") 一套基于擴(kuò)展卡爾曼濾波的GNSS/INS組合導(dǎo)航系統(tǒng)算法代碼
一套基于擴(kuò)展卡爾曼濾波的GNSS/INS組合導(dǎo)航系統(tǒng)算法代碼
雖然GNSS/INS松組合算法已經(jīng)很成熟,但對(duì)初學(xué)者來(lái)說(shuō)正確實(shí)現(xiàn)它仍是不小的挑戰(zhàn)。為此,我們開源一套基于擴(kuò)展卡爾曼濾波的GNSS/INS組合導(dǎo)航算法代碼(KF-GINS)。代碼結(jié)合團(tuán)隊(duì)已公開的視頻課程、講義,供初學(xué)者入門使用,也可作為基礎(chǔ)的GNSS/INS松組合算法研究平臺(tái)。
隨著自動(dòng)駕駛和智能無(wú)人系統(tǒng)的發(fā)展,復(fù)雜環(huán)境下連續(xù)準(zhǔn)確的定位定姿需求日益增加。在眾多的導(dǎo)航定位技術(shù)中,全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)和慣性導(dǎo)航系統(tǒng)(INS)具有天然的互補(bǔ)性,因此GNSS/INS組合導(dǎo)航被公認(rèn)為最經(jīng)典、使用最廣泛的組合導(dǎo)航系統(tǒng)。
GNSS/INS的數(shù)據(jù)融合算法首先通過(guò)INS機(jī)械編排實(shí)現(xiàn)導(dǎo)航狀態(tài)的推算,然后通過(guò)Kalman濾波將GNSS的定位和測(cè)速信息作為觀測(cè)量對(duì)INS推算的導(dǎo)航狀態(tài)量進(jìn)行修正。GNSS/INS數(shù)據(jù)融合的Kalman濾波算法已經(jīng)很成熟,但涉及慣性導(dǎo)航算法、IMU誤差建模、Kalman濾波設(shè)計(jì)實(shí)現(xiàn)等多方面的知識(shí),正確實(shí)現(xiàn)組合導(dǎo)航算法對(duì)初學(xué)者來(lái)說(shuō)仍是不小的挑戰(zhàn)。
武漢大學(xué)i2Nav團(tuán)隊(duì)開源了一套基于擴(kuò)展卡爾曼濾波的GNSS/INS組合導(dǎo)航系統(tǒng)(EKF-Based GNSS/INSIntegrated Navigation System, KF-GINS)算法代碼。這套代碼結(jié)合團(tuán)隊(duì)已公開的視頻課程、講義[1,2],供初學(xué)者入門使用,也可作為基礎(chǔ)的GNSS/INS松組合算法研究平臺(tái)。KF-GINS采用C++語(yǔ)言編寫,各功能函數(shù)和模塊相對(duì)獨(dú)立,復(fù)用性和可擴(kuò)展性較強(qiáng)。KF-GINS已上傳到GitHub,可通過(guò)以下鏈接獲取:
KF-GINS主要特點(diǎn)包括:
擴(kuò)展卡爾曼濾波(誤差狀態(tài)向量)架構(gòu)的GNSS/INS松組合算法,包括IMU誤差補(bǔ)償、慣性導(dǎo)航解算、Kalman濾波、誤差反饋等環(huán)節(jié);
采用21維系統(tǒng)誤差狀態(tài),包括位置誤差、速度誤差、姿態(tài)誤差、IMU零偏誤差和IMU比例因子誤差;
姿態(tài)誤差采用Phi角模型,速度、位置誤差定義在導(dǎo)航坐標(biāo)系下;
慣性導(dǎo)航解算采用基于角速度和加速度線性變化假設(shè)的雙子樣機(jī)械編排算法,補(bǔ)償了姿態(tài)圓錐效應(yīng)、速度的旋轉(zhuǎn)效應(yīng)和劃槳效應(yīng)。
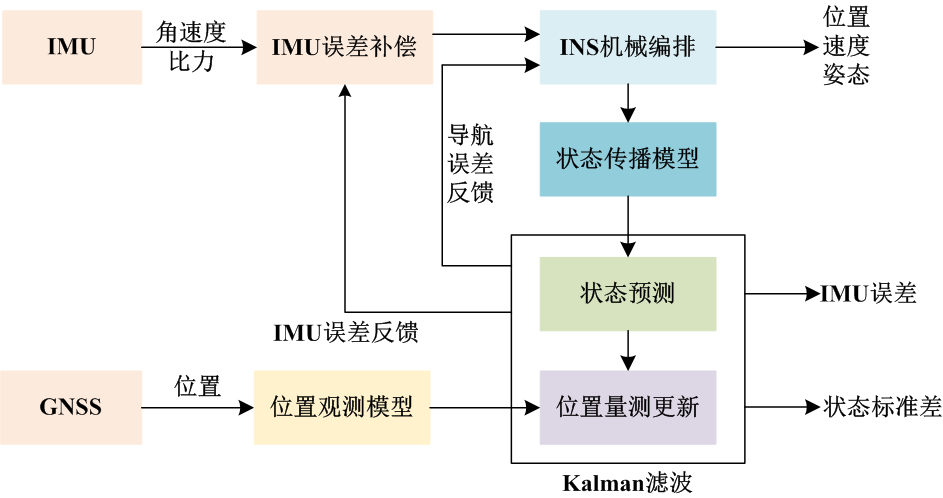
KF-GINS系統(tǒng)框架
這套代碼配套的組合導(dǎo)航測(cè)試數(shù)據(jù)集(包含不同精度等級(jí)IMU)可以通過(guò)如下鏈接獲取:
https://github.com/i2Nav-WHU/awesome-gins-datasets
審核編輯:劉清
-
卡爾曼濾波
+關(guān)注
關(guān)注
3文章
166瀏覽量
24970 -
GNSS
+關(guān)注
關(guān)注
9文章
838瀏覽量
48998 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14184瀏覽量
169398 -
慣性導(dǎo)航
+關(guān)注
關(guān)注
2文章
58瀏覽量
13747
原文標(biāo)題:開源代碼分享之KF-GINS:基于擴(kuò)展卡爾曼濾波的GNSS/INS組合導(dǎo)航算法
文章出處:【微信號(hào):SmartHWFW,微信公眾號(hào):SmartHWFW】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
GNSS和INS有什么區(qū)別?深度解析高精度組合導(dǎo)航技術(shù)
高精度組合導(dǎo)航系統(tǒng):技術(shù)與應(yīng)用的革新者
革新精準(zhǔn)導(dǎo)航:全球最精確的 GNSS/MEMS INS 系統(tǒng)
測(cè)繪級(jí)實(shí)力!GNSS+INS 重塑導(dǎo)航精度
測(cè)繪級(jí)超高精度,導(dǎo)航難題一鍵攻克
適用于GNSS(衛(wèi)星導(dǎo)航系統(tǒng))的國(guó)產(chǎn)溫補(bǔ)晶振,替換SiTime

GNSS信號(hào)不穩(wěn)定?測(cè)繪級(jí)GNSS+INS組合導(dǎo)航,一鍵解決難題
精準(zhǔn)到“厘米級(jí)”!組合導(dǎo)航系統(tǒng)讓你的無(wú)人機(jī)更加震撼
卡爾曼濾波在信號(hào)處理中的應(yīng)用分析
卡爾曼濾波在圖像處理中的應(yīng)用實(shí)例 如何調(diào)優(yōu)卡爾曼濾波參數(shù)
高精度GNSS+INS組合導(dǎo)航:速度、位置、姿態(tài)全掌握

卡爾曼濾波器的特性及仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論