 航天外測系統概念與組成
航天外測系統概念與組成
航天外測系統概念與組成
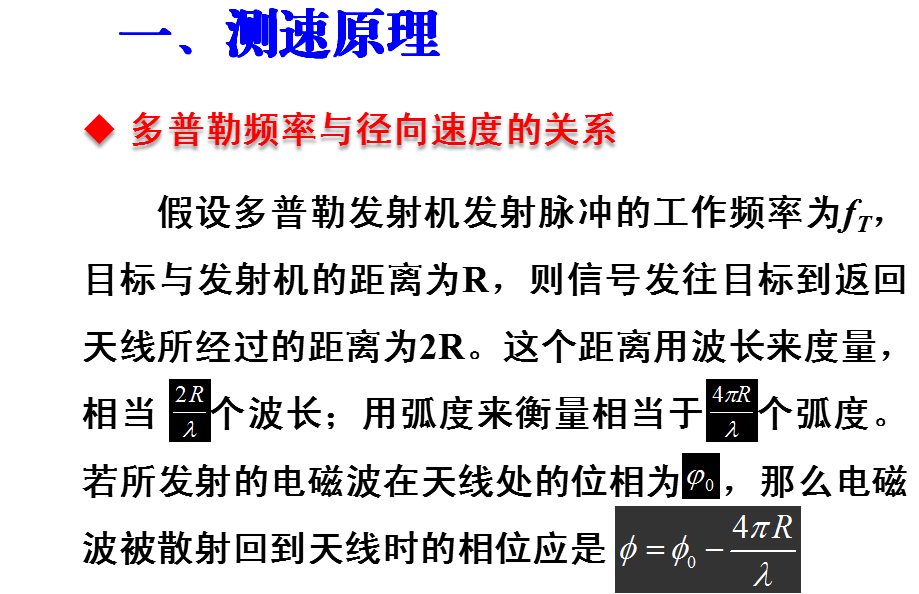
利用雷達、光學等設備從導彈、運載火箭外部測量其飛行參數的專用測量系統。外彈道測量系統包括無線電跟蹤測量系統和光學跟蹤測量系統。外彈道測量系統通過地面測量設備(如雷達、光學測量設備等)單獨或與飛行器上的合作目標(如應答機、信標機、光學合作目標等)配合對飛行器進行觀測,以獲得它們的飛行軌跡參數或變換到某一坐標系中的位置和速度參數。
外彈道測量設備主要包括:
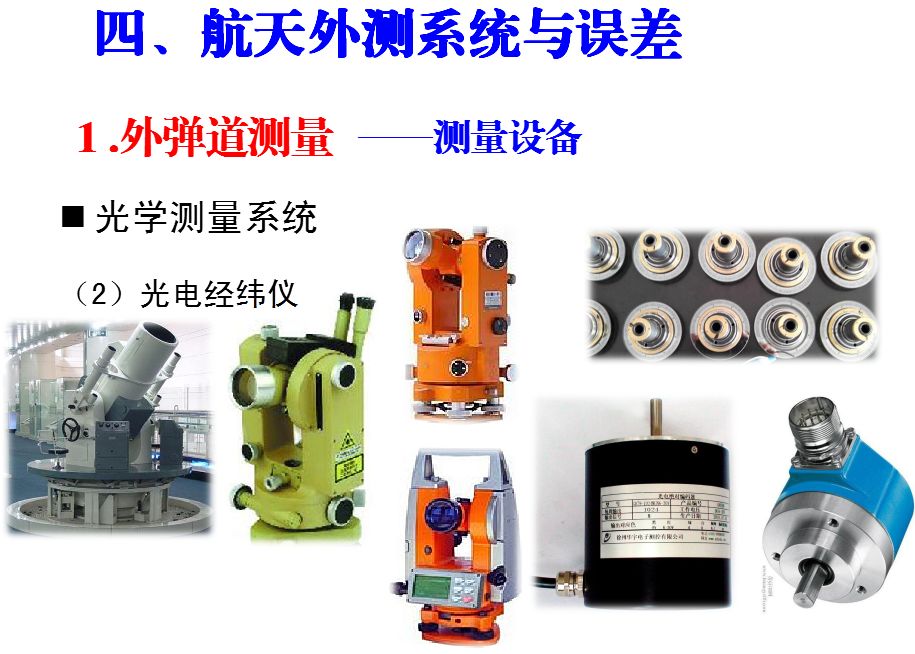
光學測量系統-高速攝影儀系統、高速電視測量儀系統、光電經緯儀系統
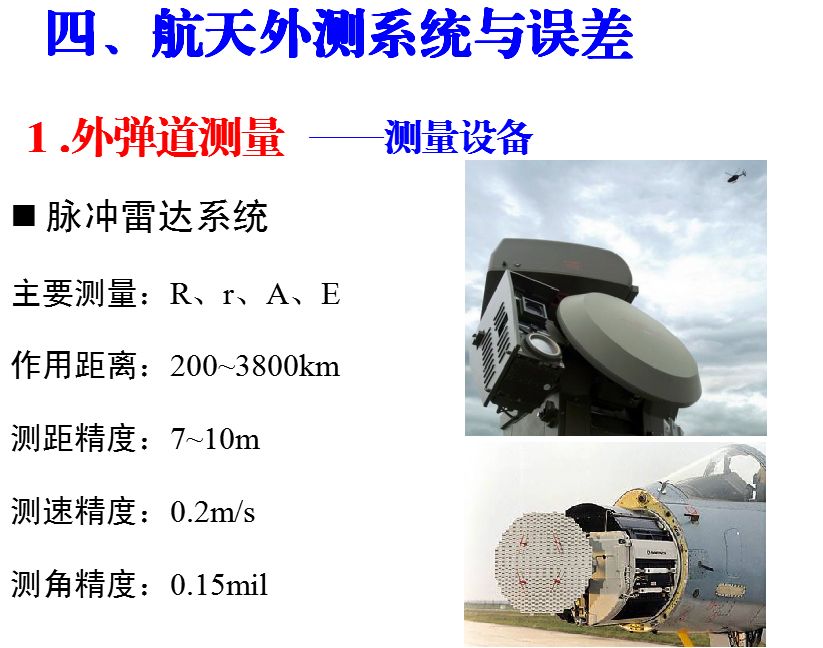
無線電測量系統-脈沖雷達系統、連續波干涉儀系統、 S頻段統一測控系統
GNSS測量系統-全球衛星導航定位系統
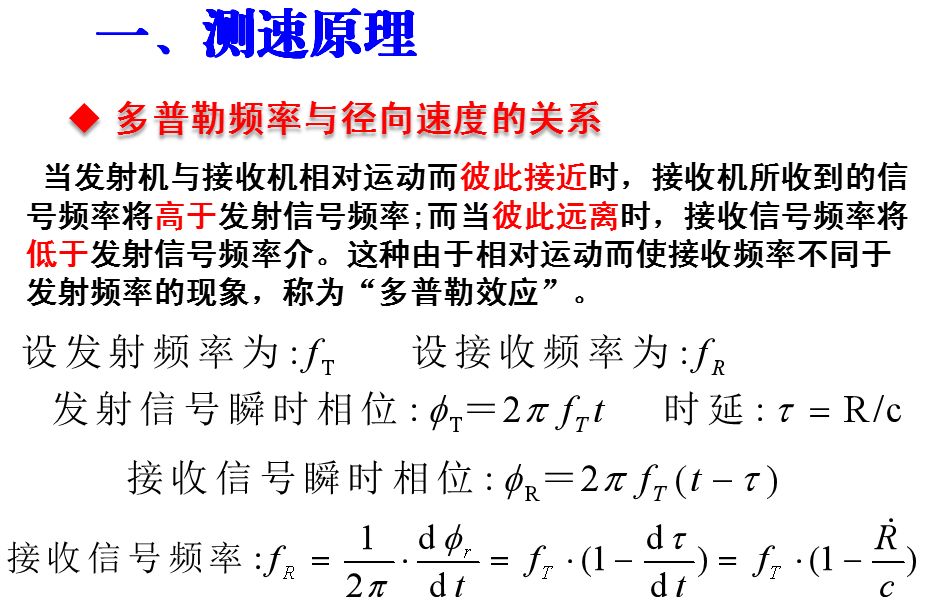
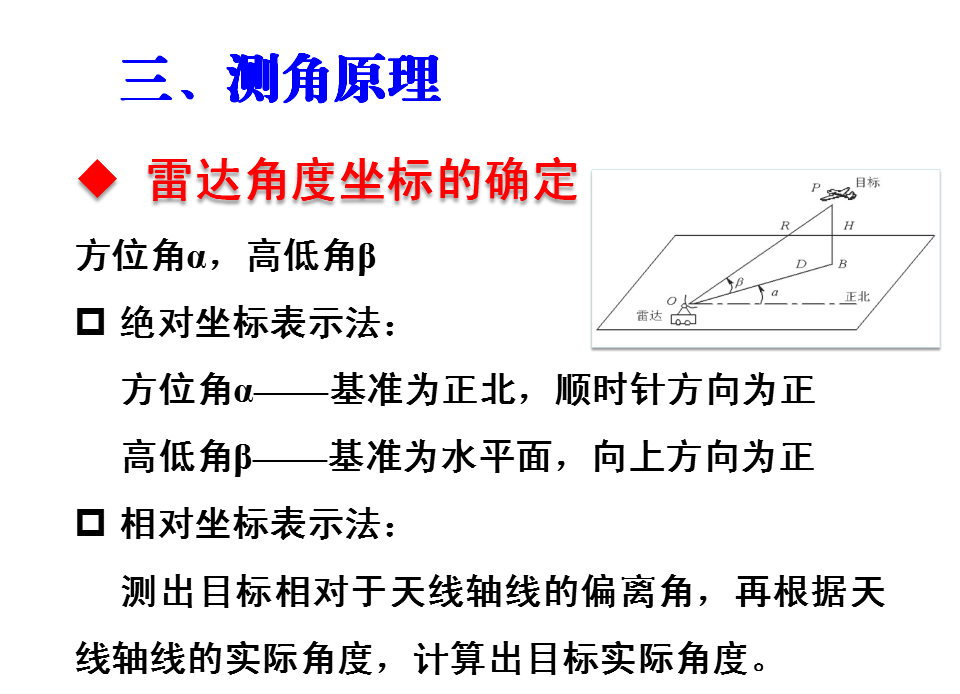
航天測控系統作為一種測量手段,直接輸出導彈、航天器的速度、距離、角度等參量,以提供航天器的精確軌道信息,為了獲得這些參量,不同體制的系統采用不同的方法。
重點學習航天外測中速度、距離和角度測量采用的方法與技術。
徑向速度簡單地定義為目標運動平行于接收機徑向的分量。它是目標運動沿接收機徑向的分量,既可以向著接收機,也可以離開接收機。需要記住的是:
①徑向速度總是小于或等于實際目標速度;
②測量的速度只是目標向著或離開接收機的運動;
③當目標運動垂直于接收機向或靜止時徑向速度為零。
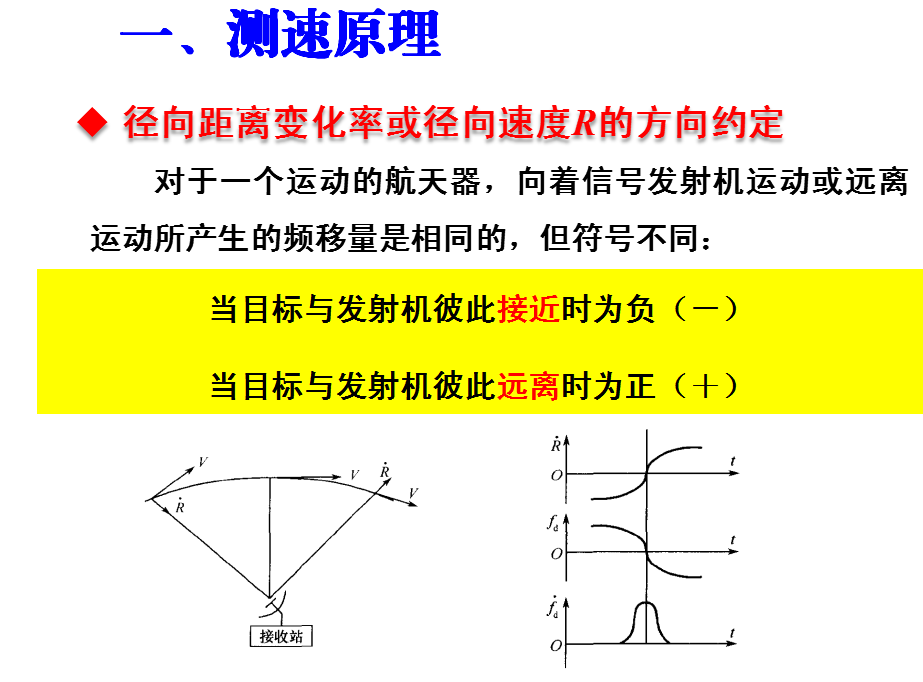
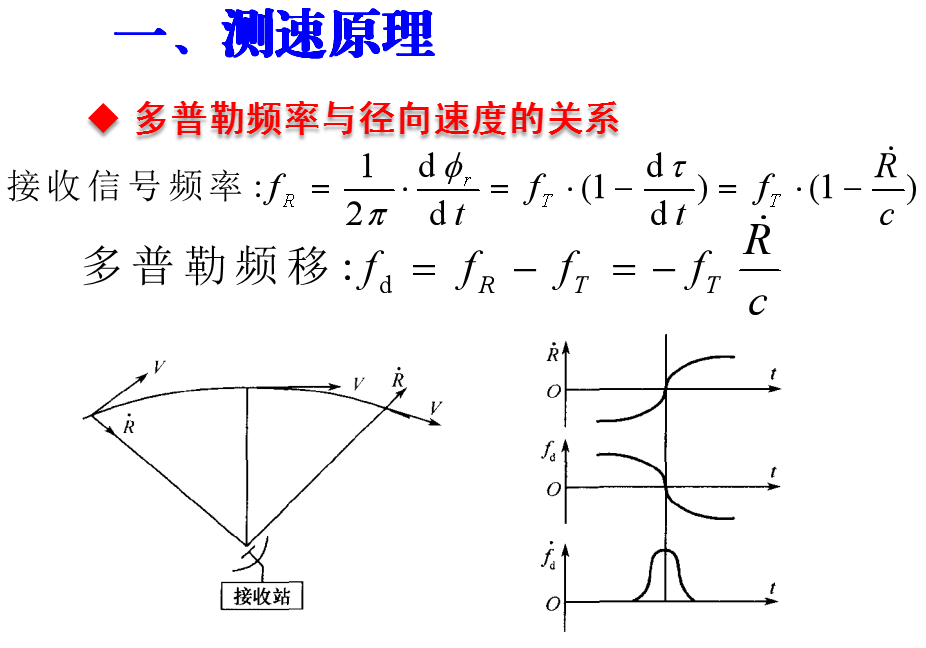
對于一個運動的航天器,向著信號發射機運動或遠離運動所產生的頻移量是相同的,但符號不同:
當目標與發射機彼此接近時為負(-)
當目標與發射機彼此遠離時為正(+)
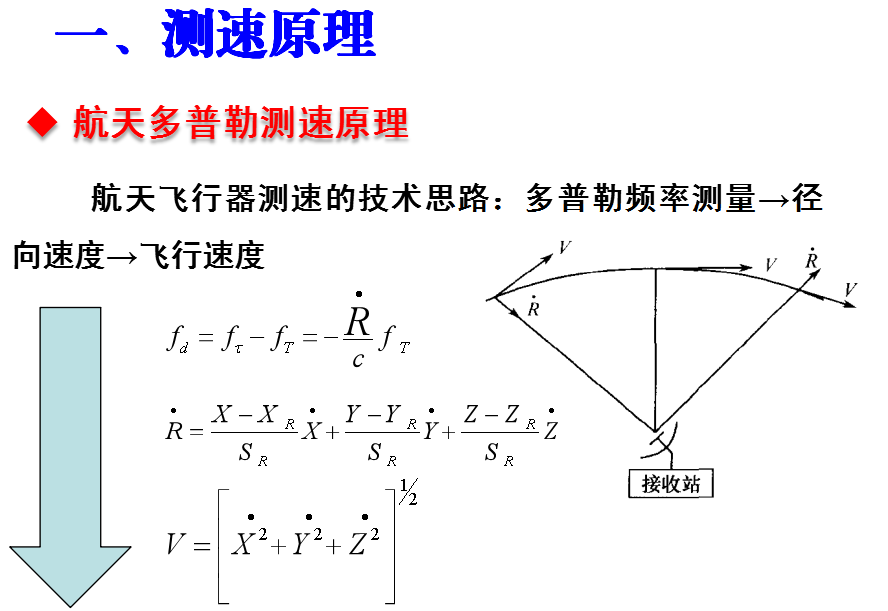
其中是X,Y,Z是飛行器坐標,XR,YR,ZR為接收收站坐標。SR是徑向距離。
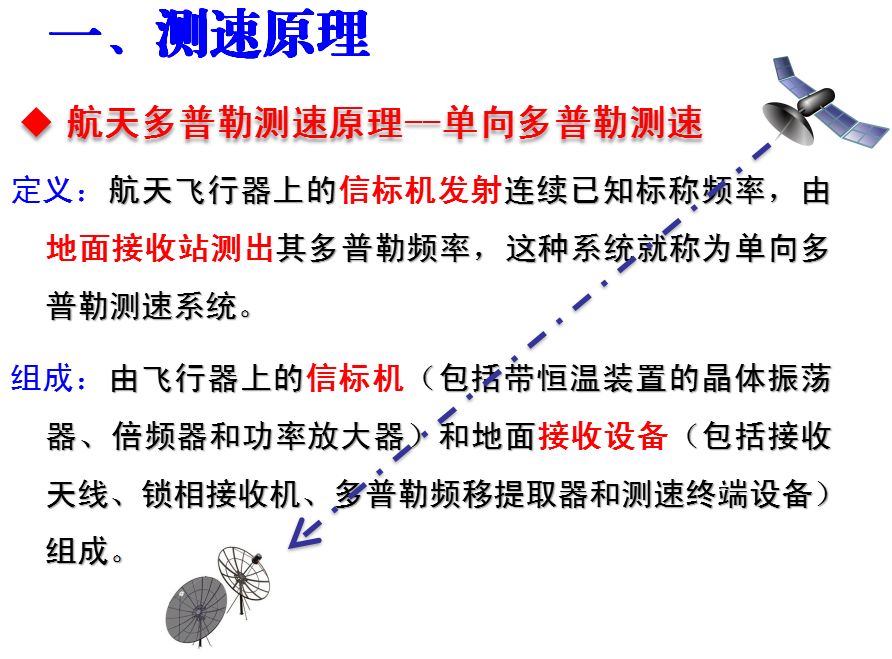
原理:信標機向地面發射無線電信號,由地面天線接收,直接測量飛行器到測控站間電波單程傳播的多普勒頻移,從而得到距離變化率,即徑向速度數據。為了在飛行器接近和飛離測控站過程中在終端設備不出現多普勒頻移的零值和負值現象,往往在實現多普勒頻移提取時,人為地加入一個大于最高多普勒頻移的偏置頻率,最后再從測量結果中減去這個頻率,得到真實的測速數據。這種系統的測量精度主要決定于飛行器上信標機的頻率穩定度。
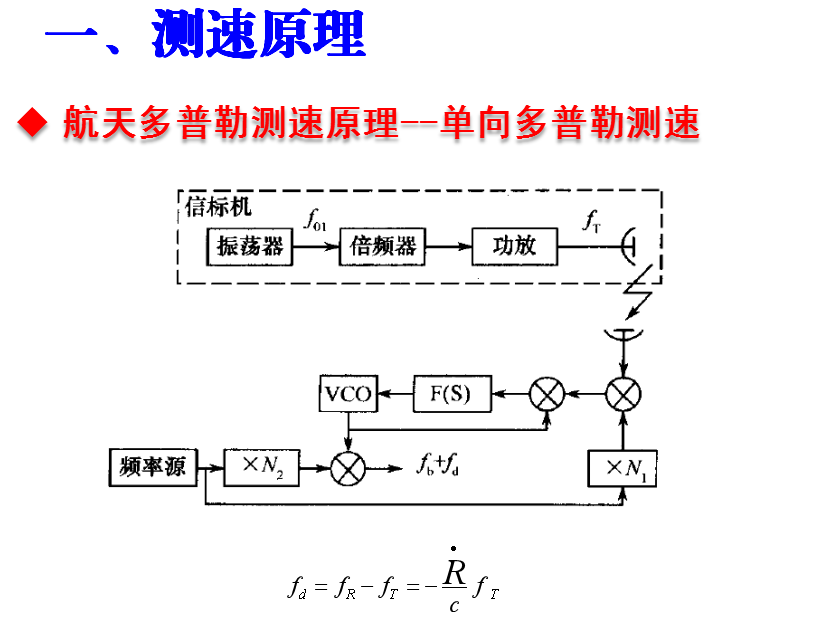
單向多普勒測速的精度直接受信標機頻率穩定度的影響,由于星載(彈載)條件的限制,制造頻率穩定度很高的信標機比較困難,這將直接影響多普勒測速精度,為了克服這個缺點,可以采用雙向多普勒測速系統。
在圖中的鎖相接收機輸出頻率是fb+fd 多普勒頻率,而fb是一偏置頻率,其作用一方面是提取多普勒頻率fd的正負號,確定飛行器與接收站相對運動的方向;另一方面是防飛行器飛越地面接收站上空時,幾接近為零,使頻率計測量不準。
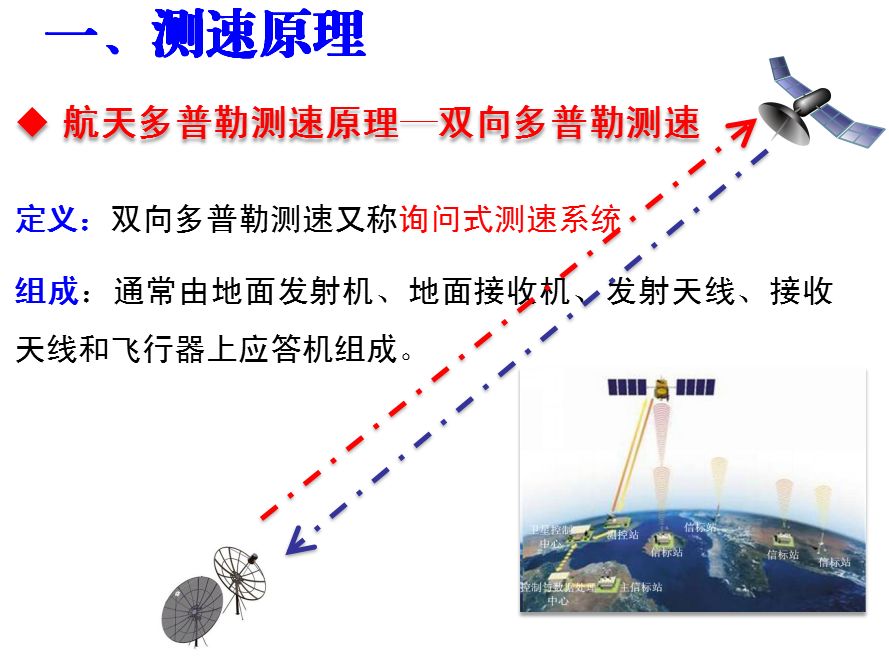
原理:將發射、接收設備置于同一測點上,發射機經天線向飛行器發送頻率高度穩定的信號,同時將這一信號送至地面接收機作為基準信號。這個信號經飛行器應答機轉發或飛行器反射返回到觀測點。由于航天器與測控站之間存在相對運動,地面接收設備接收到的返回信號的頻率就不同于發射信號的頻率,將返回信號與基準信號比較即可得出信號往返雙程的多普勒頻移(對應于飛行器到觀測點間距離變化率的兩倍),從而獲得飛行器的徑向速度。
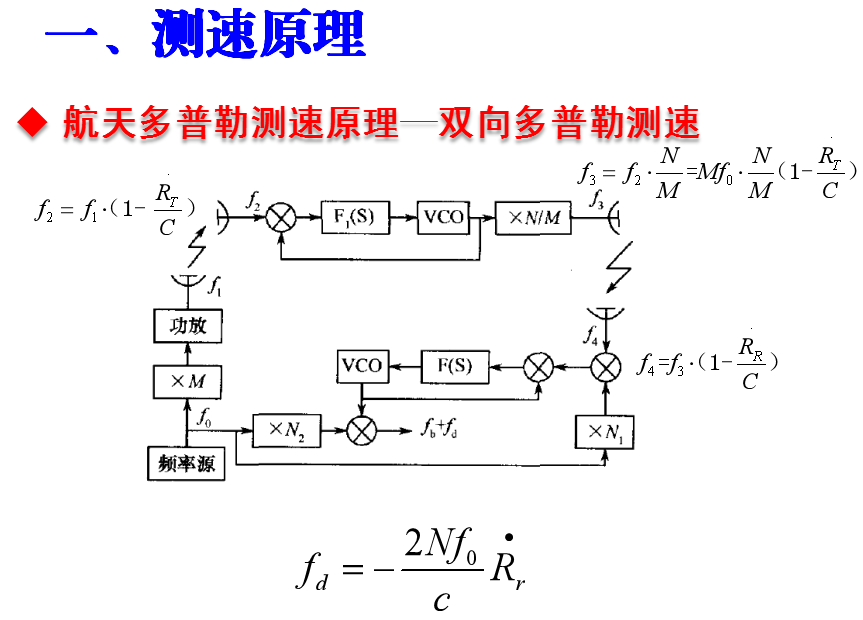
優點:這種系統的測速數據不受信號源頻率漂移的影響,地面頻標穩定度好,收發共用一個頻標,所以雙向測速系統的測速精度比單向測速系統的要高。
實現方法:這種系統通常采用多站體制,如以設置在不同位置上的多站接收設備同時接收飛行器轉發或反射的信號,可得到多個距離和變化率。兩個距離和變化率相減可得到距離差變化率。
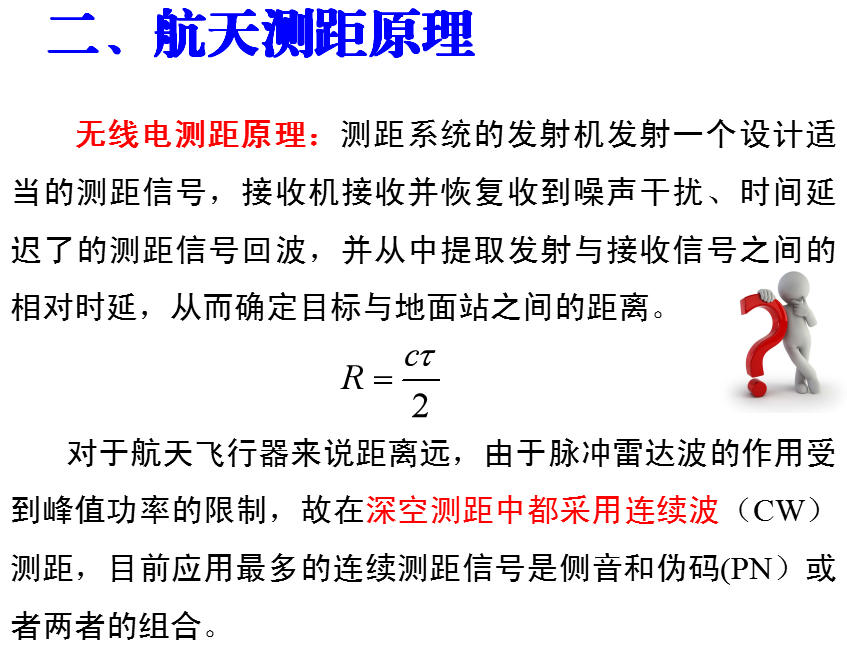
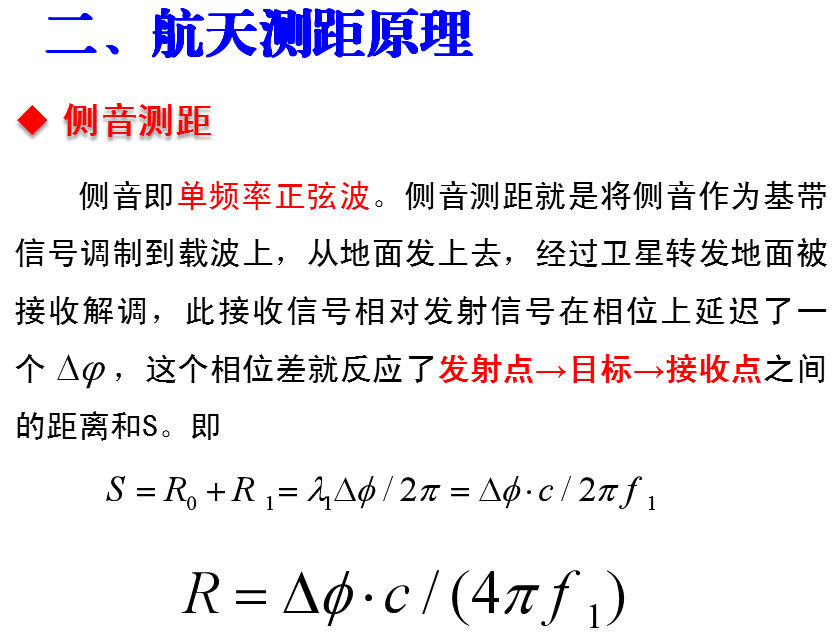
無線電測距是一種基于電磁波應用技術的測距方法。由于電磁波的傳播速度為光速,時間計量單位為納秒級,而我們的電子產品的響應時間單位為毫秒級,高精器件的響應速度為微秒級,所以,我們不可能直接測量出的電磁波的傳播時間,除非測量的距離較遠。
對于較近距的無線電測量,通常采用間接測量的方法來實現測量電磁波在空氣中的傳播時間,進而根據光速換算出物體之間的距離。
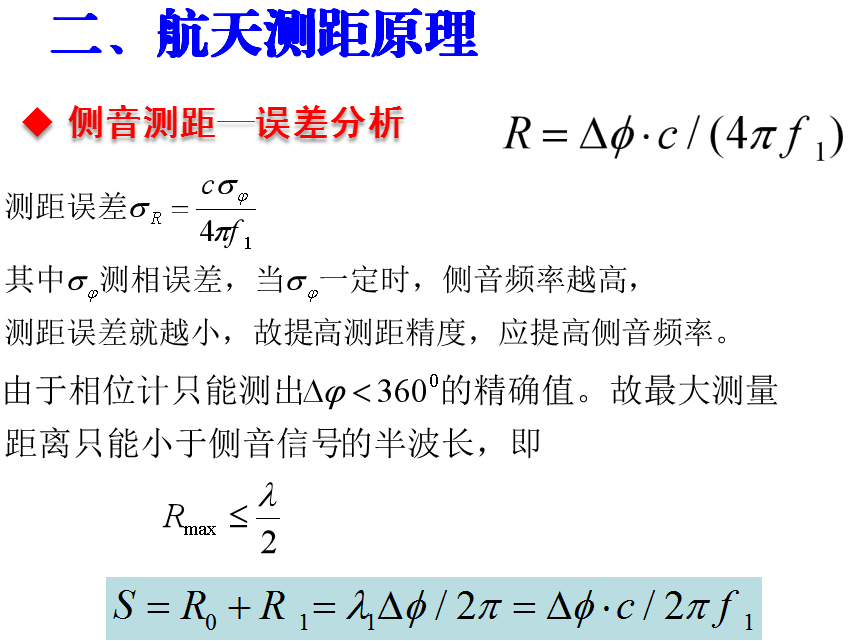
產生這么低的頻率是非常困難的,因此在深空測量時,一般不采用側音信號,而采用偽碼信號。
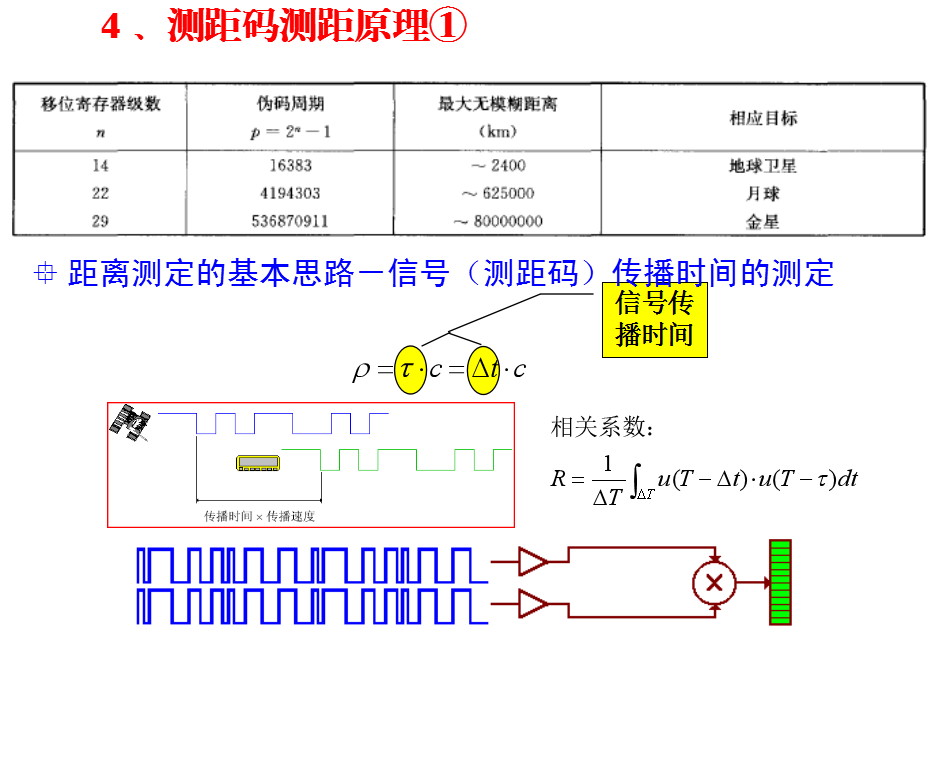
當用偽碼測距時,關鍵是測量接收碼(回碼)與本地碼之間的相對時延tao,因為距離R=C×tao/2。而tao的測量,是通過確定回碼和本地碼的相關函數峰值(即回碼時延或初相)位置來進行的。相關函數峰值位置可以通過相關試探的方法來確定,
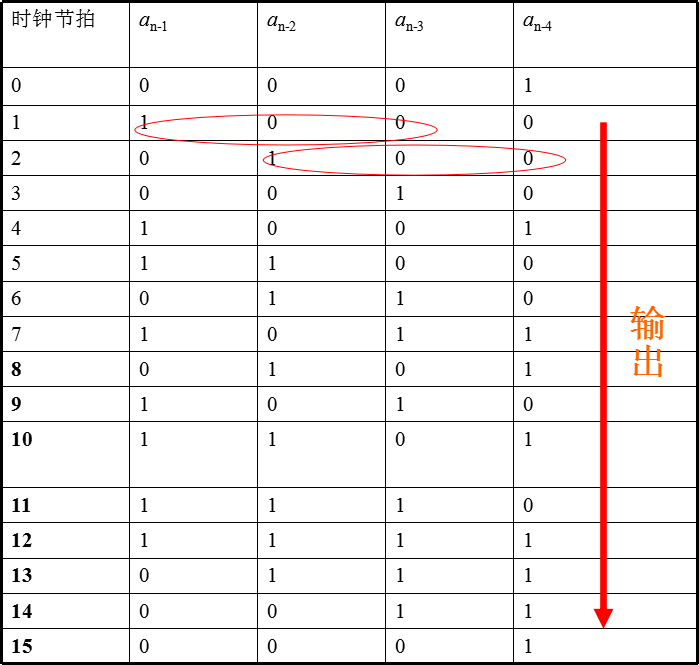
其具體步驟如卜:先任選某一個個初相(稱為試探初相)的本地碼,并求出它與回碼的相關函數,這是第一次試探。若相關函數處于低電平,即無峰值出現,則選擇下一個初相進行第二次試探,若相關函數仍未出現峰值,則繼續進行第三次試探、第四次試探……直至最后求得相關函數峰值為止。若測距碼的長度(周期)為P,則最多需要進行p次相關試探,才能最后確定回碼的正確時延。
將確定相關函數峰值位置的過程稱為“捕獲”,所需時間為“捕獲時間”。毫無疑問,從實時測量應用的角度來講,當然是希望捕獲時間越短越好,即要求快速捕獲。但當要測的目標跟離很遠時,為克服測距模糊所選用的偽碼長度必然很長。這樣,一方面進行一次相關試探所需的時間相應地很長,另一方面所必須進行相關試探的次數也很多。于是,所需捕獲時間就難以承受。
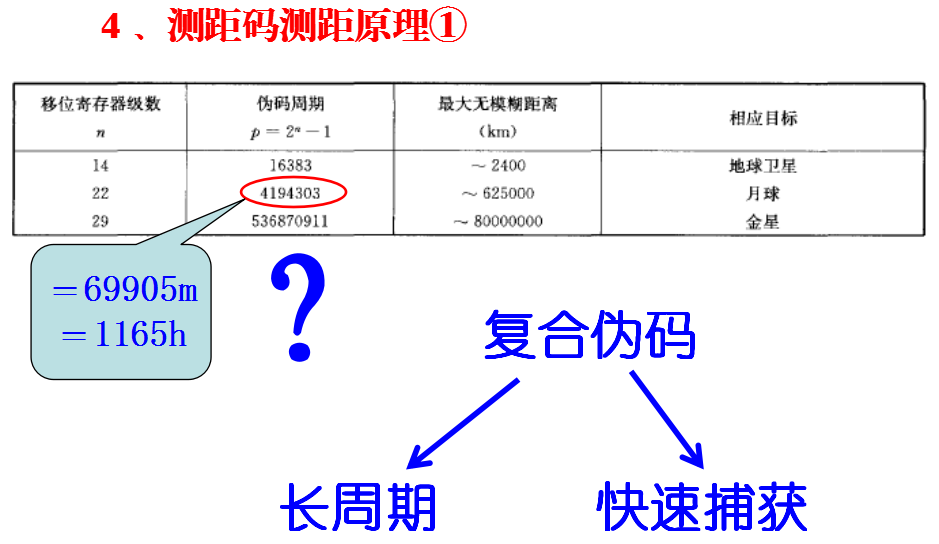
為了實現碼的快速捕獲,在碼的選擇中使用復合碼,所謂復合碼就是將幾個周期較短的偽隨機碼按照一定的邏輯運算組合成一個長周期的偽隨機碼。復合碼的周期為各個字碼周期的公倍數
單碼不適合快速捕獲,復合偽碼利用字碼特性實現快速捕獲。
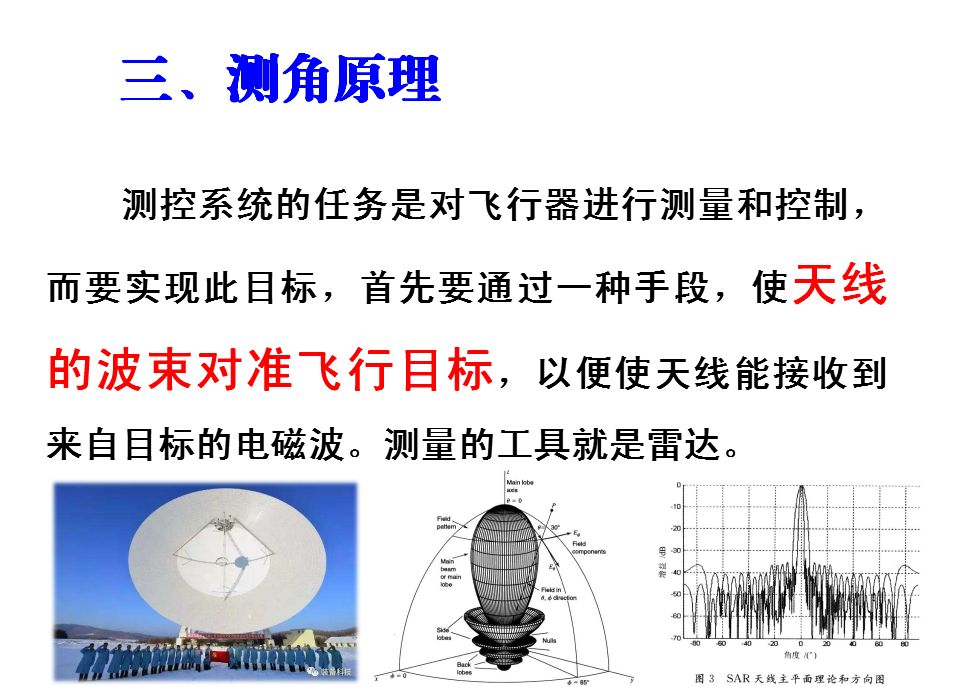
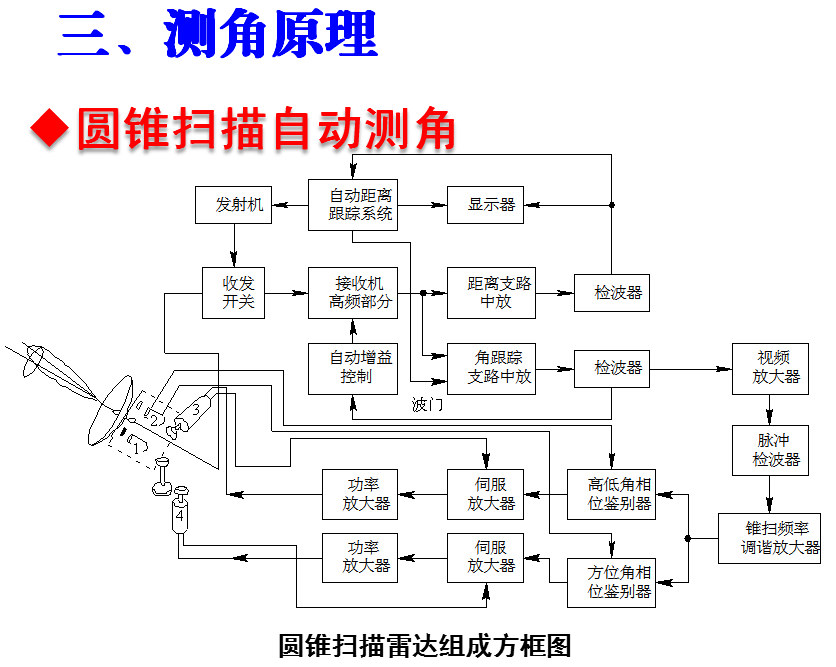
測控系統的任務是對飛行器進行測量和控制,而要實現此目標,首先要通過一種手段,使天線的波束對準飛行目標,以便使天線能感應到來自目標的電磁波。測試工具就是運用雷達。
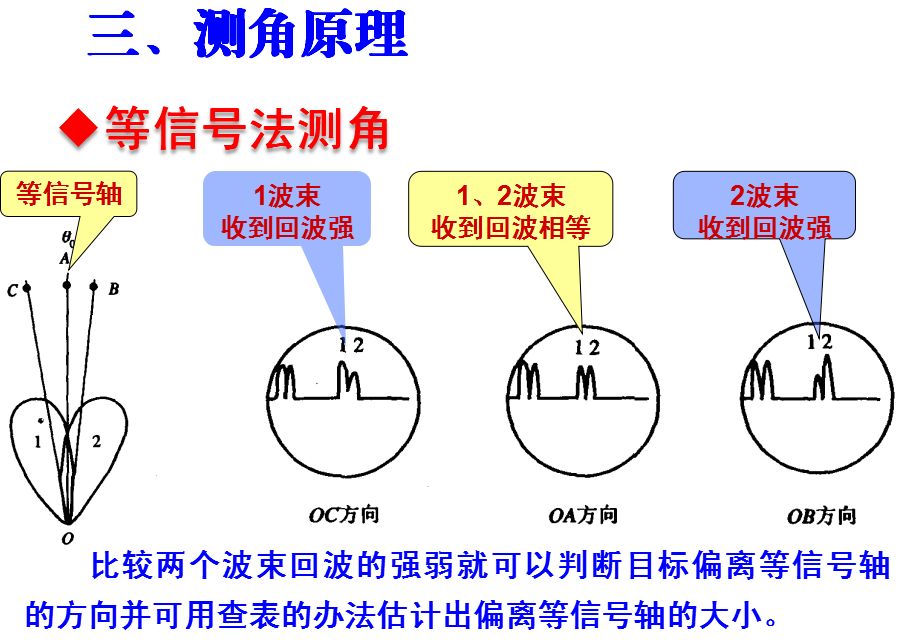
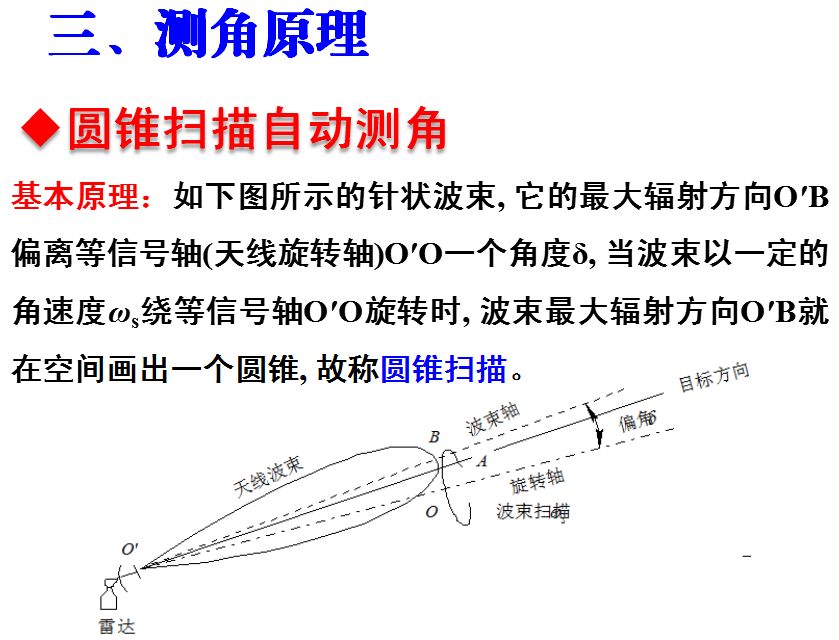
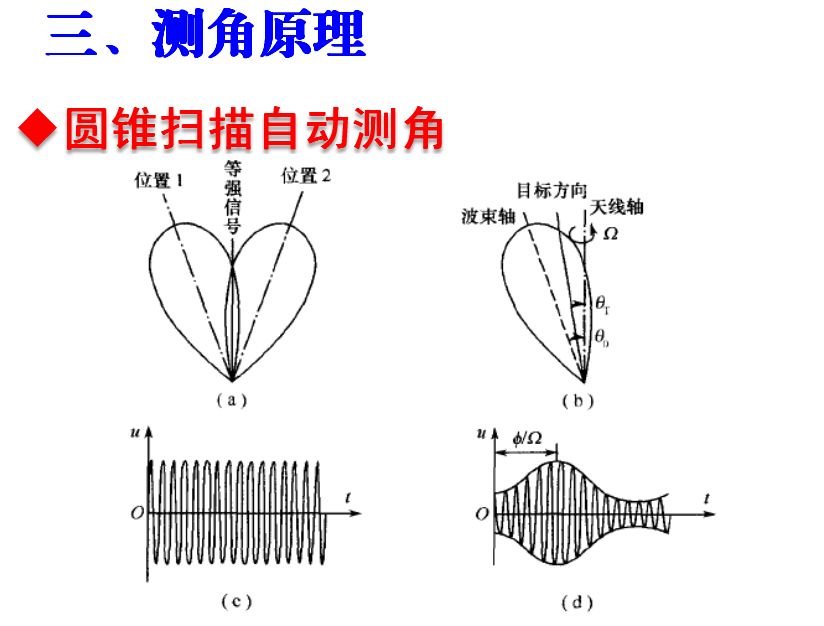
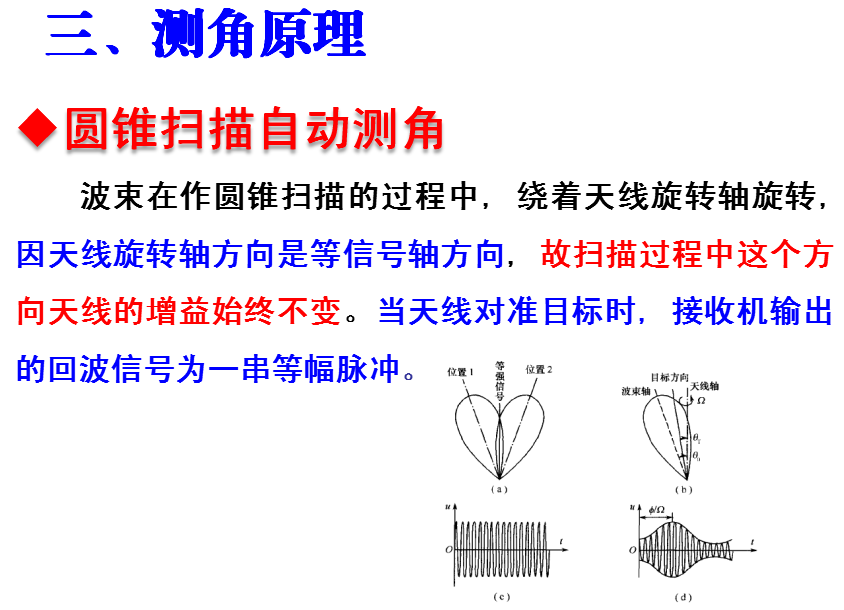
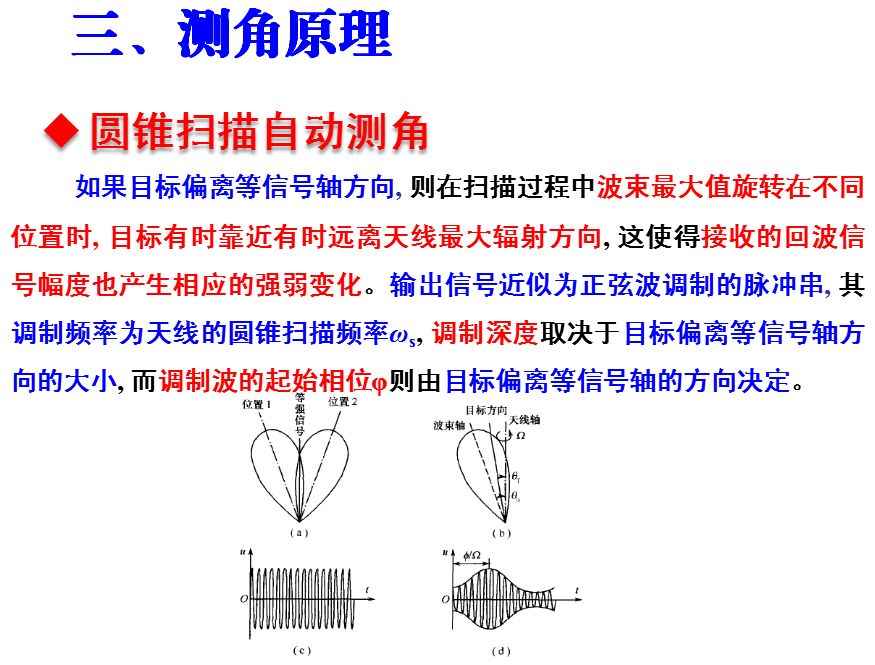
圓錐掃描雷達的天線為旋轉拋物面天線,天線波束軸(最大增益位)偏離天線軸一個Theta0。角度。波束掃描機構使波束按一定的角度頻率繞大線軸旋轉,這樣波束軸在空間畫出一個繞大線軸旋轉的圓錐面.故稱圓錐掃描,如圖所示。當目標處在天線軸方向時,由于波束旋轉時在該方向的增益不變,所接收信號場強不變,接收機輸出為等幅信號,如圖所示。故天線軸方向又稱為等強信號線。當目標偏離天線軸一個小的誤差角Br時,大線波束旋轉時在目標方向的增益隨之變化,這時接收信號場強亦隨之變化,接收機輸出信號包絡也隨之作相應變化。其振幅近似正弦調制,其調制幅度對應于誤差角的大小,而調制正弦信號的相位對應著口標偏離天線軸的方向,如圖示。接收機輸出的調幅信號包含著目標偏離大線軸的角誤差信息,從這個信號中可進一步提取出直接反映誤差角thetaT大小的誤差信號,并送至伺服控制電路,驅動天線軸對準目標,從而實現角跟蹤。
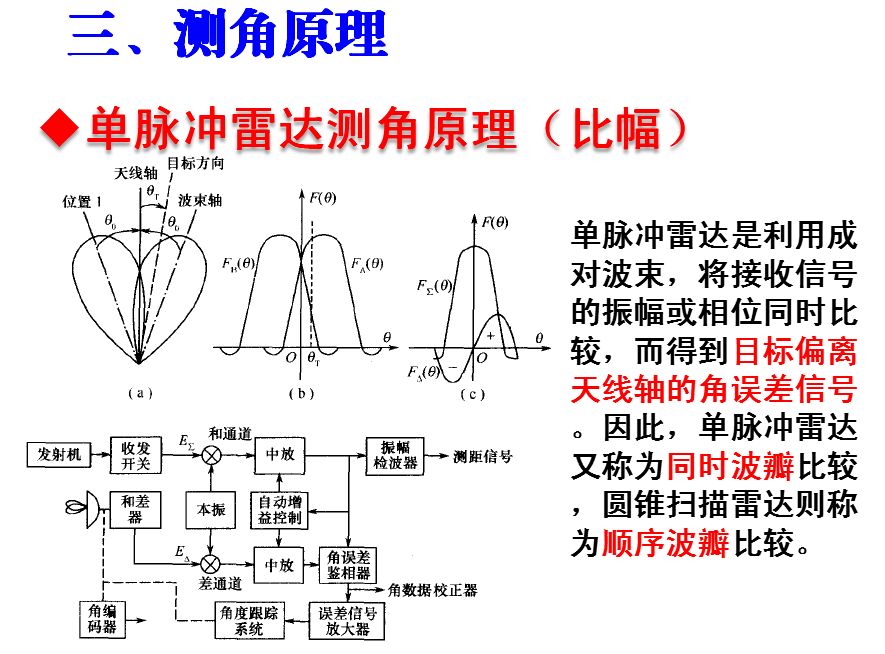
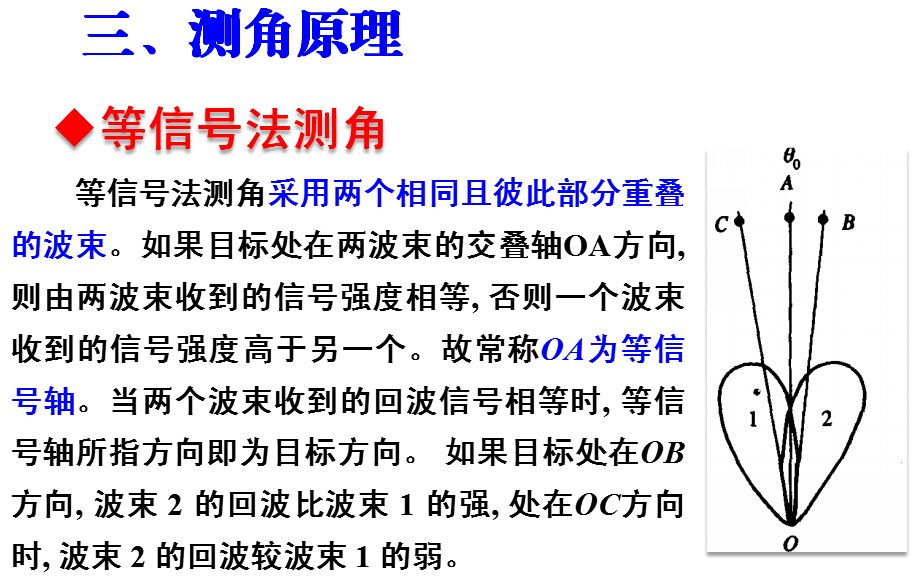
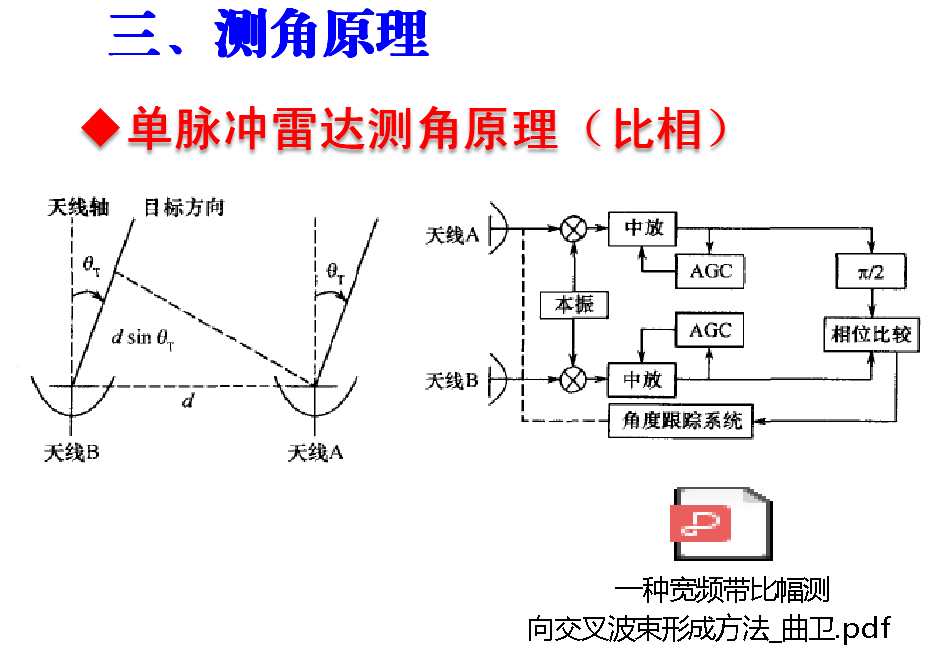
單脈沖雷達是利用成對波束,將接收信號的振幅或相位同時比較,而得到目標偏離天線軸的角誤差信號。因此,單脈沖雷達又稱為同時波瓣比較,圓錐掃描雷達則稱為順序波瓣比較。
“單脈沖”的含義是指這種雷達能從一個接收的脈沖信號中得到目標偏離天線軸的角誤差信號。單脈沖雷達的測角精度較高,故在測控系統中應用較多。下面介紹單脈沖雷達的測角原理,為簡化起見,只討論口標在一個平面內的測角原理,至雙平面的測角,其原理與單平面類似,故不再介紹。
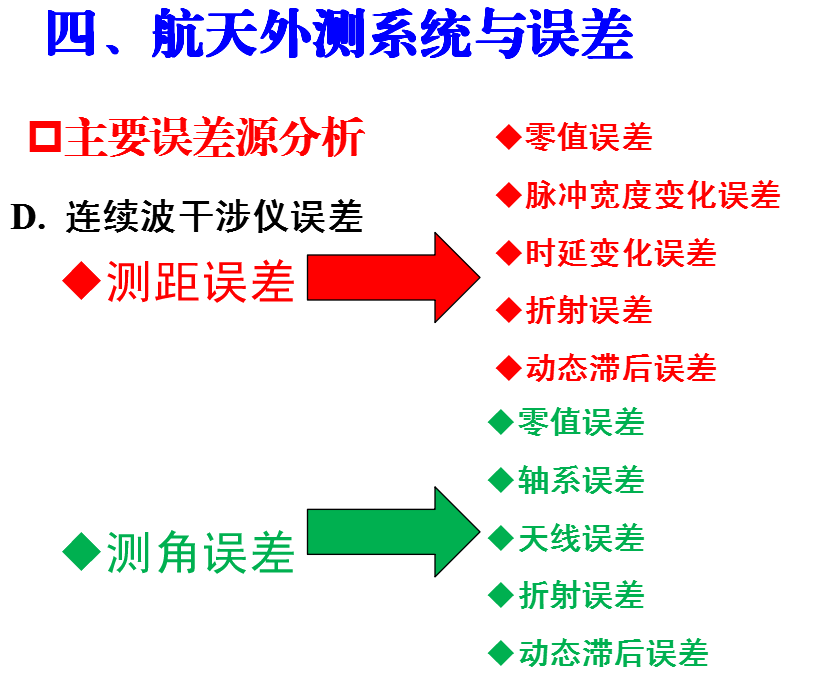
連續波干涉儀測量系統屬于典型的基線體制測量系統,測量精度高,常用作導彈和運載火箭主動段導彈測量的主干設備。
帶有激光測距的經緯儀、脈沖雷達、微波統一測控系統都是測距測角體制。由于測角精度有限,對遠距離目標定位精度較差,一般屬于中、低精度的外測設備。
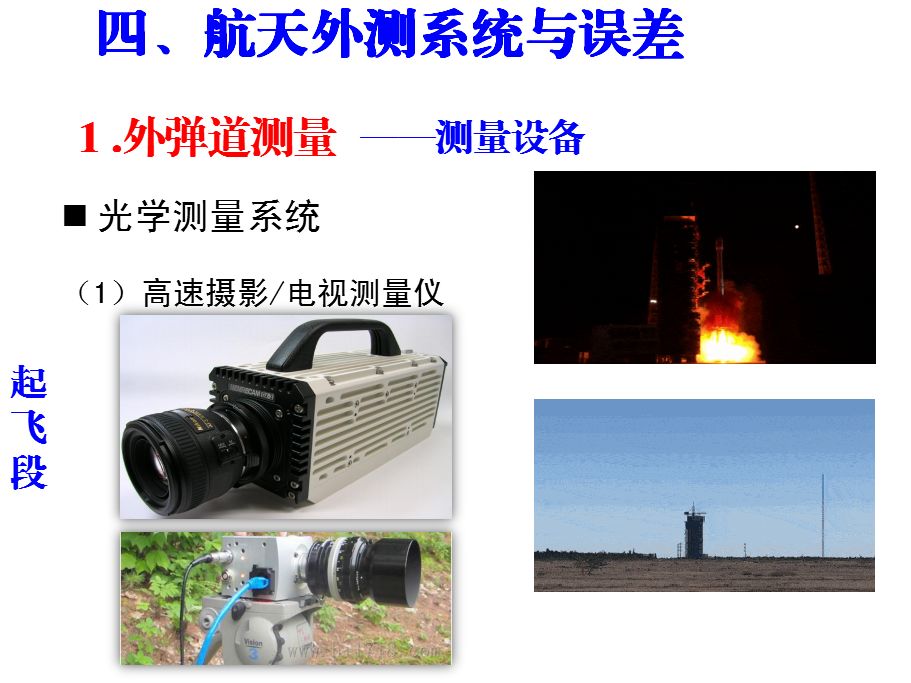
高速攝影儀是記錄、測量高速運動目標的重要設備,它把所需要的內容用較高的攝影頗率逐幅地拍攝到電影膠片上,經過顯影、定影、神洗后,膠片上每個畫幅就是連續高速運動目標以時間次序恃列的瞬時影像和瞬時空間位置。高速攝影儀由通用跟蹤架、同步高速攝影機、電控系統、控制系統等四部分組成。通過事后判讀,進行數據處理求得導彈(火箭)初始段嫖移量、飛行姿態和彈道參數。
光電經緯儀,基于光學經緯儀的電氣化,實現了被測目標的圖像、測量時刻的方位角和俯仰角的同步實時記錄。
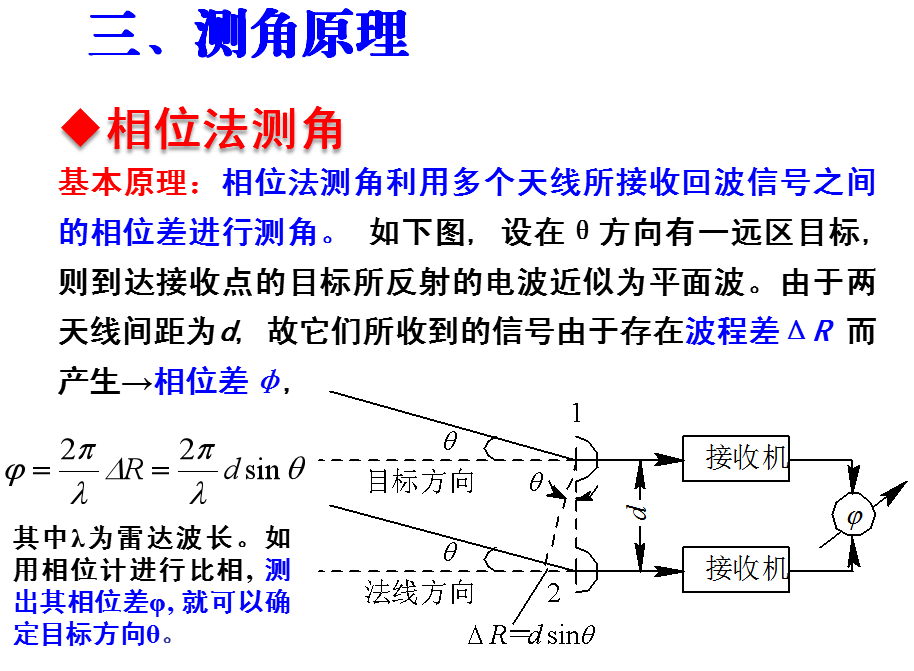
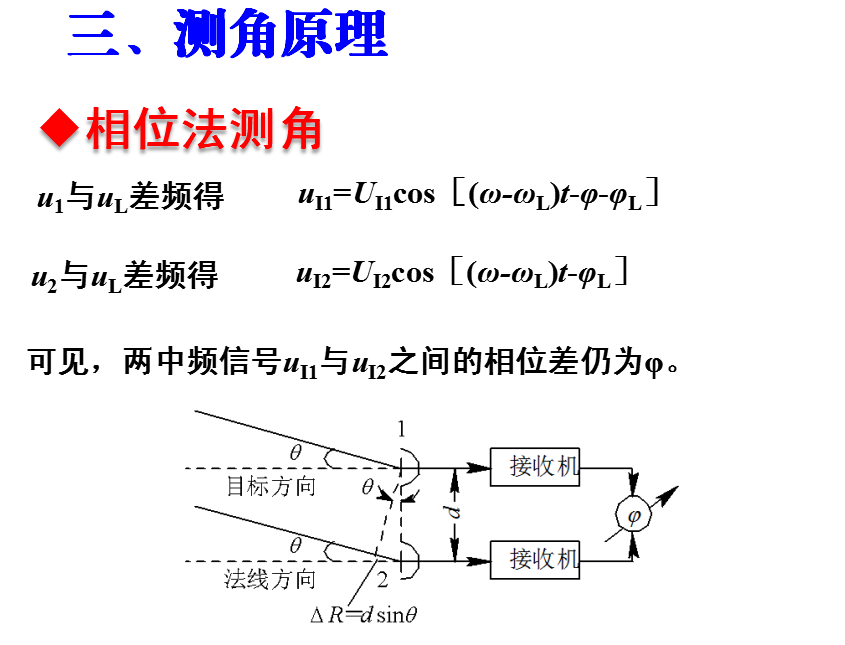
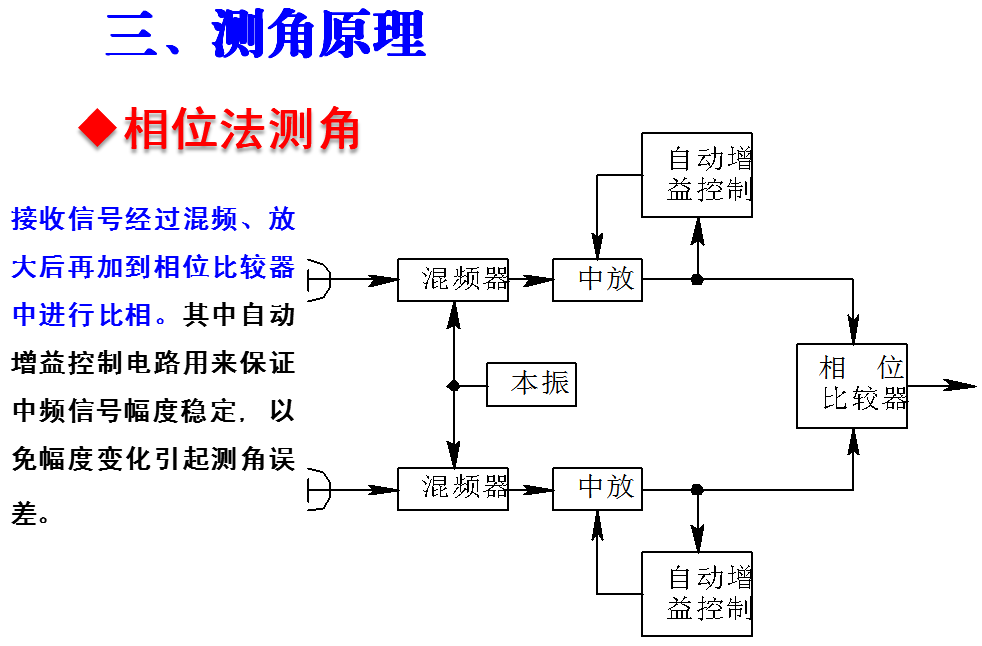
無線電干涉儀系統(radio interferometer system)是指利用相位比較技術測量飛行器運動軌跡參數的無線電測量系統。由相距一定距離的兩個地面接收天線,組成長度為nλ(n一般是整數,λ是無線電信號的波長)的基線,接收來自同一目標的無線電信號,并測出這個信號到達兩個天線的相位差或時間差,由相位差或時間差可以算出目標方向與基線之間的夾角或這個夾角的余弦(稱為方向余弦)。方向余弦與輻射源至每一天線的路徑長度之差成比例,所以這種系統實質上是距離差測量系統。兩個天線接收由輻射源發出并有測距信號調制的載波信號,比較測距信號的相位即可得到距離差數據。測量兩天線接收載波信號的多普勒頻移之差,可獲得距離差變化率,從而得到速度數據。
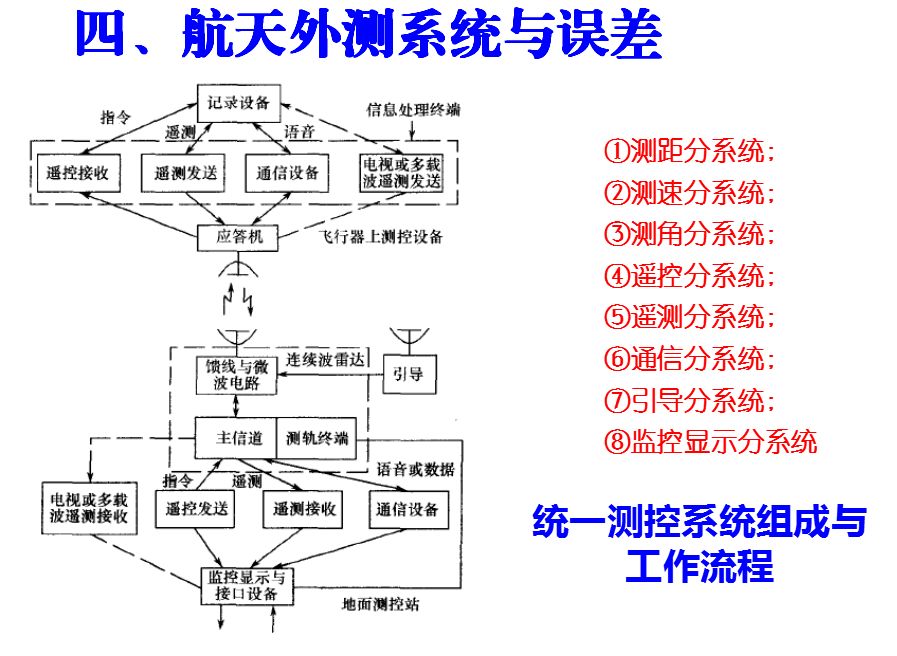
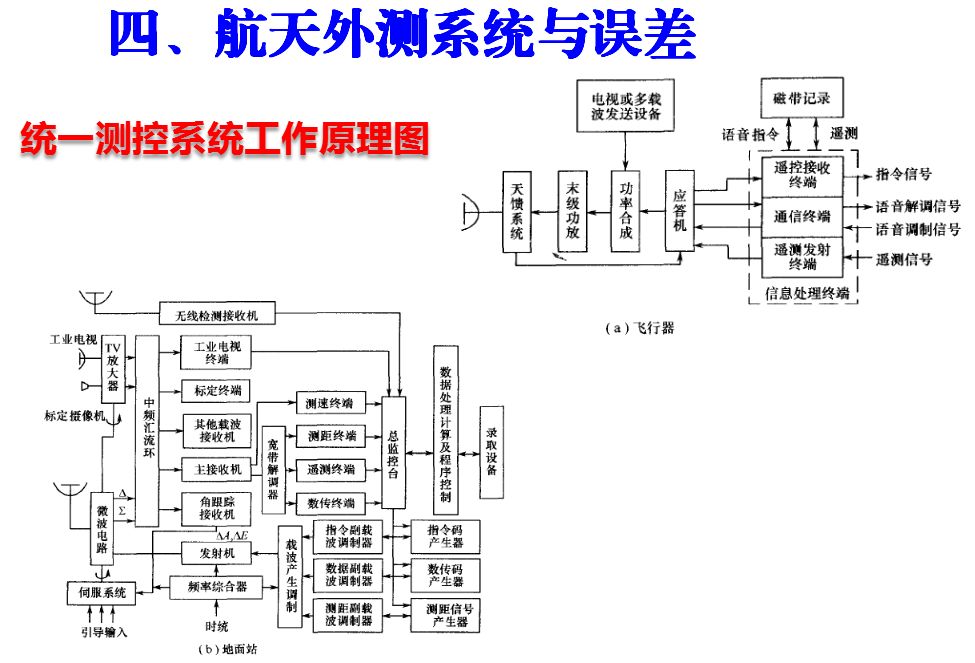
微波統一測控系統按其功能劃分,其基本組成如下:①測距分系統;②測速分系統;③測角分系統;④遙控分系統;⑤遙測分系統;⑥通信分系統;⑦引導分系統;⑧監控顯示分系統。圖是統一測控系統的組成及其作流程圖。統一測控系統的設備可分成兩大部分:飛行器上測控設備和地面測控站設備。圖中地面測控站中的點劃線方框部分相當于一部連續波雷達(其中包括主信道、測跟和測速等),它用來完成測軌功能(即測即 ,測速、測角等)。遙控發送設備主要山指令編碼器、遙控副載波調制器等組成,經遙控信號調制的遙控副載波送至系統主信道的發射機調制器對載波進行調制遙測接收設備。包括遙測副載波解調器、分路器、顯示器、記錄器等。其作用是完成對遙測副載波的解調、分路及信號的顯示與記錄。通信設備主要包括語音或數傳信號的副載波解訓及有關的終端設備監控、顯示是地面測控站指揮、控制及設備功能檢查、顯不的中心。引導設備則與一般的連續波雷達相類似。測控站與計算機或其他外界設備的連接可通過接口設備來完成。
外彈道跟蹤測量設備一般不能直接測得外彈道參數,而是利用相應的測量元素,經過一系列數據處理工作得到。
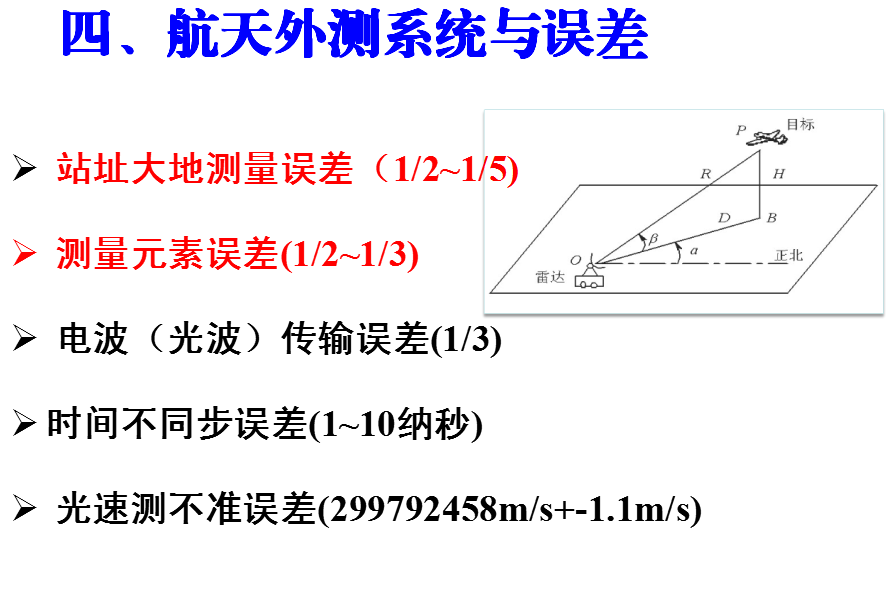
1.站址大地測量誤差
測量設備輸出的測量元素以設備的各自測量坐標系為參考,由這些測量元素綜合處理得到彈道參數時,必須將其轉換到統一的參考系內(數據處理結果一般規定發射系為統→的參考系)。顯然,由測量坐標系向發射坐標系轉換時,坐標圓點的位置測量誤差和坐標轉換誤差將影響外彈道測量精度。在高精度測量系統中的站址點位的測量精度要求為百萬分之一。第一代武器試驗提出的測量點位大地勘測精度為1x 10-7 r時,高程為2m 。第2代武器試驗要求測量站的站址相對于發射點的測量精度更高。目前已廣泛利用GPS 進仔大地測量,這精度要求則很容易滿足,能使站址大地測量誤差的影響降至彈道總誤差的1/5 以下。
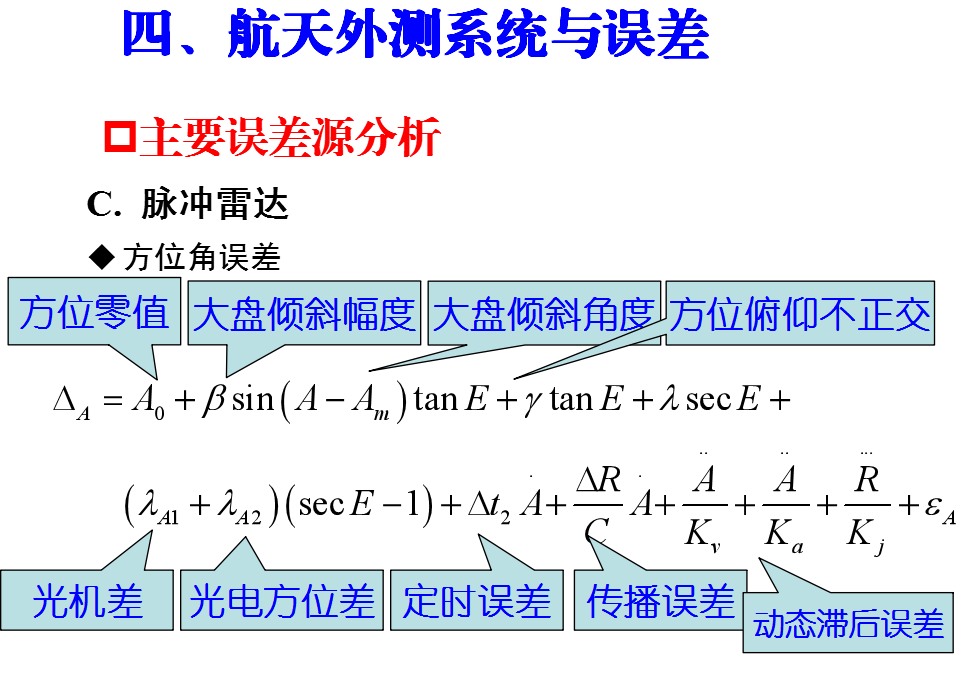
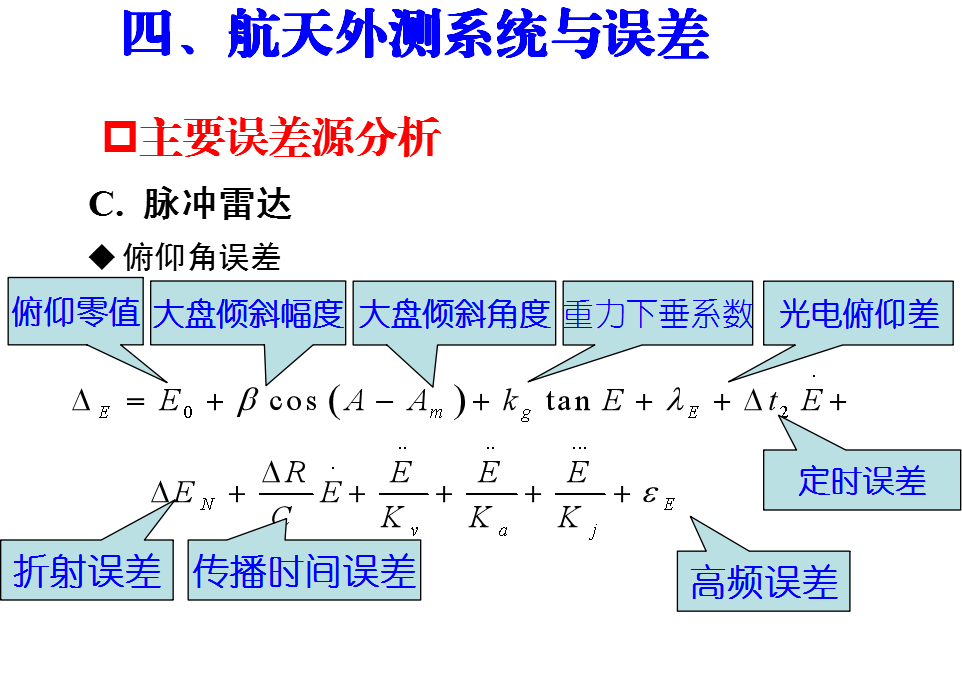
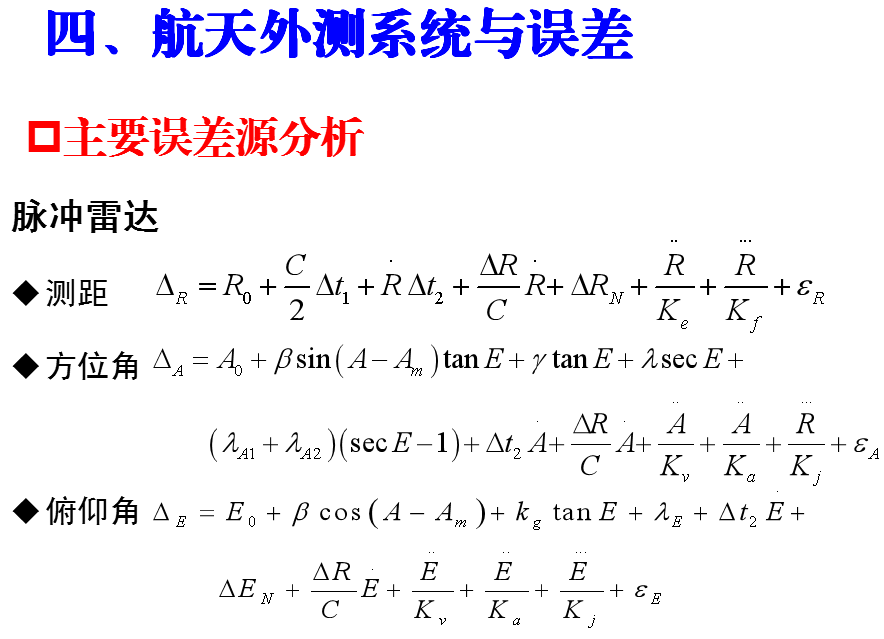
2. 測量元素誤差
任何測量設備的測量元素都有誤差,外彈道測量的主要誤差源(大約占彈道總誤差的1/3 以上)與測量元素的誤差和測量設備的體制、重要源器件的性能、濾波技術、外界干擾、校正方法等因素有關,標準頻率源的不穩定、零值校正殘差、導彈飛行的高動態變化、熱噪聲的影響都會引起測量誤差。盡管從設備設計、研制、安裝、調整直到操作使用等各環節都盡量減少誤差,但受技術水平的限制,測量元素誤差仍相當大,在某些高精度外彈道測量系統中,測量元素造成的外彈道誤差甚至占彈道總誤差的1/2 以上,且無有效方法扣除干凈。外測數據處理的主要處理流程之→就是修正和減小各種測量誤差以獲取滿足測量精度要求的彈道參數。
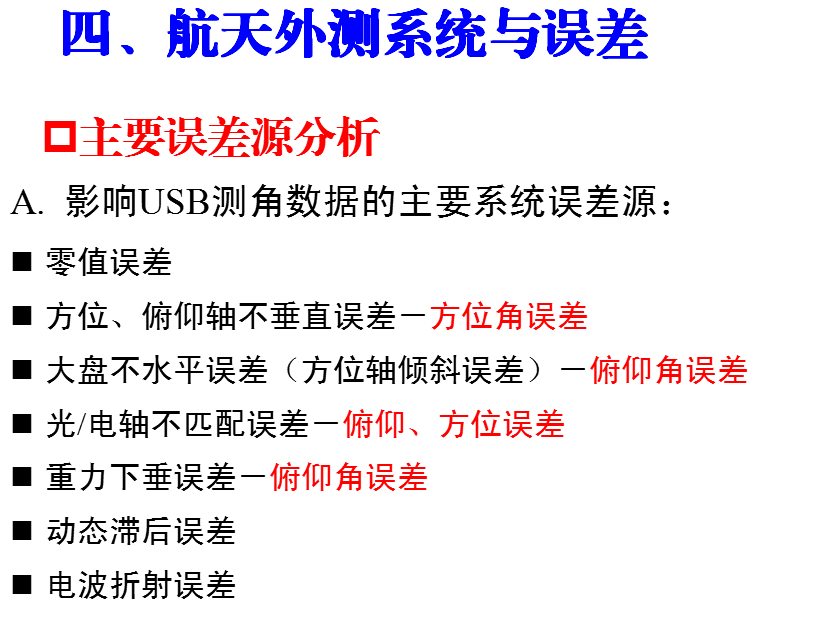
零值誤差:測得值為零時的基值測量誤差
光軸:安裝在天線上作為軸系基準的望遠鏡或者其他光學設備的視準軸
天線電軸:對于跟蹤雷達,當目標處于天線波束某一個角度時的角誤差信號為零的方向(單脈沖雷達天線中是指差波束零點所指的方向)
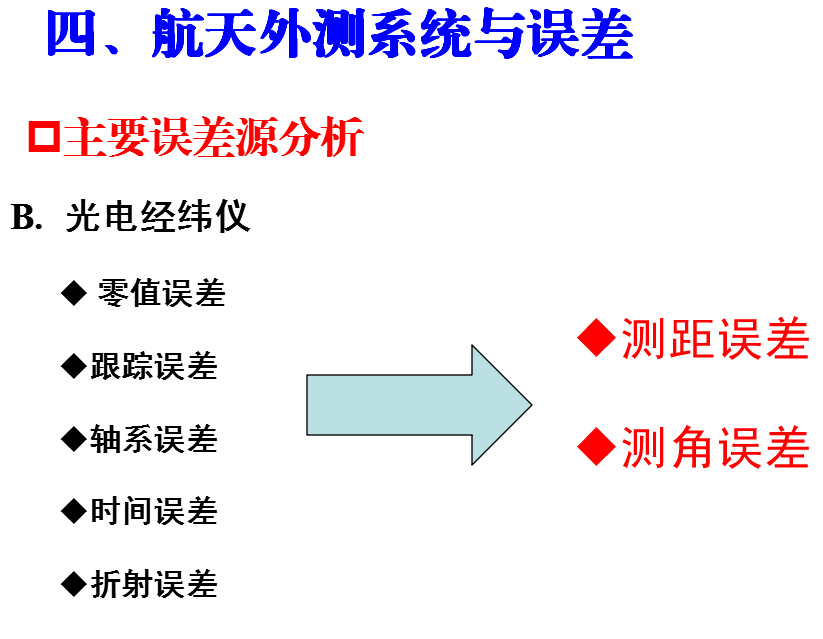
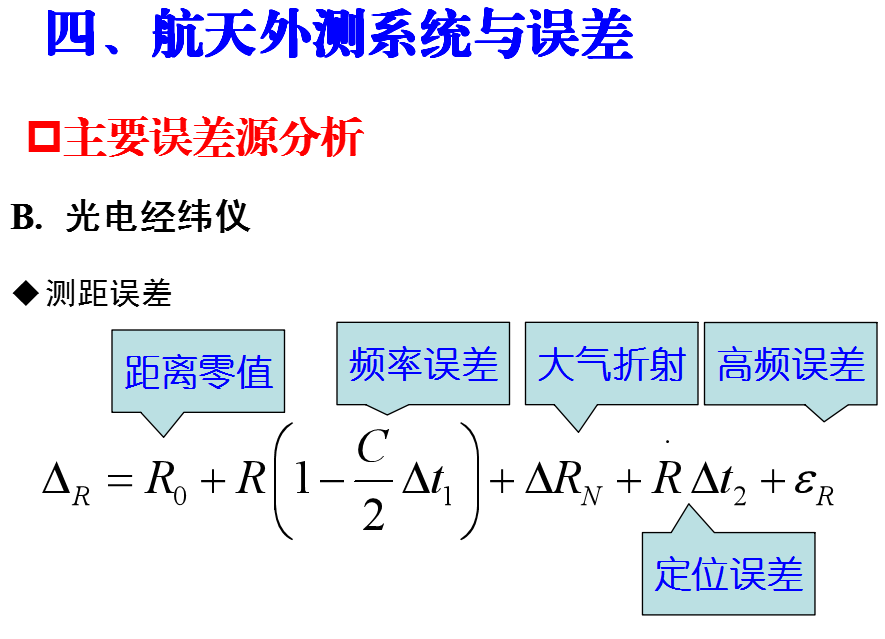
測量元素誤差
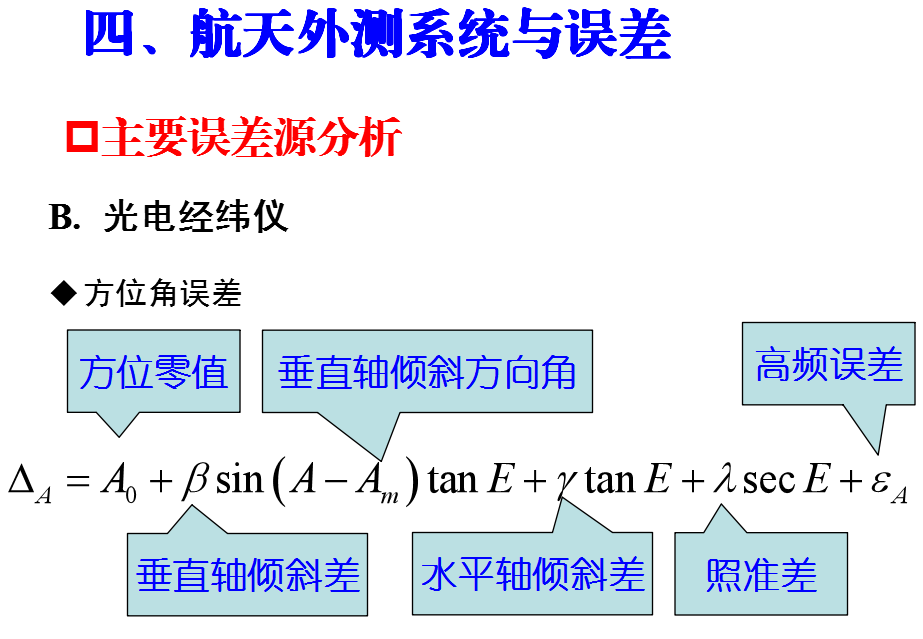
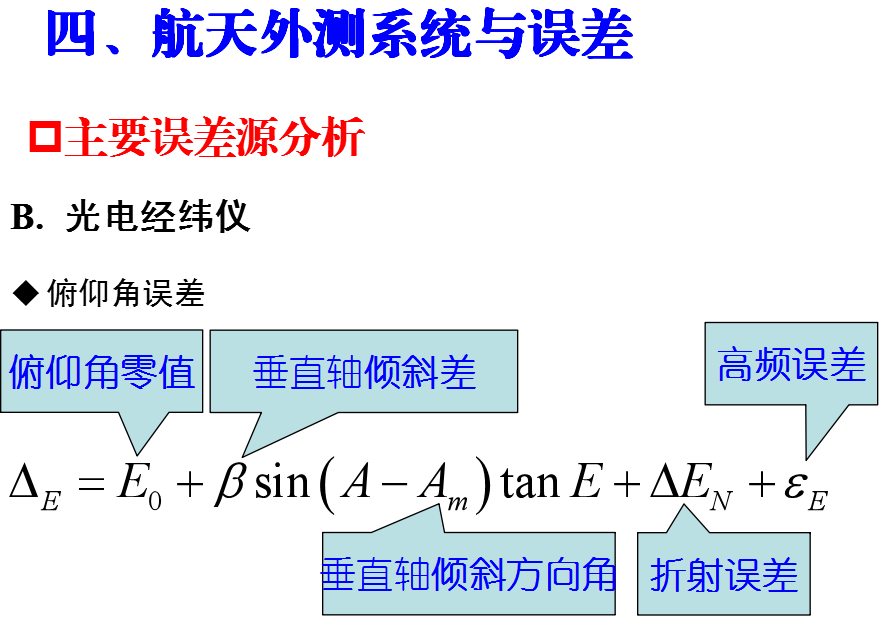
零值誤差:儀器在定向時由于操作手視覺差和儀器本身誤差,觀點經緯儀的水平盤零刻度線沒有真正對準大地北從而產生了方位誤差,高低盤盤零度沒有對準零角度,產生了俯仰誤差。
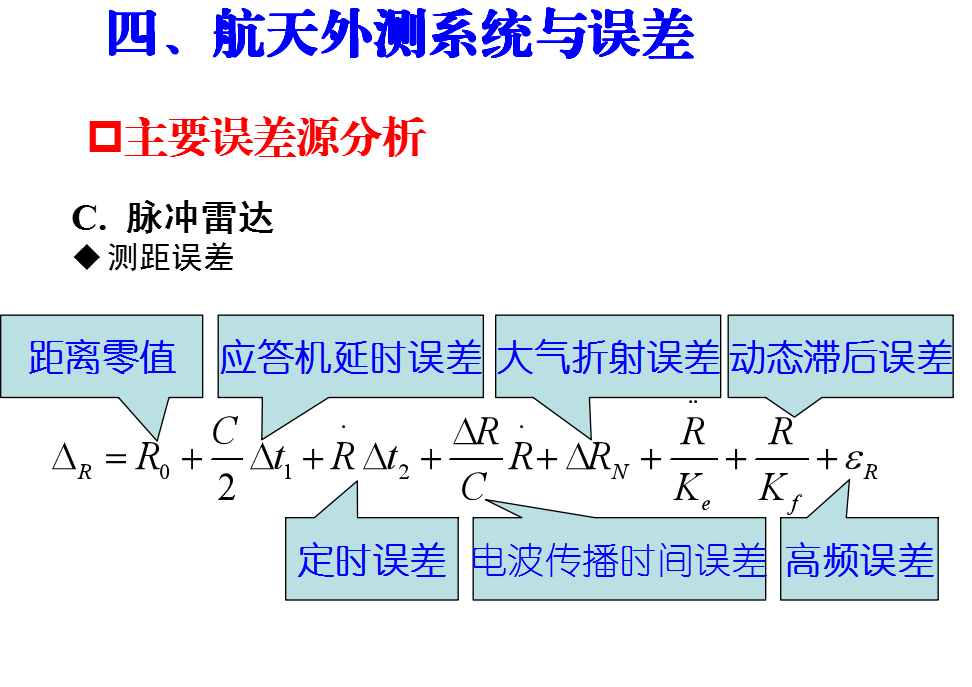
頻率誤差:由于計數器頻率和真空光速不符產生的和距離有關的系統誤差。
大氣折射誤差:兩部分組成:一部分由于大氣阻礙了光波的傳播,使光波速度延緩,另一部分是光波傳輸路徑彎曲造成的。
定時誤差:由于激光測距儀與光電經緯儀所測的目標不是同一時刻的測量值引起的。
軸系誤差:經緯儀垂直軸、照準軸和水平軸相互垂直。
照準軸:儀器水平時方位零刻線對準大地北的測站坐標系X軸
垂直軸與鉛垂線線重合,測站坐標Y軸,
水平軸基測站坐標系Z軸。
由于三軸不相互垂直帶來的誤差稱之為軸系傾斜差,還有垂直傾斜差、水平傾斜差、照準差
高頻誤差:誤差正負符號與數值的變化頻率較高的誤差,如白噪聲隨即誤差。
光軸和電軸不平行度稱為光電偏差。
光軸與機械軸的夾角(銳角)。
光機偏差只引起方位角誤差。機械軸是看不見、摸不著的,其指向只能通過特定的數學方法來獲取。光機偏差通過反向法來標定,通過調整光軸的指向來調整其大小。
審核編輯 :李倩
-
測量系統
+關注
關注
2文章
555瀏覽量
42097 -
光學
+關注
關注
4文章
785瀏覽量
36996
原文標題:航天外測系統概念與組成
文章出處:【微信號:ZGDZGCS,微信公眾號:電子萬花筒】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄






 工商網監
工商網監
評論