") 基于直線空間變換的線結構光光平面標定方法
基于直線空間變換的線結構光光平面標定方法
線結構光非接觸式測量技術因測量精度高得到了廣泛的應用,而其光平面標定結果會直接影響系統(tǒng)的測量精度。為了得到較高的標定精度,很多專家學者對此進行了研究。現在主要的標定方法有基于平面靶標法、基于平面直線擬合及直線消影原理法,其中關于平面靶標法的研究較為廣泛。
研究團隊提出了一種基于直線空間變換的線結構光光平面標定方法。該方法根據平面單應性矩陣快速求解靶標面的二維直線方程,并根據靶標坐標系的特殊性構建三維Plücker矩陣形式直線方程,利用直線進行光平面擬合;充分利用整條激光線數據,不需要求解靶標面方程和投影面方程,另外采用直線進行擬合時,利用滑動平均法和正交回歸擬合法,保證了前期數據點的抗噪性,增加了標定結果的準確性,從而所提方法滿足實際線結構光的測量要求。
一、線結構光視覺測量模型
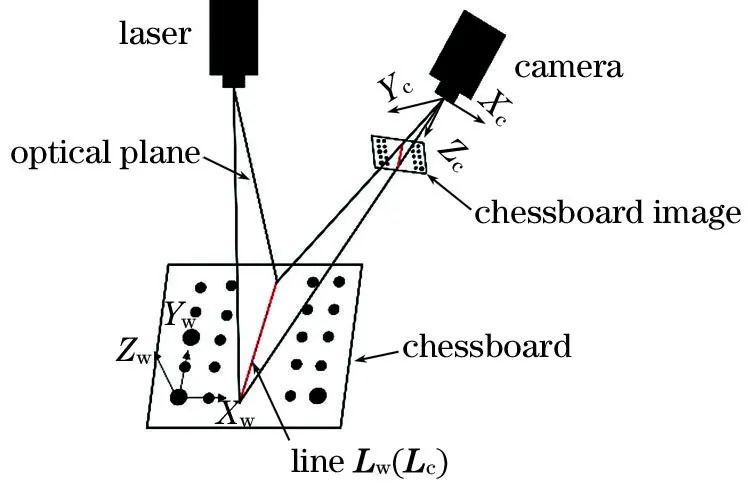
線結構光測量裝置主要由激光投射器和相機組成,其幾何結構如下圖所示。OwXwYwZw為世界坐標系, OcXcYcZc為相機坐標系, ouv為圖像坐標系,點 P為激光線與待測物體交線上任意一點,其在圖像平面上對應的投影為點 p。

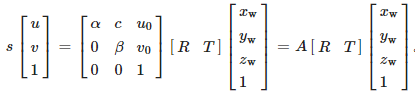
根據建立的相機成像透視模型,圖像坐標系下的點 (u,v)經相機射影變換后與世界坐標系下的點 (xw,yw,zw)的對應關系為
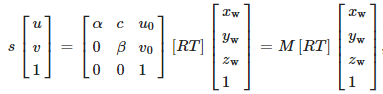
相機坐標系下,線結構光的光平面方程可表示為:
A?xc+B?yc+C?zc+D=0
二、基于直線空間變換的光平面標定方法
2.1 平面光條中心線提取
實際生產環(huán)境中,光條成像受外界光源、靶標面不均勻反射影響,存在很多噪聲,它們會影響光條中心的提取。采用互相關算法,利用鄰域光條紋的相關聯性提取光條,即在場景本身深度與物體表面反射特性未發(fā)生突變的場合下,條紋灰度的變化是相對平穩(wěn)的。因此,相鄰條紋中心點間的坐標位置與灰度值均具有一定的相似性,利用這種相似性可以在很大的程度上降低噪聲的干擾,從而能夠提高中心條紋提取精度。以行為單位,使用灰度重心法提取光條中心。另外在光條作用于平面成像為一條直線的前提下,利用五點滑動平均(5MA)法對提取的光條中心點進行預處理,實現過程如下圖所示。
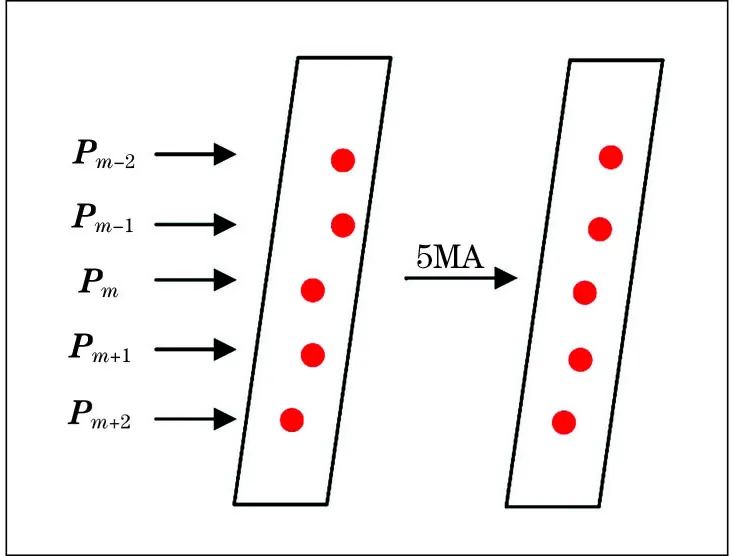
5MA法取鄰近5點均值來消除光條點的隨機誤差,即由當前點 p=(xm,ym)與上下臨近4個點的平均值確定 p'=(x'm,y'm),公式為:
直線擬合常用方法有代數距離和歐氏距離2種。代數距離只考慮光條點集 y與觀察值 y˙之間的距離約束,忽略了 x方向的誤差,且無法表示豎直方向的直線,據文獻,正交回歸法具有較好的擬合效果與旋轉不變性。為此采用點法式正交回歸法擬合光條中心線,以點到直線的歐氏距離建立新約束函數 e:

2.2 空間直線方程求解
在二維射影變換中,平面直線方程 a?u+b?v+c=0的齊次表達式為:
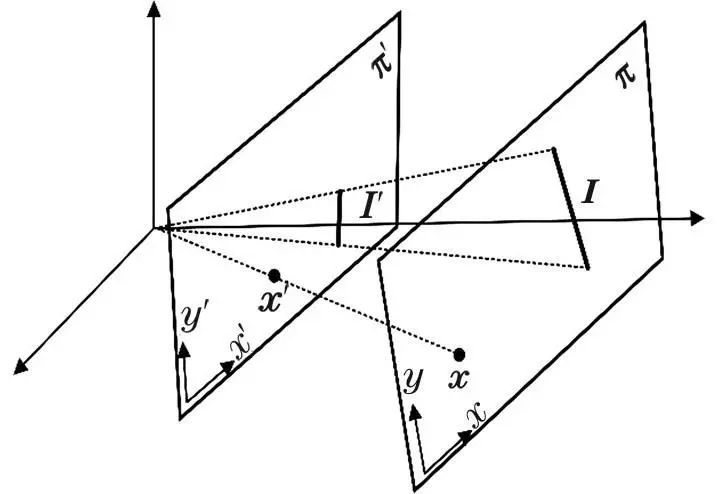
滿足中心投影映射的兩個平面之間存在單應性矩陣 H變換關系,如圖3所示,兩平面中對應點 x'與 x滿足的對應關系為:

利用圖像上光條中心點與靶標面上點之間的單應性關系和直線方程的齊次表達式,可推導得到兩平面上光條中心線單應性變換關系為:

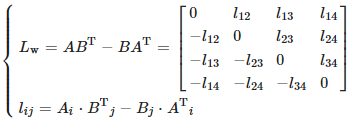
如圖4所示,在建立的空間直線變換模型中,靶標面上所有點具有特殊性,其在靶標空間坐標系中滿足zw=0,為此可將原先的二維直線方程上的點全部拓展至三維。選取光條上任意兩點 A=(xa,ya,za,1)T,B=(xb,yb,zb,1)T,其中za=zb=0,將空間直線的方程組解析式轉換成Plücker矩陣形式,便于矩陣運算,直線的Plücker表達形式 Lw不受取點大小影響。Lw的表達式為:
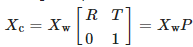
靶標與相機坐標系的轉換關系可用相機成像模型(8)式求解得到:
圖像上圓形標記點與靶標坐標系下的圓形標記點之間存在N點透視關系PnP(perspective N-point),因此可建立兩者之間的重投影誤差函數,使用Levenberg-Marquardt算法優(yōu)化重投影誤差函數,獲得非線性最優(yōu)解 R和 T。根據坐標系轉換,得到了兩坐標系下對應點的關系,表達式為:
進一步可推出空間直線變換對應關系為:

2.3 光平面方程計算
激光線 Lc為光平面 π與靶標平面交線,其與光平面共面,根據線面約束方程,可知:
Lc?π=0
多次移動靶標平面( n≥2),得到多組光平面上的直線 Lci,建立線面方程組:
LT?π=0,L=(Lc1,Lc2,…,Lcn)
由于參與擬合光條直線方程的數據存在提取誤差,可增加激光線數量,將多個線面約束方程求解問題轉換成超靜定齊次方程組的最小二乘解問題,利用SVD分解 L(L=UDVT),其中 U為酉矩陣, D為奇異值沿對角線從大到小構成的對角矩陣, V為酉矩陣。D中最小奇異值在 VT對應的特征向量為平面方程的系數 π,從而完成光平面方程參數求解。
三、試驗結果
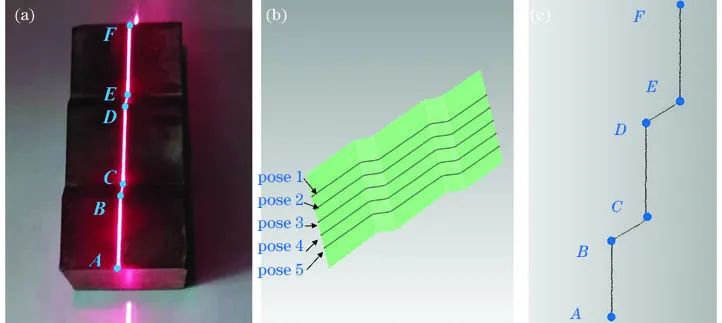
標準臺階塊實驗。(a)臺階塊及特征點;(b)臺階點云;(c)截面形狀
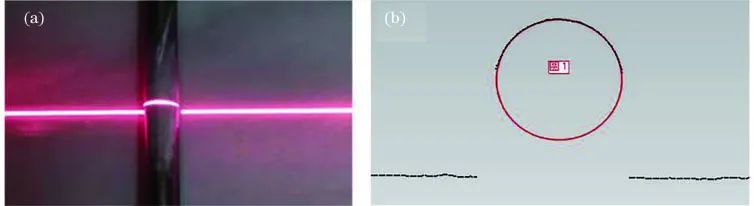
圓柱實驗。(a)圓柱樣件;(b)擬合圓
作者:翟鵬, 崔海華, 胡廣露, 張益華, 靳宇婷, 黃怡.
審核編輯:郭婷
-
激光
+關注
關注
20文章
3426瀏覽量
65826 -
相機
+關注
關注
4文章
1434瀏覽量
54487
原文標題:視覺 | 面向線結構光測量的直線空間變換光平面標定方法
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
PanDao應用:輸入中頻空間公差,最小中頻波長
JCMsuite應用:孤立線柵
JCMsuite應用:一維周期線柵
《聊一聊ZXDoc》之汽車標定、臺架標定、三高標定

永磁直線同步電機建模、特性分析及推力控制
一種分段氣隙的CLLC變換器平面變壓器設計
永磁同步直線電機的粒子群PID空間矢量控制
測出直線度數據后 如何評估直線度誤差的大小、分布和趨勢?
全長直線度和米直線度如何測量?
JCMsuite應用:傾斜平面波傳播透過光闌的傳輸
直線模組安裝調試與要點






 工商網監(jiān)
工商網監(jiān)
評論