") 【地平線旭日X3派試用體驗(yàn)】02.外設(shè)測試之使用SMBUS讀取MPU6050
【地平線旭日X3派試用體驗(yàn)】02.外設(shè)測試之使用SMBUS讀取MPU6050
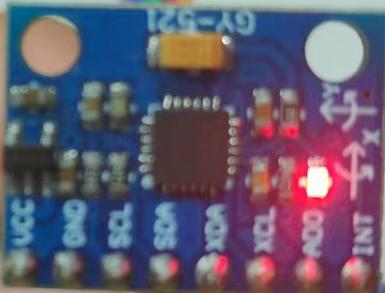
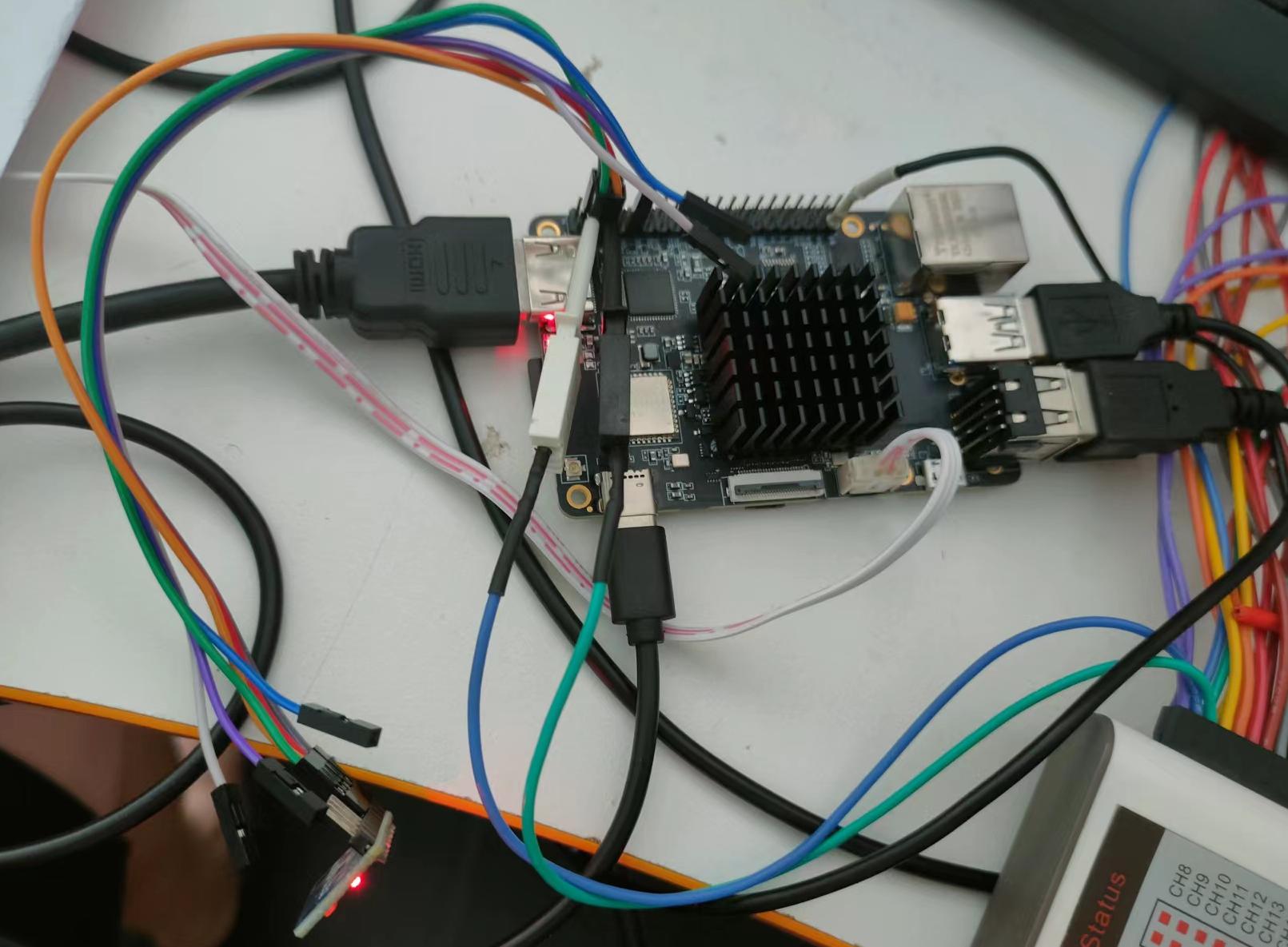
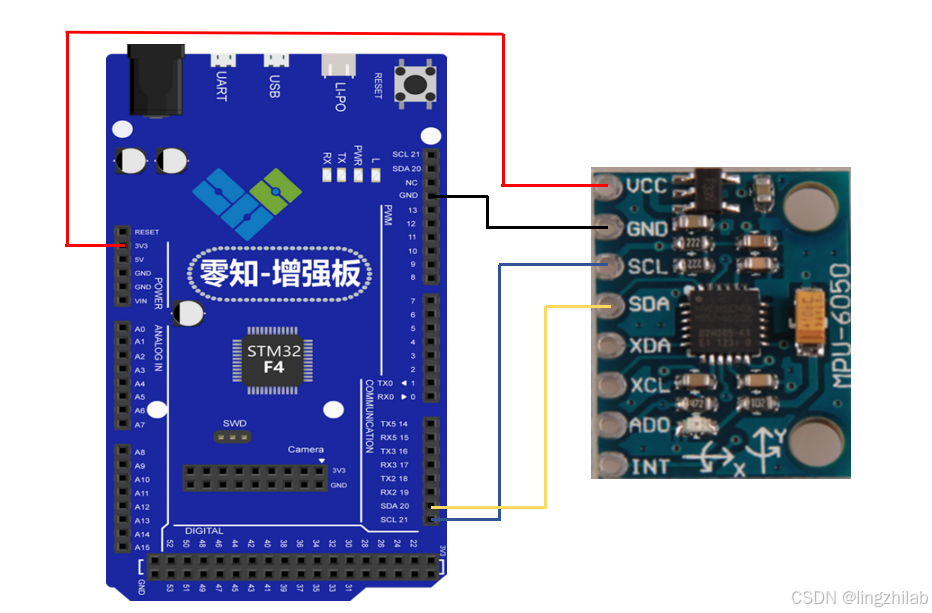
MPU6050是一款由三軸加速度和三軸陀螺儀組成的六軸IMU,可以支持I2C和SPI接口讀取數(shù)據(jù),目前本人手上的MPU6050模塊只支持I2C接口,電源為5V,MPU6050與X3派連接圖如下圖所示。
2、X3派安裝smbus
X3派目前不支持自定義源碼編譯,所有開發(fā)都是基于python環(huán)境的,I2C接口默認(rèn)安裝的是i2cdev,可以進(jìn)入python環(huán)境查看I2C模塊支持的函數(shù)如下圖所示。

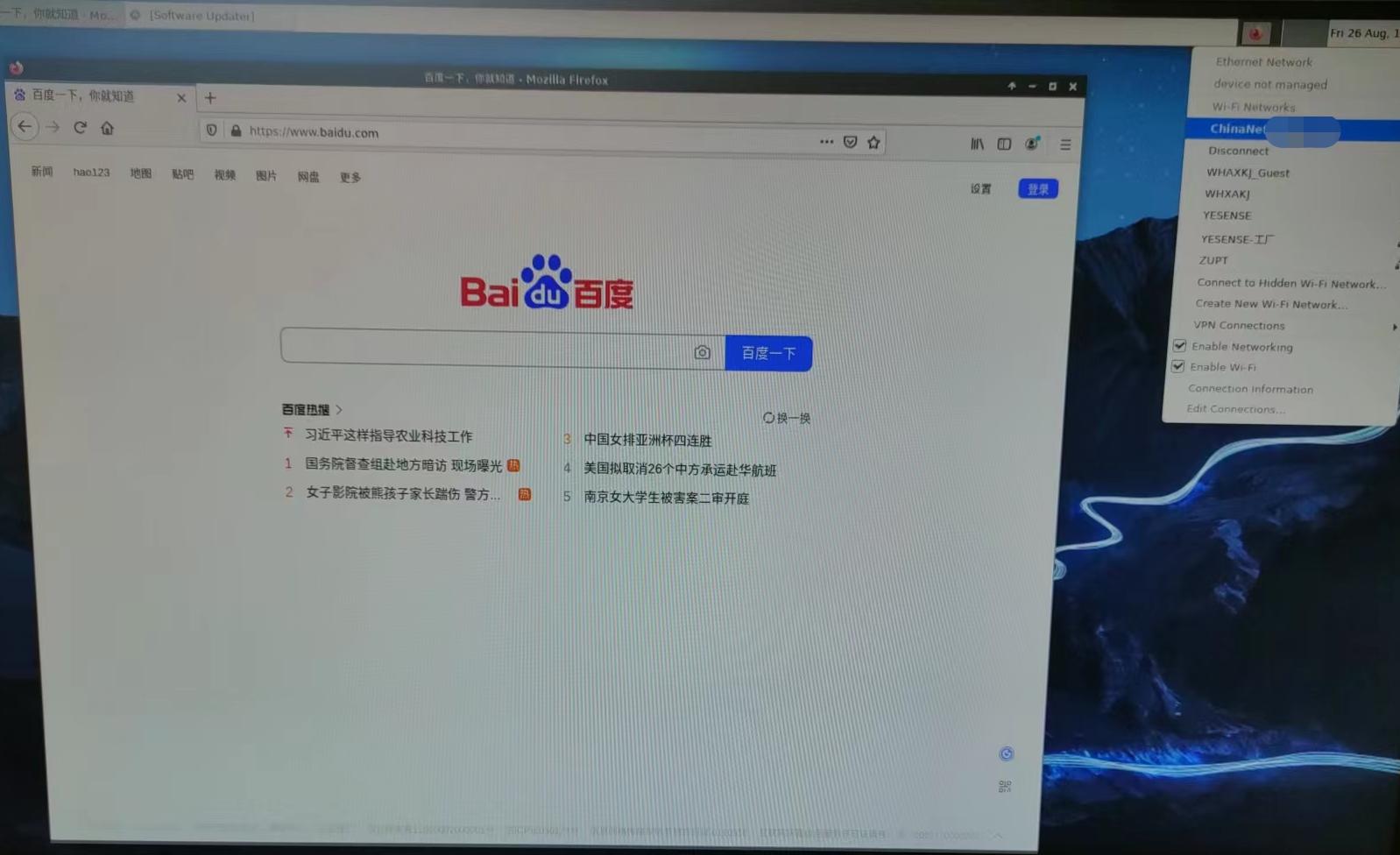
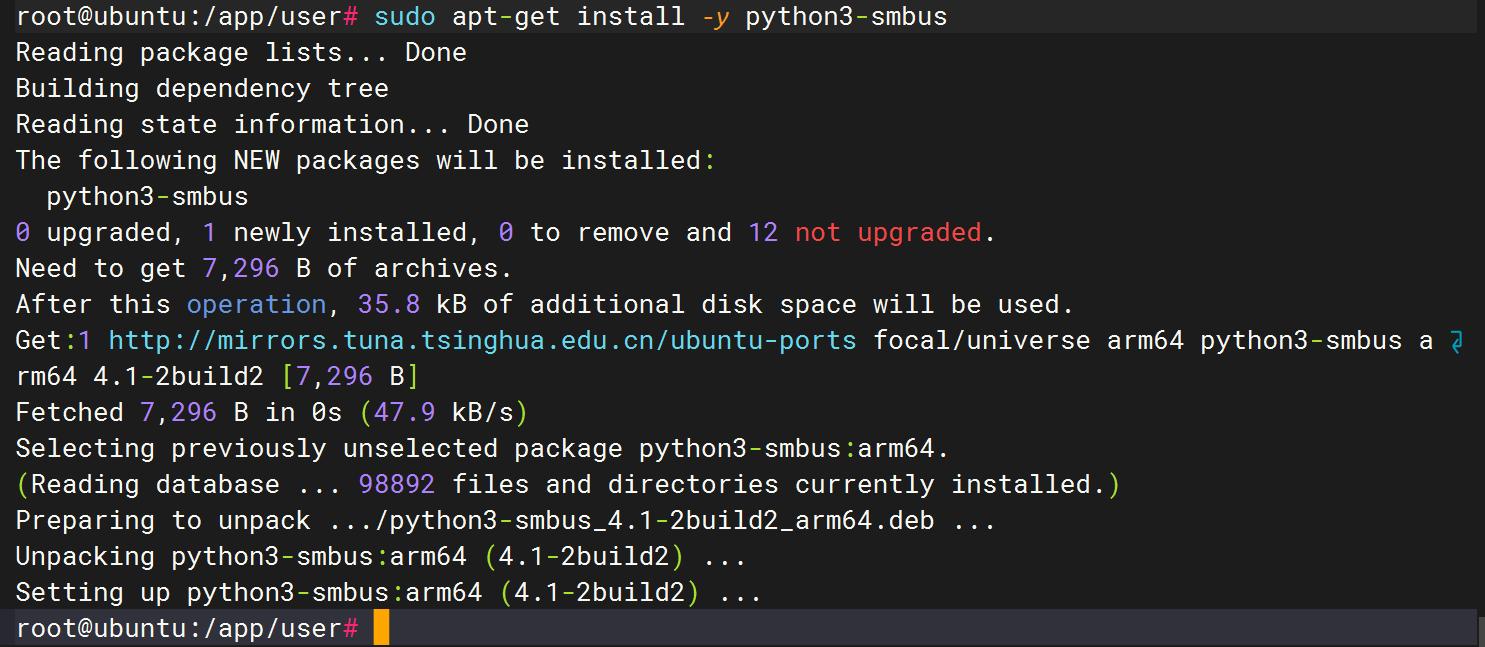
通過網(wǎng)絡(luò)了解到很多使用樹莓派安裝smbus來讀取MPU6050的信息,故萌生了在X3派上安裝smbus模塊來讀取MPU6050的數(shù)據(jù)想法。在安裝smbus之前需要將X3派聯(lián)網(wǎng),大家可以通過網(wǎng)卡或WIFI,這里我通過WIFI連接的,X3派連接上USB鼠標(biāo)和鍵盤就可以和windows上一樣操作了。
3、MPU6050數(shù)據(jù)讀取
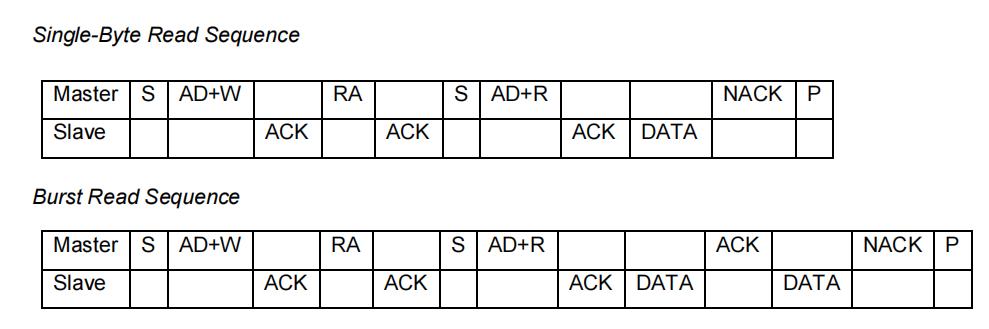
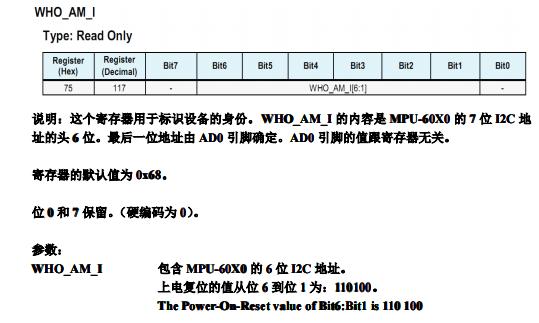
根據(jù)MPU6050的手冊可知其WHOAMI寄存器的值是一個(gè)固定值,一般也會(huì)通過這類寄存器來驗(yàn)證通信是否OK,WHOAMI寄存器的值為117(0x75),MPU6050的I2C從機(jī)地址為0x68,然后進(jìn)入python環(huán)境直接讀取,和邏輯分析儀抓取數(shù)據(jù)對(duì)比,如下圖所示。關(guān)于SMBUS的用法各位可以自行了解,這里不一一敘述。
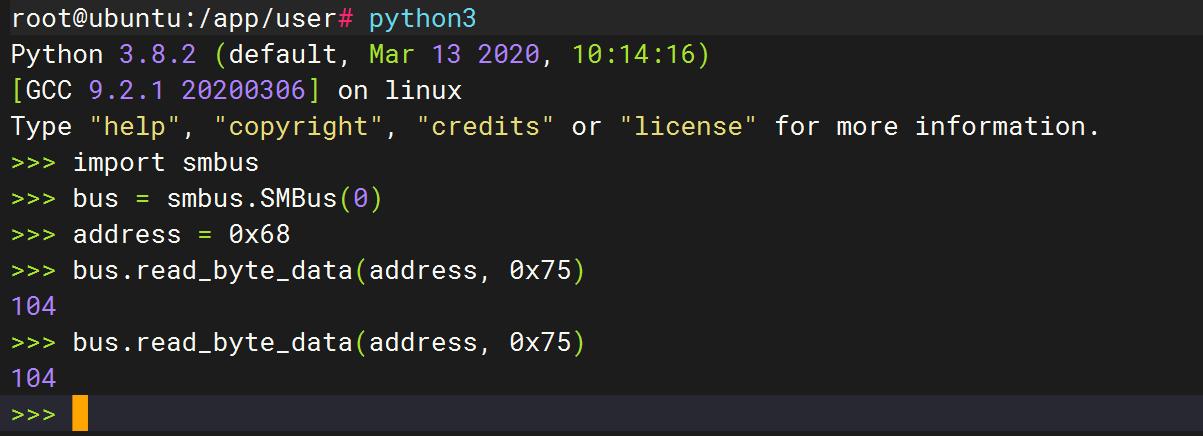

可以看到python環(huán)境讀取到的ID值和使用邏輯分析儀抓取的一致,且和MPU6050的手冊描述的一致,第0位為0,第6到1位為110100,即ID為0x68如下圖所示。目前I2C接口使用告一段落了。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
開發(fā)板試用
+關(guān)注
關(guān)注
3文章
301瀏覽量
2330
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
地平線與博世達(dá)成戰(zhàn)略合作
近日,地平線正式宣布與全球領(lǐng)先的汽車技術(shù)與服務(wù)供應(yīng)商博世達(dá)成戰(zhàn)略合作。根據(jù)協(xié)議,博世將基于地平線征程6B打造新一代多功能攝像頭,并基于征程6E/M打造博世縱橫輔助駕駛升級(jí)版。目前,基于征程6系列開發(fā)的博世新一代多功能攝像頭與博世縱橫輔助駕駛升級(jí)版均獲得多家車企的項(xiàng)目定點(diǎn)。
地平線城區(qū)輔助駕駛系統(tǒng)HSD解讀
近日,在2025地平線年度產(chǎn)品發(fā)布會(huì)上,地平線城區(qū)輔助駕駛系統(tǒng)HSD正式發(fā)布。作為國內(nèi)首個(gè)軟硬結(jié)合全棧開發(fā)的城區(qū)輔助駕駛系統(tǒng),地平線HSD搭載當(dāng)前最高性能的國產(chǎn)智駕計(jì)算方案征程6P,采用一段式端到端
地平線與上汽集團(tuán)深化戰(zhàn)略合作
近日,上汽集團(tuán)舉辦“懂車更懂你·2025上汽之夜”活動(dòng),地平線創(chuàng)始人兼CEO余凱博士受邀發(fā)表主旨演講。作為地平線第一大機(jī)構(gòu)股東,上汽集團(tuán)在發(fā)布會(huì)上表示將繼續(xù)拓展與地平線等頭部企業(yè)的合作,借助各自領(lǐng)域的優(yōu)勢資源互補(bǔ),打造擁有全新體
關(guān)于mpu6050問題
我很早之前買了一個(gè),我現(xiàn)在使用這個(gè)mpu6050,我在調(diào)mpu6050數(shù)據(jù)時(shí)候,數(shù)據(jù)抖動(dòng)特別大,我沒動(dòng)這個(gè)mpu6050,它自己都有抖動(dòng),然后本來放在水平,他的機(jī)械中值是2.5,但是我水平抖動(dòng)后,機(jī)械中值突然變成了-258,這是
發(fā)表于 03-09 17:17
零知開源——MPU6050六軸傳感器模塊實(shí)踐教程,輕松實(shí)現(xiàn)運(yùn)動(dòng)檢測!
運(yùn)動(dòng)。 ? ? ? 通過本教程,您將學(xué)習(xí)如何讀取并處理這些數(shù)據(jù),為您的項(xiàng)目添加運(yùn)動(dòng)檢測和姿態(tài)控制功能。 一、硬件連接 ? ? ? ?在開始編程之前,首先需要正確連接MPU6050模塊到零知增強(qiáng)板。 1.所需材料: 零知增強(qiáng)板 MPU60
零知開源——MPU6050六軸傳感器模塊實(shí)踐教程,輕松實(shí)現(xiàn)運(yùn)動(dòng)檢測!
。MPU6050是一款含有三軸加速度計(jì)和三軸陀螺儀的傳感器,能夠測量設(shè)備的傾斜情況和旋轉(zhuǎn)運(yùn)動(dòng)。
通過本教程,您將學(xué)習(xí)如何讀取并處理這些數(shù)據(jù),為您的項(xiàng)目添加運(yùn)動(dòng)檢測和姿態(tài)控制功能。
一、硬件連接
在開始編程
發(fā)表于 02-20 15:53
地平線征程6全球首發(fā)落地比亞迪天神之眼
近日,比亞迪在智能化戰(zhàn)略發(fā)布會(huì)上重磅發(fā)布全民智駕戰(zhàn)略,并推出天神之眼C高階智駕三目版(以下簡稱天神之眼C)。此次發(fā)布標(biāo)志著地平線最新一代車載智能計(jì)算方案征程6系列正式全球首發(fā)落地比亞迪天神之
地平線SuperDrive相關(guān)問答
近日,地平線SuperDrive智駕百人團(tuán)體驗(yàn)活動(dòng)圓滿落幕,現(xiàn)場130余家媒體對(duì)地平線SuperDrive表現(xiàn)出濃厚的興趣并提出了諸多問題。對(duì)此,地平線特意整理了大家提出的典型問題并進(jìn)行解答,希望能幫助大家更全面地了解這套擬人的
地平線SuperDrive首發(fā)三大黑科技
近日,“Beyond the Horizon 地平線智駕科技暢想日”在上海舉辦,回顧地平線以軟硬結(jié)合技術(shù)實(shí)力取得的量產(chǎn)創(chuàng)新成果,展望2025高階智駕爆發(fā)之年。同時(shí),“SuperDrive智駕百人團(tuán)體驗(yàn)活動(dòng)”在上海靜安區(qū)繁華路段開展,首發(fā)三大智駕黑科技,打造擬人高效、“10
MPU6050讀取數(shù)據(jù)有問題
在調(diào)試MPU6050時(shí)讀取原始數(shù)據(jù)只有X軸在變化,Y軸和Z軸的數(shù)據(jù)一直沒有變化,已經(jīng)調(diào)試兩天了,這個(gè)是讀取的數(shù)據(jù)
發(fā)表于 12-09 10:40
智駕科技企業(yè)地平線登陸港交所
近日,智駕科技企業(yè)地平線(地平線機(jī)器人-W,股票代碼:9660.HK)在香港交易所主板成功掛牌上市,募資總額高達(dá)54.07億港元,成為港股今年最大的科技IPO。
地平線Journey 3的電源設(shè)計(jì)
電子發(fā)燒友網(wǎng)站提供《地平線Journey 3的電源設(shè)計(jì).pdf》資料免費(fèi)下載
發(fā)表于 09-04 10:48
?0次下載

【龍芯2K0300蜂鳥板試用】+IIC設(shè)備讀取陀螺儀數(shù)據(jù)
開發(fā)板;
輸入i2cdetect -a 0進(jìn)行IIC設(shè)備檢測,檢測到0x68,陀螺儀的設(shè)備地址,如下所示:
4代碼設(shè)計(jì)
MPU6050初始化,打開I2C設(shè)備
IIC讀取MPU6050數(shù)
發(fā)表于 08-17 21:02





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論