 使用KeyPointRCNN輕松獲取人體的17個關鍵點
使用KeyPointRCNN輕松獲取人體的17個關鍵點
前言
TorchVision支持主流姿態評估模型關鍵點檢測模型KeyPointRCNN,通過它可以輕松獲取人體的17個關鍵點,跟OpenPose等模型相比,KeyPointRCNN基于TorchVision框架,遷移學習訓練簡單,支持一鍵導出ONNX格式,可以部署到ONNXRUNTIME與OpenVINO,支持C++與Python的SDK部署,可以說在易用性上絲毫不差!

KeyPointRCNN模型介紹
Torchvision中KeyPointRCNN已經是基于2021年的論文中的最新版本,效果非常好,2021年論文比2019論文最大的改動在預測的編碼與解碼部分,提出了CIF與CAF兩種新的編碼方法,模型結構圖示如下:
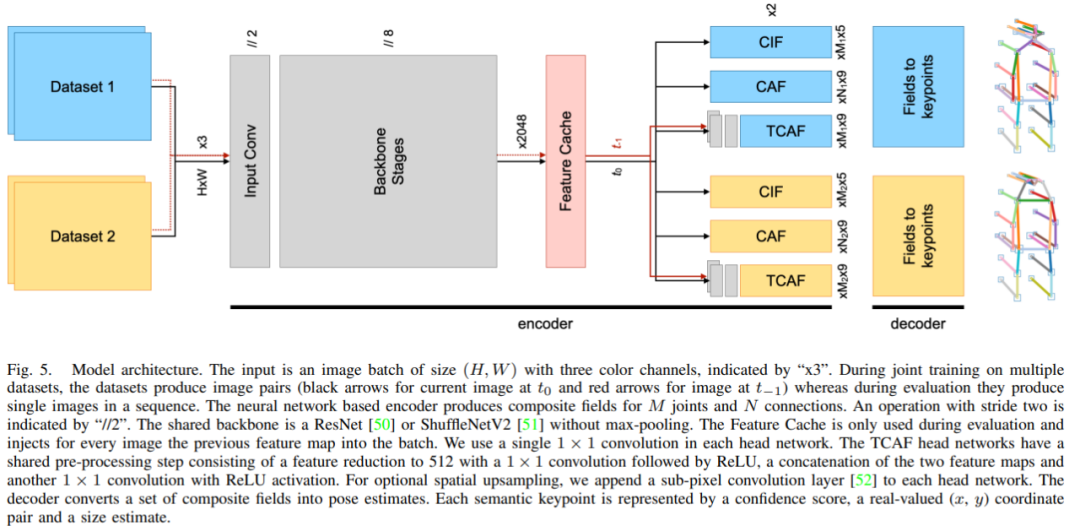
上述一段英文交代的比較清楚,模型輸入就是一張RGB彩色圖像,模型最終的輸出有四個部分組成,分別是boxes、labels、scores、keypoints,它們的輸出結構如下:
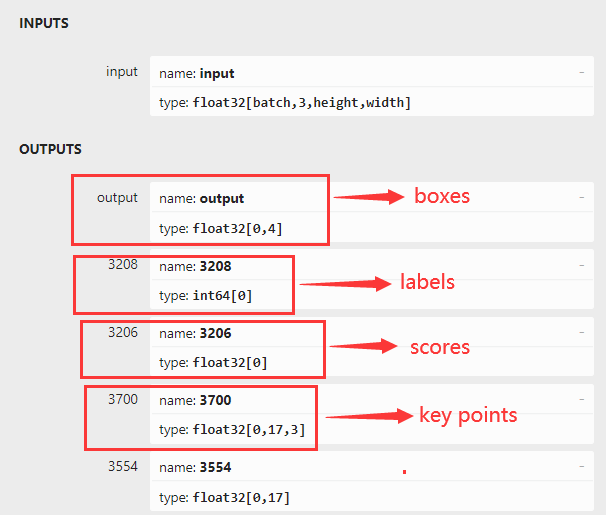
不是還有最后一個輸出層沒有解釋嗎,最后一個輸出層其實是各個關鍵點的得分信息,小于的基本上應該都被干掉,不可信。
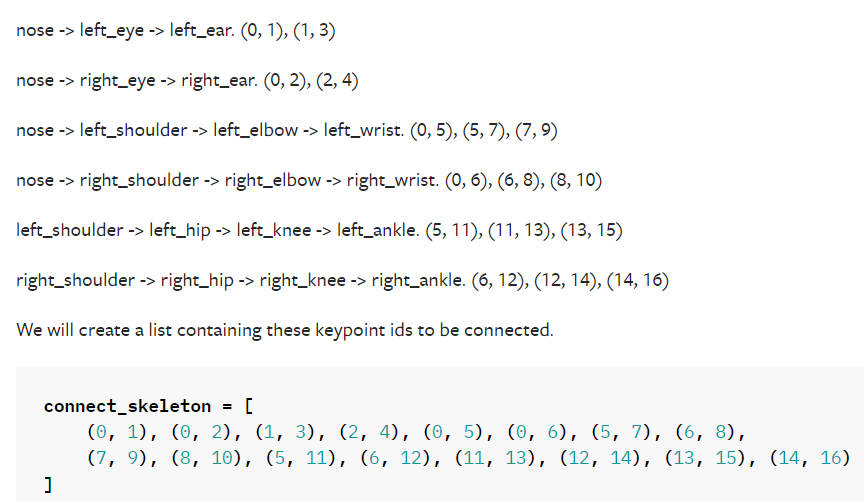
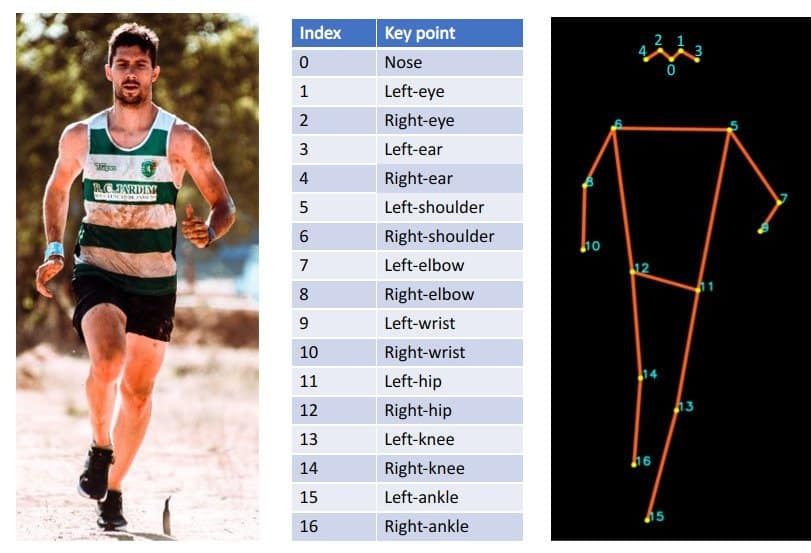
另外KeyPoint部分輸出是17x3,3表示x、y、v其中v表示是否可見,v為1表示該關鍵點可見、v為0表示該關鍵點不可見。 各個關節點的連接順序與編碼坐標如下(寫代碼有用的):
KeyPointRCNN推理演示
Torchvision官方提供了預訓練的模型,直接下載之后,通過下面的腳本就可以轉換為ONNX格式模型,然后通過ONNXRUNTIME就可以完成推理演示。
第一步,轉ONNX格式
相關腳本如下
model=torchvision.models.detection.keypointrcnn_resnet50_fpn(weights=KeypointRCNN_ResNet50_FPN_Weights.DEFAULT) model.eval() x=[torch.rand(3,300,400),torch.rand(3,500,400)] predictions=model(x) #optionally,ifyouwanttoexportthemodeltoONNX: torch.onnx.export(model,x,"keypoint_rcnn.onnx",opset_version=11)如果不工作,請參考這里的轉換腳本修改之: TorchVision對象檢測RetinaNet推理演示
第二步:ONNRUNTIME推理演示
這部分跟之前發過一篇RetinaNet推理文章非常相似,這篇文章的連接如下,代碼只是稍微改了那么一點點,增加了KeyPoint部分的可視化,推理部分的代碼如下:
importonnxruntimeasort
importcv2ascv
importnumpyasnp
importtorchvision
coco_names={'0':'background','1':'person','2':'bicycle','3':'car','4':'motorcycle','5':'airplane','6':'bus',
'7':'train','8':'truck','9':'boat','10':'trafficlight','11':'firehydrant','13':'stopsign',
'14':'parkingmeter','15':'bench','16':'bird','17':'cat','18':'dog','19':'horse','20':'sheep',
'21':'cow','22':'elephant','23':'bear','24':'zebra','25':'giraffe','27':'backpack',
'28':'umbrella','31':'handbag','32':'tie','33':'suitcase','34':'frisbee','35':'skis',
'36':'snowboard','37':'sportsball','38':'kite','39':'baseballbat','40':'baseballglove',
'41':'skateboard','42':'surfboard','43':'tennisracket','44':'bottle','46':'wineglass',
'47':'cup','48':'fork','49':'knife','50':'spoon','51':'bowl','52':'banana','53':'apple',
'54':'sandwich','55':'orange','56':'broccoli','57':'carrot','58':'hotdog','59':'pizza',
'60':'donut','61':'cake','62':'chair','63':'couch','64':'pottedplant','65':'bed',
'67':'diningtable','70':'toilet','72':'tv','73':'laptop','74':'mouse','75':'remote',
'76':'keyboard','77':'cellphone','78':'microwave','79':'oven','80':'toaster','81':'sink',
'82':'refrigerator','84':'book','85':'clock','86':'vase','87':'scissors','88':'teddybear',
'89':'hairdrier','90':'toothbrush'}
transform=torchvision.transforms.Compose([torchvision.transforms.ToTensor()])
sess_options=ort.SessionOptions()
#Belowisforoptimizingperformance
sess_options.intra_op_num_threads=24
#sess_options.execution_mode=ort.ExecutionMode.ORT_PARALLEL
sess_options.graph_optimization_level=ort.GraphOptimizationLevel.ORT_ENABLE_ALL
ort_session=ort.InferenceSession("keypointrcnn_resnet50_fpn.onnx",sess_options=sess_options,
providers=['CUDAExecutionProvider'])
src=cv.imread("D:/images/messi_player.jpg")
cv.namedWindow("KeyPointRCNNDetectionDemo",cv.WINDOW_AUTOSIZE)
image=cv.cvtColor(src,cv.COLOR_BGR2RGB)
blob=transform(image)
c,h,w=blob.shape
input_x=blob.view(1,c,h,w)
defto_numpy(tensor):
returntensor.detach().cpu().numpy()iftensor.requires_gradelsetensor.cpu().numpy()
#computeONNXRuntimeoutputprediction
ort_inputs={ort_session.get_inputs()[0].name:to_numpy(input_x)}
ort_outs=ort_session.run(None,ort_inputs)
#(N,4)dimensionalarraycontainingtheabsolutebounding-box
boxes=ort_outs[0]
#labels
labels=ort_outs[1]
#scores
scores=ort_outs[2]
#key_points
multi_key_points=ort_outs[3]
print(boxes.shape,boxes.dtype,labels.shape,labels.dtype,scores.shape,scores.dtype,multi_key_points.shape)
index=0
forx1,y1,x2,y2inboxes:
ifscores[index]>0.5:
cv.rectangle(src,(np.int32(x1),np.int32(y1)),
(np.int32(x2),np.int32(y2)),(140,199,0),2,8,0)
label_id=labels[index]
label_txt=coco_names[str(label_id)]
cv.putText(src,label_txt,(np.int32(x1),np.int32(y1)),cv.FONT_HERSHEY_SIMPLEX,0.75,(0,0,255),1)
kpts=np.int32(multi_key_points[index])
#nose->left_eye->left_ear.(0,1),(1,3)
cv.line(src,(kpts[0][0],kpts[0][1]),(kpts[1][0],kpts[1][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[1][0],kpts[1][1]),(kpts[3][0],kpts[3][1]),(255,255,0),2,8,0)
#nose->right_eye->right_ear.(0,2),(2,4)
cv.line(src,(kpts[0][0],kpts[0][1]),(kpts[2][0],kpts[2][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[2][0],kpts[2][1]),(kpts[4][0],kpts[4][1]),(255,255,0),2,8,0)
#nose->left_shoulder->left_elbow->left_wrist.(0,5),(5,7),(7,9)
cv.line(src,(kpts[0][0],kpts[0][1]),(kpts[5][0],kpts[5][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[5][0],kpts[5][1]),(kpts[7][0],kpts[7][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[7][0],kpts[7][1]),(kpts[9][0],kpts[9][1]),(255,255,0),2,8,0)
#nose->right_shoulder->right_elbow->right_wrist.(0,6),(6,8),(8,10)
cv.line(src,(kpts[0][0],kpts[0][1]),(kpts[6][0],kpts[6][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[6][0],kpts[6][1]),(kpts[8][0],kpts[8][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[8][0],kpts[8][1]),(kpts[10][0],kpts[10][1]),(255,255,0),2,8,0)
#left_shoulder->left_hip->left_knee->left_ankle.(5,11),(11,13),(13,15)
cv.line(src,(kpts[5][0],kpts[5][1]),(kpts[11][0],kpts[11][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[11][0],kpts[11][1]),(kpts[13][0],kpts[13][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[13][0],kpts[13][1]),(kpts[15][0],kpts[15][1]),(255,255,0),2,8,0)
#right_shoulder->right_hip->right_knee->right_ankle.(6,12),(12,14),(14,16)
cv.line(src,(kpts[6][0],kpts[6][1]),(kpts[12][0],kpts[12][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[12][0],kpts[12][1]),(kpts[14][0],kpts[14][1]),(255,255,0),2,8,0)
cv.line(src,(kpts[14][0],kpts[14][1]),(kpts[16][0],kpts[16][1]),(255,255,0),2,8,0)
forx,y,_,inkpts:
cv.circle(src,(int(x),int(y)),3,(0,0,255),2,8,0)
index+=1
cv.imshow("KeyPointRCNNDetectionDemo",src)
cv.waitKey(0)
cv.destroyAllWindows()
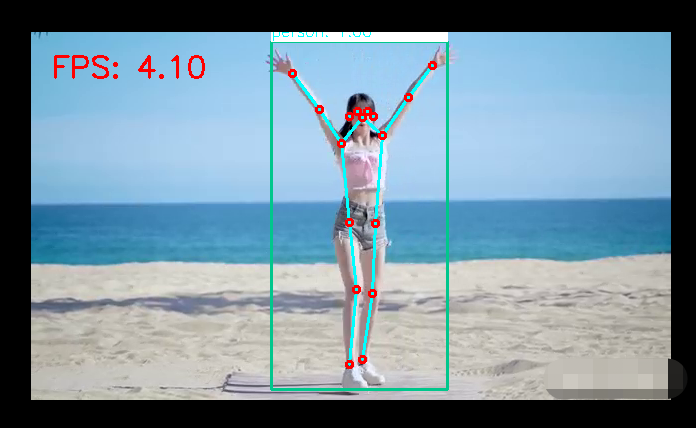
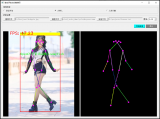
測試與運行結果如下:


基于3050的卡,GPU推理,速度!沒辦法模型有點大,速度有點慢,需要好N卡加持才能實時檢測!
審核編輯:劉清
-
編解碼
+關注
關注
1文章
145瀏覽量
19988 -
python
+關注
關注
56文章
4823瀏覽量
86144 -
CAF
+關注
關注
1文章
20瀏覽量
14711
原文標題:姿態評估之使用KeyPointRCNN關鍵點檢測模型輕松搞定!
文章出處:【微信號:CVSCHOOL,微信公眾號:OpenCV學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
學會這些方法,輕松搞定SMT貼片加工的坐標獲取與校正
自動駕駛中常提的“點云”是個啥?

SiC MOSFET驅動電路設計的關鍵點
如何獲取 OpenAI API Key?API 獲取與代碼調用示例 (詳解教程)
選購紅外熱像儀的12個關鍵點
深入探索:晶圓級封裝Bump工藝的關鍵點

XenD101H | 人體生命存在感應參考設計

ADS1293獲取的人體心電信號,如何實現隔直?
常見人體姿態評估顯示方式的兩種方式
處理器指令的獲取過程
人體體溫監測傳感器怎么用
EVASH + 云漢芯城戰略合作 購買EVASH Ultra EEPROM,解決采購難題,輕松獲取高性能存儲解決方案!
時間繼電器應用的三個關鍵點是什么?
開發者申請Gemini 1.5 Pro API Key:輕松獲取Gemini 1.5 Pro模型API Key并開發部署AI應用






 工商網監
工商網監
評論