") 自動駕駛為什么一定要多傳感器融合
自動駕駛為什么一定要多傳感器融合

自動駕駛正成為影響未來行業(yè)的關鍵技術,車載傳感器是自動駕駛系統(tǒng)中感知外部世界的關鍵,它們就像車輛的“眼耳口鼻”,幫助車輛感知外部世界,聽覺視覺等缺一不可,這幾種感知的協(xié)作性能也直接決定自動駕駛車輛的安全性。
今天我們就來一起聊聊,自動駕駛中的“眼耳口鼻”共用——多傳感器融合是怎么一回事。
常見的車載傳感器有哪些?
目前業(yè)界主要使用三種傳感器,包括攝像頭、激光雷達、毫米波雷達。各種傳感器各有優(yōu)缺點,因此在自動駕駛系統(tǒng)中通常有不同的任務劃分。
攝像頭可以獲取光學圖像,并從一定角度準確記錄物體的顏色、紋理、色彩分布等信息。因此,一些研究使用攝像頭完成目標識別和目標跟蹤任務,包括道路檢測、行人和車輛識別以及局部路徑規(guī)劃。為了克服攝像頭可測量角度范圍窄的問題,在實際應用中,自動駕駛系統(tǒng)通常采用多臺攝像頭對周圍環(huán)境進行全方位監(jiān)控。
毫米波雷達通過脈沖壓縮測量物體的距離,并通過多普勒頻移測量物體的速度,這在障礙物檢測、行人識別和車輛識別中有廣泛的應用。
激光雷達的主要應用包括定位、障礙物檢測和環(huán)境重建。由于三維(3D)數(shù)據(jù)與二維數(shù)據(jù)相比具有一定的信息表示優(yōu)勢,它可以最大限度地恢復真實環(huán)境中的交通條件。結(jié)合毫米波雷達目標的動態(tài)特性、激光雷達的變化優(yōu)勢以及光學圖像中目標的細節(jié),利用綜合信息有助于車輛執(zhí)行各種任務,如意圖分析、運動規(guī)劃和自動駕駛。
為什么一定要多傳感器融合呢?
使用多傳感器融合技術的主要原因是為了揚長避短、冗余設計,提高整車安全系數(shù)。多傳感器融合系統(tǒng)所實現(xiàn)的功能要遠超這些獨立系統(tǒng)能夠?qū)崿F(xiàn)的功能總和,相當于1+1>2。使用不同的傳感器種類可以在某一種傳感器全都出現(xiàn)故障的環(huán)境條件下,額外提供一定冗余度。這種錯誤或故障可能是由自然原因(例如,濃霧天氣)或是人為現(xiàn)象(例如,對攝像頭或雷達的電子干擾或人為干擾)導致。各傳感器優(yōu)缺點如下:
| 最遠探測距離 |
探測 精度 |
優(yōu)勢 | 劣勢 | |
| 攝像頭 | 50m | 一般 |
?分辨率高 ?能探測物體質(zhì)地和顏色 ? 成本低 |
?逆光或光影復雜情況效果差 ?受惡劣天氣影響 ?受視野影響 |
| 毫米波雷達 | 250m | 較高 |
?不受物體形狀和顏色影響 ?探測精度高,受環(huán)境影響小 ?性價比高 |
?無法探測行人 |
| 激光雷達 | 200m | 極高 |
?探測精度高 ?可以繪制出3D環(huán)境地圖 |
?成本高昂 ?受不良天氣影響較大 |
多傳感器融合的挑戰(zhàn)
目前市面上大多數(shù)自動駕駛的方案均包含攝像頭、激光雷達和毫米波雷達,使用同一個系統(tǒng)來采集并處理數(shù)據(jù),我們需要對這些傳感器統(tǒng)一坐標系和時鐘,目的就是為了實現(xiàn)三同一不同:即在同一時刻,同一地理坐標,同一目標出現(xiàn)在不同類別的傳感器中。
想必看到這里,聰明的你能意識到,這也不是一件容易的事情,想要達到三同一不同,就要克服不少挑戰(zhàn)。
挑戰(zhàn)1:統(tǒng)一時鐘
在這里要做的就是同步不同傳感器的時間戳,本次我們主要介紹兩種方法。
GPS時間戳的時間同步方法:該種方法中,傳感器硬件需支持GPS時間戳,如果支持,則傳感器輸出的數(shù)據(jù)包會有全局的時間戳,這些時間戳以GPS為基準,那么就相當于不同的傳感器均以GPS為基準,等同于使用了相同的時鐘,而非傳感器各自的時鐘了。
另外一種方法叫硬同步方法:這種方法可以減小查找時間戳造成的誤差。該方法可以以激光雷達作為觸發(fā)源,輸出給其它傳感器,當激光雷達轉(zhuǎn)到某個角度時,才觸發(fā)該角度的攝像頭,這可以大大減少時間差的問題。這套時間同步方案可以做到硬件中,這樣可以大大降低同步誤差,提高數(shù)據(jù)同步效果。
挑戰(zhàn)2:統(tǒng)一坐標系
統(tǒng)一坐標系有兩步,一是運動補償,二是傳感器標定。由于所有的傳感器都裝在車上,車是運動的剛體。因此傳感器在采集數(shù)據(jù)時,周期開始的時間點和結(jié)束時間點車輛是處于不同位置的,導致不同時刻采集的數(shù)據(jù)所處坐標系不同,因此需要根據(jù)車體的運動對傳感器采集的數(shù)據(jù)進行運動補償。
傳感器標定分為內(nèi)參標定和外參標定,內(nèi)參標定,解決的是單獨的每個傳感器與世界坐標系間的變換;外參標定是在世界坐標系下,解決的不同傳感器間的變換。傳感器外參校準依賴于傳感器的精確內(nèi)參校準。
挑戰(zhàn)3:融合方法
經(jīng)過以上幾步,可以拿到的信息有:做好運動補償及時間同步的傳感器源數(shù)據(jù)、傳感器內(nèi)參、傳感器外參,有了這些信息后,我們可以做相應的融合方法了。到底如何做呢?下面舉兩個例子:
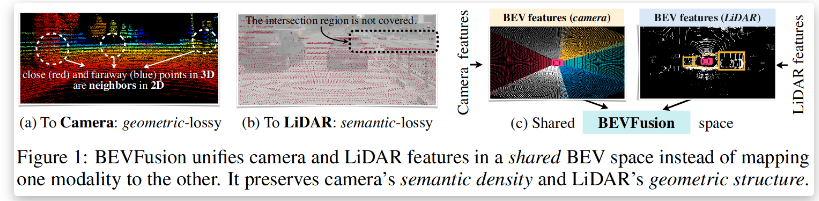
攝像頭和激光雷達融合:激光雷達數(shù)據(jù)是包含了明確的(x,y,z)數(shù)據(jù)的3D觀測,通過標定參數(shù)與攝像頭本身的內(nèi)參,多傳感器深度融合可以實現(xiàn)把3D點投到圖像上,圖像上的某些像素也就打上了深度信息,幫助感知系統(tǒng)進行基于圖像的分割或者訓練深度學習模型。
毫米波雷達和激光雷達融合:毫米波雷達和激光雷達的融合方式比較簡單。在笛卡爾坐標系下,它們擁有完整的( x,y )方向的信息。因此在笛卡爾坐標系下,激光雷達和毫米波雷達可以實現(xiàn)基于距離的融合。另外,毫米波雷達還可以探測到障礙物速度,而激光雷達通過位置的追蹤,也會得到對障礙物速度的估計,對這些速度的信息進行融合,更能幫助篩選錯誤的匹配候選集。
從目前國內(nèi)對于自動駕駛的策略來看,多種傳感器提高安全冗余是普遍采用的路線。那對于多傳感器融合的硬件在環(huán)測試也是必要的一環(huán)。
講了這么多,你對多傳感器融合是否有了一些了解呢?針對這樣的自動駕駛趨勢,是德科技也在全面布局,不僅針對單個雷達有測試解決方案,對雷達場景模擬以及多傳感器融合方向也在推陳出新,推出ADE(Autonomous Driving Emulation)解決方案以及發(fā)布不久的雷達場景模擬器。
-
傳感器
+關注
關注
2565文章
52982瀏覽量
767275 -
攝像頭
+關注
關注
61文章
4978瀏覽量
98351 -
激光雷達
+關注
關注
971文章
4234瀏覽量
192836 -
自動駕駛
+關注
關注
789文章
14316瀏覽量
170598
原文標題:1+1>2? “眼耳口鼻”共用的自動駕駛系統(tǒng)
文章出處:【微信號:是德科技KEYSIGHT,微信公眾號:是德科技KEYSIGHT】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證

自動駕駛汽車是如何準確定位的?

技術分享 |多模態(tài)自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

BEVFusion —面向自動駕駛的多任務多傳感器高效融合框架技術詳解
物聯(lián)網(wǎng)中的傳感器類型解析 傳感器類型在自動駕駛中的應用
多傳感器融合在自動駕駛中的應用趨勢探究

一文聊聊自動駕駛測試技術的挑戰(zhàn)與創(chuàng)新






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論