 夏比試樣工位點定位算法設計
夏比試樣工位點定位算法設計
楊 巍,劉瓊
(武漢科技大學 信息科學與工程學院,湖北 武漢 430081)
摘要:針對當前夏比擺錘沖擊試驗中夏比試樣擺放方式具有一定危險性,且擺放位置精度易受影響問題,提出一種改進 LSD的夏比試樣工位點定位方法。首先對采集到的夏比試樣圖像進行預處理操作,基于預處理后的圖像,利用非極大值抑制改進 LSD算法中直線支撐域的種子點選取方法,實現加快直線檢測速度;然后對檢測得到的直線進行共線篩選合并;最后進行工位點定位。實驗結果表明,改進后的LSD算法在夏比試樣工位點定位用時更短、精度更高,具有較好的工程應用價值。
0 引 言
隨著社會的不斷發展,對鋼鐵的質量要求也越來越高,為了檢測生產的鋼鐵是否符合標準,需要對其進行試驗,夏比擺錘沖擊試驗就是用來測定金屬材料抗缺口敏感性的試驗[1]。將生產需要測試的鋼材制備成一定尺寸和具有 U 型或 V 型缺口形狀的金屬試樣,放置在試驗機上,以試驗機舉起的擺錘進行一次擊打,使得試樣沿著缺口沖斷,從而判斷材料是否合格[2]。國標中規定試樣缺口對稱面與試驗機砧座間的中點位置偏差小于0.5 mm,若夏比試樣缺口的擺放位置出現偏差則影響測試數據的準確度。夏比試樣缺口對稱面中心位置即為夏比試樣工位點,傳統定位方法是由人工利用特制的試樣對中夾鉗進行試樣的放置,操作人員利用夾鉗夾取試樣,當夾鉗的斜面與砧座的斜面正好吻合時則放置成功,完成定位,否則放置失敗。操作人員手動放置試樣示意圖如圖1所示。
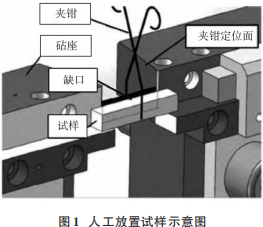
然而這種傳統擺放方式當需要試驗的試樣數量很大時,工作人員極易產生疲勞而影響試樣的擺放,若出現放置錯誤,不僅測試數據的準確度會受到影響,甚至會造成試樣飛濺,對工作人員的人身安全產生威脅。隨著智能化產線在工廠的逐步應用,通過人工擺放試樣的方式已經無法滿足需要,因此,研究夏比試樣工位點定位的方法具有一定的重要性。目前國內外利用圖像處理技術進行夏比試樣工位點定位的研究尚有欠缺,夏比試樣工位點定位最為重要的部分就是直線檢測部分,檢測結果直接影響著測試數據的準確性。
現有文獻對直線檢測的算法主要可分為兩種:基于邊緣檢測的方法和基于梯度變化的方法。基于邊緣檢測的方法需要先檢測邊緣再進行直線擬合,其擁有良好的運行速度、能融合全部信息等優點。文獻[3]對滿足條件的點進行霍夫變換,檢測試卷邊緣直線進行傾斜矯正。文獻[4]先使用Ratio算子進行電力線的邊緣檢測,再利用霍夫變換的方法進行電力線提取,霍夫變換易于實現,但易產生誤檢測,適用于線段長且邊緣明顯的場景。文獻[5]先利用Canny算子進行目標邊緣檢測,根據檢測信息用最小二乘法對機器人末端直線進行擬合,最小二乘法簡單便捷、速度快,但易受干擾點影響,較適用于干擾少的場景。文獻[6]采用LSD(Line Segment Detector)算法進行直線檢測來完成圖書分割,LSD 算法利用梯度信息檢測能有效區別相鄰線段,但較適用于直線連續性較低的場景。文獻[7]采用 EDLines 算法進行遙感影像直線提取,EDlines算法擁有良好的抗噪性且運行速度快,較適用于線段連續性要求不高的場景。考慮到夏比試樣邊緣粗糙且對線段連續性及檢測時間要求高,在研究了夏比試樣工位點定位原理后,本文提出一種基于改進LSD的夏比試樣工位點定位方法。利用改進的LSD算法快速準確地檢測出圖片中所有的直線,再通過直線合并后篩選出特征直線,實現夏比試樣的工位點定位。
1 圖像處理工位點定位原理
國內某鋼鐵廠生產的夏比試樣V型槽缺口面示意圖如圖2所示。標準尺寸的夏比試樣長度為55 mm,寬度和高度均為10mm,在試樣長度中間刻制有 V 型缺口,V 型缺口夾角為45°,其深度為2mm,底部曲率半徑[8]為0.25 mm。根據試樣擺放的要求,夏比試樣的工位點定位采用圖2中識別點坐標的方法,通過檢測ab,bc,ac三條直線段計算工位點的位置信息。將該位置信息與標準件測得的位置信息進行比較,將差值輸出給工業機器人,機器人根據偏差值進行矯正進而完成夏比試樣的擺放。
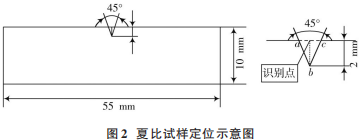
由以上分析可知,夏比試樣定位主要依靠檢測特征直線完成。根據國內某鋼鐵廠要求,輸出識別點位置的時間不得超過 800 ms,因此只需快速準確地檢測出夏比試樣圖像中的 V 型槽缺口特征直線即可。
2 夏比試樣工位點定位算法設計
2.1 夏比試樣工位點定位流程
為了對夏比試樣工位點進行定位,本文首先對采集的圖像進行預處理,對預處理后的圖像利用改進的LSD算法獲取夏比試樣圖像中的線段,再對檢測的線段進行篩選與共線合并,得到夏比試樣 V型缺口特征直線,最后通過計算得到夏比試樣工位點坐標。算法流程如圖3所示。

2.2 圖像預處理
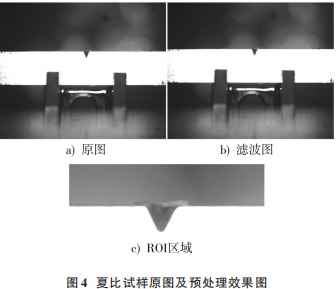
由于采集到的夏比試樣圖像較大,包含許多無關信息且存在很多噪聲,所以在進行直線檢測前需要對夏比試樣圖像進行預處理操作。首先對輸入圖像使用7×7模板的中值濾波,達到去除噪聲并保護邊緣的目的,再進行感興趣區域(ROI)提取,將圖像截取為僅包含夏比試樣V型缺口部分,濾除與工位點定位的無關信息。夏比試樣原圖及預處理各個階段的效果如圖4所示。
2.3 改進的 LSD 算法
LSD算法是一種可直接在灰度圖像中進行邊緣直線檢測的算法[9?10],其主要優點有:無需參數設定,能夠在線性時間內得到亞像素級精度的檢測結果,可很好地區分出相鄰線段,但其存在過分割問題,且在夏比試樣 V型槽特征直線檢測中耗時超過800 ms。本文對LSD算法中直線支撐域增長種子點的選取過程進行了改進,使用非極大值抑制篩選種子點。算法具體可分為以下步驟:
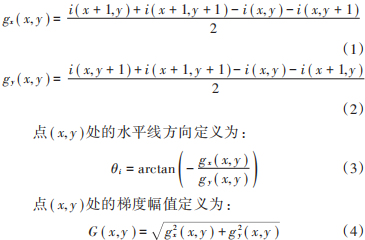
1)梯度信息計算。針對圖像中的鋸齒效應會影響檢測結果,對原始圖像進行高斯降采樣,使圖像按比例縮小為原圖的80%。然后計算圖像的像素梯度信息,LSD算法的梯度信息使用如圖5所示的2×2模板進行計算。

圖5中i (x, y) 為點(x,y) 的灰度值。i(x,y) 處x,y方向上梯度值gx (x, y ),gy(x,y)的定義如式(1)與式(2)所示:
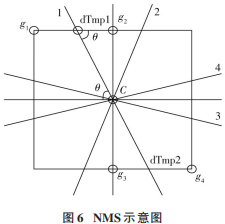
2)種子點選擇。像素點的梯度值越高則說明該處為強邊緣,所以直線支撐域增長從高梯度值像素開始,改進LSD算法采用在梯度方向上進行非極大值抑制(NMS)[11?12]的方法選取直線支撐區域增長的種子點。NMS可理解為局部最大值搜索,主要進行邊緣細化,在邊緣檢測、人臉檢測、目標檢測等領域廣泛應用,在本文中用來進行種子點的選擇。設置采樣頻率為3,對比中心像素與其梯度方向上的點dTmp1與dTmp2的梯度值,
若中心像素的梯度為極大值,則保留,反之舍棄。對于像素C進行 NMS 計算的示意圖如圖6所示。像素C在x方向梯度為gx,y 方向梯度為gy,當|gy|>|gx|,x,y方向的梯度方向一致時,對應圖中直線1,方向不一致時對應圖中直線2;當|gy|<|gx|,方向一致時,對應圖中直線4,方向不一致時,對應圖中直線3。
數字圖像中的像素點是離散的二維矩陣,點C處的梯度方向上的點 dTmp1 與 dTmp2 的梯度值需要通過對其兩側的點進行插值計算得到[13]。其計算公式如下:

式中:M (g1),M(g2)分別為g1,g2處的梯度幅值;M(g3),M(g4)分別為點g3,g4 處的梯度幅值;w 為權重。w 的計算公式如下:

式中gx,gy分別為中心像素的 x方向和 y方向梯度值。
通過上述非極大值抑制后得到候選種子點,設置梯度幅值閾值篩選種子點像素來提高直線檢測算法的效率及效果。該閾值計算公式為:

式中:q為灰度量化誤差上限;τ為直線支撐區域生長時梯度方向角的最大容差。經過閾值篩選后可得到種子點。
3)直線支撐區域增長。遍歷步驟2)中的種子點,且種子點不重復使用,以選取的種子點水平線的平均角度作為區域初始生長角度,搜索其8鄰域內未被搜索過的像素,當該像素的水平線角度與區域生長角度小于容忍度τ,則將其加入直線支撐區,并按照式(9)更新平均角度[14]。

式中θ為像素j的水平線角度。再以更新后的β繼續搜索,當該直線支撐區域無新的滿足條件像素點加入時,則停止生長,遍歷種子點并重復執行,可得到全部支撐區域。
4)直線生成。首先計算支撐區域的最小外接矩形,再計算得出該矩形的中心、方向角、長和寬等信息,經過該中心并且方向為該矩形的方向角的直線為其矩形包圍的支撐域所生成的直線。根據 Helmholtz 原則對生成的直線進行檢測[15]。定義直線區域 r的錯誤報警數(NFA)計算公式如下:

式中:N和M分別為該直線支撐域r的寬和高;n為區域內像素數目;k為與區域方向一致的像素點數目;p為給定精度。p的計算公式為:

式中τ為支撐域生長時梯度方向角的最大容差。如果直線支撐區域r的NFA小于ε,r為有意義的支撐域,可用于生成直線[16]。
2.4 線段篩選與合并
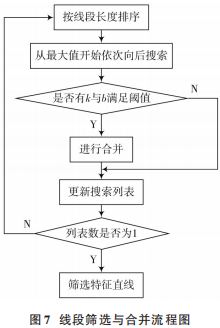
LSD算法易產生過分割,在完成直線檢測后,需要對LSD算法檢測得到的線段進行合并。首先對得到的線段集合P設置長度閾值α,過濾掉短線段后將剩余直線按照長度進行降序排列,從最長的線段L1開始依次搜索后面的線段,設L1線段的長度為len1,斜率為k1,截距為b1,遍歷剩余線段斜率和截距值,依次比對除該線段外的剩余線段的斜率和截距值,若兩條直線斜率和截距分別滿足閾值γ與β,則認為這兩條直線共線,需要進行合并,并將合并后的線段加入下一次搜索,否則認為其為非共線直線且不加入下一次搜索,線段篩選與合并流程圖如圖7所示。
對需要合并的線段L1,Li,合并后的斜率和截距計算公式如下:
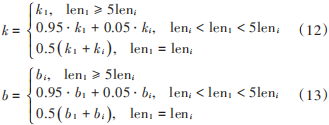
式中:len1和k1分別為線段L1的長度和斜率;leni 和ki分別為剩余線段Li 的長度和斜率。若L1的長度大于需要合并線段長度的5倍,則取L1線段的斜率和截距為合并后的斜率和截距;若L1的長度大于需要合并線段且小于其5倍長度,則將直線L1的斜率和截距權重設為0.95,需要合并線段的斜率和截距按權重為0.05進行計算;若需要合并線段長度相等,則將兩條線段的斜率和截距權重均設置為0.5,計算合并后的斜率和截距值。
3實驗結果及分析
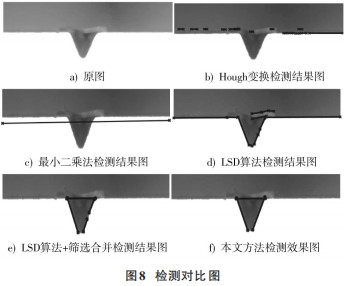
本文方法是在Windows 10系統下以Matlab 2018a作為實驗運行環境,處理器為Core [email protected]。實驗中LSD算法參數設置為:圖像縮放尺度為0.8,梯度方向角度閾值為22.5,最小外接矩形內部點數密度閾值為0.7,線段長度閾值α設置為30,斜率和截距閾值γ與β均設置為1.5。通過對國內某鋼鐵廠生產現場采集得到的夏比試樣V型缺口圖像進行實驗,分別使用 Hough變換、最小二乘法、LSD算法、LSD算法結合直線篩選合并和本文算法進行直線檢測,檢測效果如圖 8所示。
為了更好地量化檢測效果,本文采用平均放置誤差P 對以上幾種方法的直線檢測效果進行評估,平均放置誤差P定義如下:

式中:Pi為夏比試樣放置精度;N為試驗次數;Pix為檢測得到的夏比試樣工位點 x坐標信息;Bix為該圖像對應的夏比試樣實際測量的工位點 x坐標信息;Piy為檢測得到的工位點y坐標信息;Biy為實際測量的工位點y坐標信息。采用的幾種算法直線檢測量化結果如表1所示,本次試驗次數N為200。
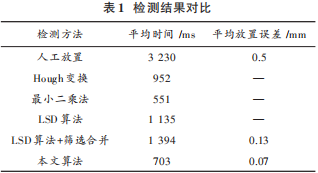
從圖 8b)可以看出,Hough變換能檢測出夏比試樣V 型缺口圖片中的部分線段,但有誤檢測,無法直接檢測出所需的特征直線,且需要根據不同的圖設置不同閾值。圖 8c)使用最小二乘法檢測,面對圖像中存在多個邊緣方向的情況下只擬合出一條直線,雖然平均用時最短,但由于干擾點過多導致特征直線檢測失敗。圖8d)中,LSD算法能有效檢測出圖像中的所有直線,由于邊緣粗糙導致過分割問題嚴重,且無法直接得出特征直線。圖 8e)使用LSD算法結合直線篩選合并,能檢測出V型缺口的部分特征直線,但部分線段依舊存在過分割問題且無法滿足時效性,特征直線存在殘缺導致平均放置誤差為 0.13 mm。圖8f)使用本文算法,從圖中可以看出,有效檢測出了夏比試樣 V 型缺口的特征直線,且平均放置誤差為0.07 mm,低于其余方法且滿足國標規定。本文算法的平均用時也明顯低于除最小二乘法以外的其余方法,這是由于本文提出的方法在種子點選擇時進行了非極大值抑制,使得種子點數量減少,在直線支撐域生長時種子點遍歷的時間復雜度為O(n),種子點數量n的值減少,則時間復雜度也隨之降低,從而擁有更高效率。綜上可知,本文提出的方法無論是放置誤差還是用時均符合生產實際要求。
4 結 論
為了對夏比試樣的工位點進行實時定位,本文根據夏比試樣特征提出了一種基于改進 LSD 的夏比試樣工位點定位方法。在傳統LSD算法的基礎上改進了直線支撐區域生長種子點生成方法,利用非極大值抑制來提取直線支撐區域的種子點從而進行直線檢測,最后通過直線篩選與合并,對過分割的線段進行合并來提取特征直線完成工位點定位。實驗結果表明,本文方法檢測速度更快,平均放置精度更高,有效解決了LSD算法的過分割和耗時長的問題。另外,由于夏比試樣制備時會產生毛刺,在未來研究中,可以對夏比試樣圖像邊緣進行進一步優化,以減弱邊緣毛刺對檢測結果的影響。
審核編輯:湯梓紅
-
圖像處理
+關注
關注
27文章
1323瀏覽量
57634 -
算法
+關注
關注
23文章
4695瀏覽量
94578 -
定位
+關注
關注
5文章
1397瀏覽量
35800
原文標題:論文速覽 | 基于改進 LSD 的夏比試樣工位點定位方法研究
文章出處:【微信號:現代電子技術,微信公眾號:現代電子技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
將MCL算法應用于無線傳感網絡節點定位技術
群集智能算法在WSN節點定位中的應用
基于RSSI測距的信標節點自校正定位算法
PLC在多點定位及往返系統中的控制研究






 工商網監
工商網監
評論