip3 installtensorflow-2.4.1-cp37-cp37m-linux_aarch64.whl
六、安裝Tensorflow-Lite Runtime 2.5.0 套件程序
對于Tinker Board 2S / 2GB而言,由于受限于主存儲器僅有2GB的緣故,因此對于神經網絡進行推論運算時所需使用的主存儲器容量,就必須要謹慎運用這有限的容量,若需要在神經網絡推論時有較高的運算效能,往往就必須要選擇神經網絡模型規模較小的模型格式,在Tensorflow族系里有種Tensorflow-Lite格式就是一種模型規模較小的格式,在Tensorflow的原廠網站里也特別將Tensorflow-Lite格式定義適用于物聯網IoT應用的場合當中,以下說明套件程序安裝的方式:
cd ~
sudo apt-get update
sudo apt-get upgrade
pip3 installhttps://github.com/google-coral/pycoral/releases/download/v1.0.1/tflite_runtime-2.5.0-cp37-cp37m-linux_aarch64.whl
七、安裝google Coral Edge-TPU Pthon套件程序
若想在邊緣裝置提升神經網絡的運算效能,常會在邊緣運算裝置上外加神經網絡運算加速裝置,最常用的做法,便是透過USB連接神經網絡運算加速裝置的方式進行擴充,Tinker Board 2S有強大的USB 3.0接口可以運用,筆者為了能夠在Tinker Board 2S上充分發揮Tensorflow-Lite的效能,因此選擇透過google推出的Coral Edge-TPU USB Accelerator安裝在Tinker Board 2S上,透過Edge-TPU強大的運算效能,讓AI的各種應用都能有高速的反應。
以下說明Python3-Coral套件程序安裝方式:
echo "debhttps://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudotee /etc/apt/sources.list.d/coral-edgetpu.list
curlhttps://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -
sudo apt-get update
sudo apt-get install libedgetpu1-std
sudo apt-get install python3-pycoral
八、安裝其他支持神經運算的套件程序SciKit-Learn
cd ~
sudo apt-get update
sudo apt-get upgrade
sudo pip3 install sklearn
以上是針對Tinker Board 2S在后續應用在AIoT主題開發所安裝的各種套件程序安裝教學,筆者將會在后續文章中介紹Tinker Board 2S在神經網絡運算的效能,將會透過筆者設計的Python3范例程序進行本篇各種套件程序的測試效能,敬請各位讀者拭目以待啰!
審核編輯 :李倩
-
軟件
+關注
關注
69文章
5152瀏覽量
89210 -
程序
+關注
關注
117文章
3826瀏覽量
82965 -
編輯器
+關注
關注
1文章
822瀏覽量
32023
原文標題:Tinker Board 2S系統與軟件安裝設定
文章出處:【微信號:易心Microbit編程,微信公眾號:易心Microbit編程】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
Cadence SPB OrCAD Allegro24.1安裝包
TPS65086 可配置的多軌PMIC,適用于2S和3S鋰離子電池作的設備或非電池供電的設備數據手冊
【瑞薩RA2L1入門學習】+e2_studio軟件安裝及使用
如何通俗理解芯片封裝設計

在Linux下安裝軟件有哪些方法

休眠時將adxl355的電斷掉再重新上電,上電后會延時2s去讀值再斷電,有概率讀到的FIFO值是7FFFF,怎么解決?
Ubuntu系統的虛擬機安裝步驟 如何在Ubuntu系統上編譯軟件
如何在Windows中安裝Ubuntu系統
ADS1018EVM開發板連接軟件出錯的原因?怎么解決?
Efinity軟件安裝-v5
USB充電解決方案,適用于2節(2S)分立電池,使用帶電池平衡的BQ25887






 工商網監
工商網監
評論