 基于AUTOSAR的CAN通訊介紹
基于AUTOSAR的CAN通訊介紹

1、信號角度
從信號角度,主要想再說明下:信號在CAN總線上是電壓形式,在軟件中是二進制數,這是怎么轉換的?信號在軟件中是如何變化的?
1.1 數模轉換
通過本系列前面文章,我們知道ECU之間通過CAN總線通訊。從信號轉換角度:模擬信號到數字信號,比如接收,如圖1所示。
其具體過程為:在CAN總線上,信號表現為電壓形式,其具體值根據ISO11898和ISO11519標準的定義而來。然后電壓信號經過CAN收發器轉換成數字信號,即邏輯電平0和1。
接著這些邏輯電平序列將被ECU硬件單元處理,丟棄或存入寄存器。反之,發送過程其實就是一個數字信號到模擬信號的轉換過程。
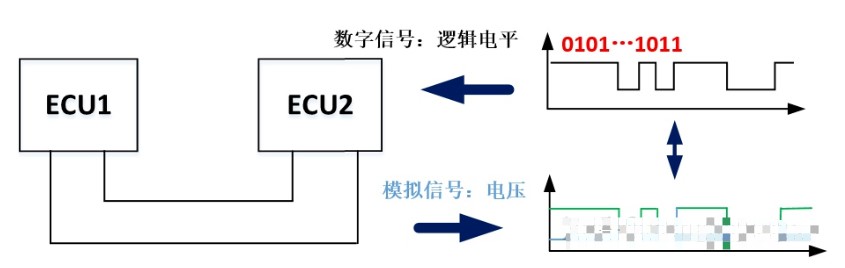
圖1 CAN總線到ECU的信號轉換
這里若需掌握各個環節的細節:
關于CAN總線特性,可通過ISO11898,ISO11519系列標準研究總線的電器和物理特性。
關于信號轉換實現,可研究CAN收發器的原理與特性等。
關于寄存器存儲,可細讀相應的芯片手冊,并動手去配置芯片和調試代碼。
1.2 信號變化
上述的邏輯電平序列有什么規律?有什么作用?通過前面文章我們知道CAN協議標準定義了這些邏輯電平序列,使這些數據有了實際意義,其實就是一些數據幀,遙控幀等的信息。
通過配置CAN硬件單元,比如利用IDE的數據就可以決定ECU是否接收某個CanId的數據,進而再準確將接收的相應數據存入相應的寄存器,比如IDE存入IDE相關的寄存器,DLC存入長度相關的寄存器。
當軟件通過硬件接口訪問相應的寄存器,就可以讀取到對應的數據,比如長度,數據等信息。這樣軟件按照OSI參考模型的架構將這些讀取的數據以協議數據單元(PDU)格式逐層向上傳輸,直到將PDU解包成報文通訊協議規定的信號形式,整個過程如下圖2所示。
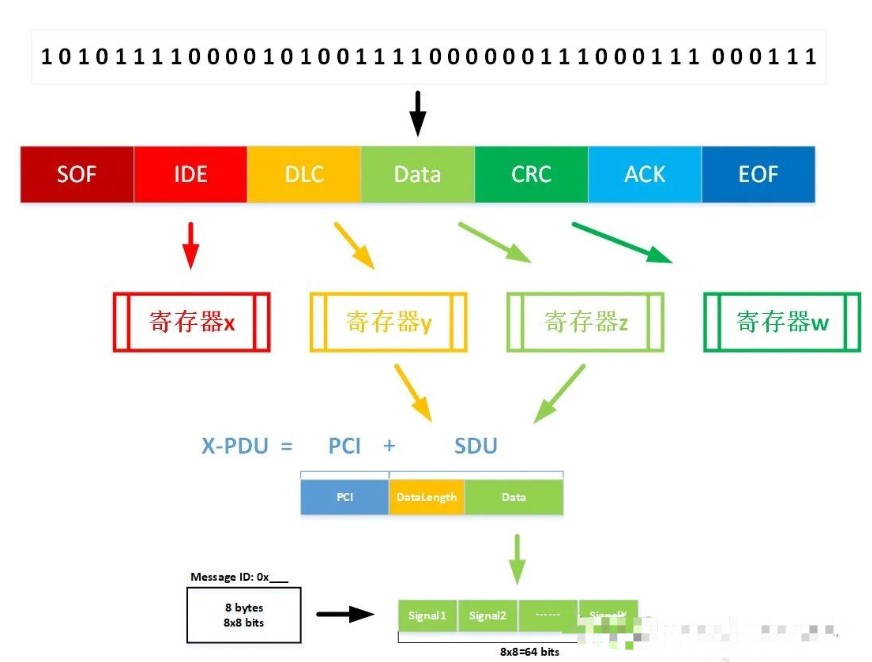
圖2 CAN通訊的信號變化過程 這里若研究各個環節的實現:
關于CAN幀定義,可細讀CAN協議和ISO11898-1標準。
關于寄存器的存儲與提取,可研究相應的芯片手冊。
關于CAN通訊架構,可參考OSI參考模型,ISO17356和AUTOSAR文檔等。
2、軟硬件角度
從軟硬件角度,要實現怎么樣CAN通訊功能,就決定了要用怎樣的硬件和軟件。那么從軟件工程師角度,是怎么看硬件?又是怎么看軟件的?
2.1 硬件
從軟件工程師角度,主要是根據芯片手冊,ECU原理圖和其他驅動的用戶手冊來助于對軟件的理解,比如了解CAN的硬件連接,即從總線連接到哪個PIN,PIN連接到什么收發器,收發器連接到芯片的哪些引腳。或者了解提取寄存器數據,要對芯片進行的哪些配置,怎么配置等。或者更深入地就是硬件特性變化會對軟件產生怎樣的影響等等。
2.2 軟件
從前面文章我們知道,先明確了一個清晰的軟件架構,如下圖3的中間部分,再從控制流和數據流考慮。若采用一個極其簡單的架構,如圖3最左側部分,從寄存器提取完數據,直接給應用層去解析。
但這樣的架構顯然滿足不了軟件的安全性,可移植性,可重用性和可擴展性等要求,所以為了滿足這些要求,會采用基于OSI參考模型的AUTOSAR架構,如圖3最右側部分,只允許CAN Driver 訪問硬件,向上只對接CAN Interface,與上層的模塊通訊均由CAN Interface統一管理,通過PduR路由到更多的上層模塊,減少接口等等。
當然前面文章出于內容更易懂且精煉的考慮,采用了圖3中間部分的基于OSI參考模型的AUTOSAR架構的簡約版。
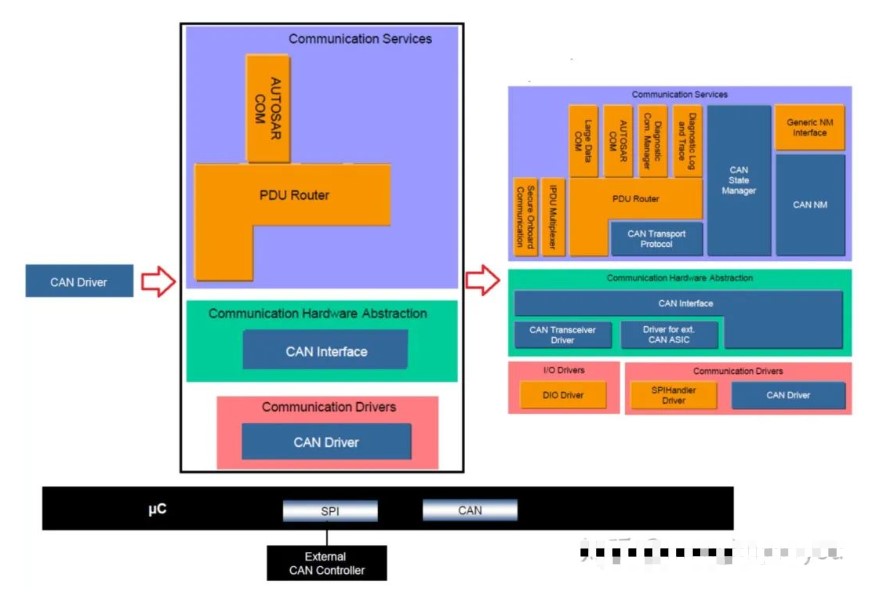
圖3 CAN通訊的軟件架構,引自[1]
這個軟件架構的CAN通訊控制流如下圖4所示。前面文章已經大體上介紹了CAN發送與接收的控制過程,比如不同模塊如何進行數據傳輸,同一模塊中數據傳輸所需具備的條件。另外也介紹了這些過程所涉及的接收通知,發送,發送確認的相關函數與動作。抽象地講就是實現一個功能需先要以一定的時序組織不同的模塊,然后各個模塊要滿足各自一定的條件才去采取執行某些活動,最后考慮這些活動如何具體地一步一步實施。
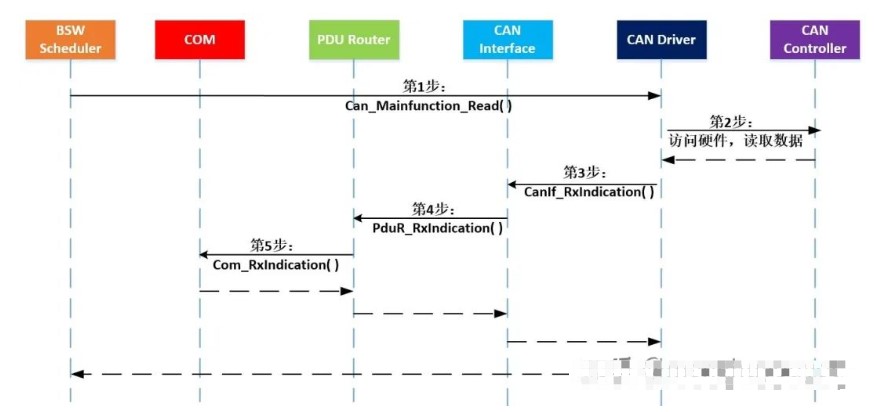
圖4
當然通過控制流不難發現,數據流也極其重要。基于OSI參考模型,協議數據單元(PDU)在不同的層會有不同的名字,比如數據鏈路層的PDU叫L-PDU,網絡層的PDU叫N-PDU,交互層的PDU叫I-PDU。我們根據這些PDU和其他信息的映射關系,鏈接關系,就可構建起整個CAN通訊功能的數據流,類似于圖5。
這樣使得我們能更好理解AUTOSAR配置工具,比如VECTOR或EB工具配置內容的設置和鏈接關系;也能更深入AUTOSAR的CAN通訊實現原理與方法,比如硬件的訪問機制,從L-PDU到N-PDU到I-PDU的映射邏輯等。
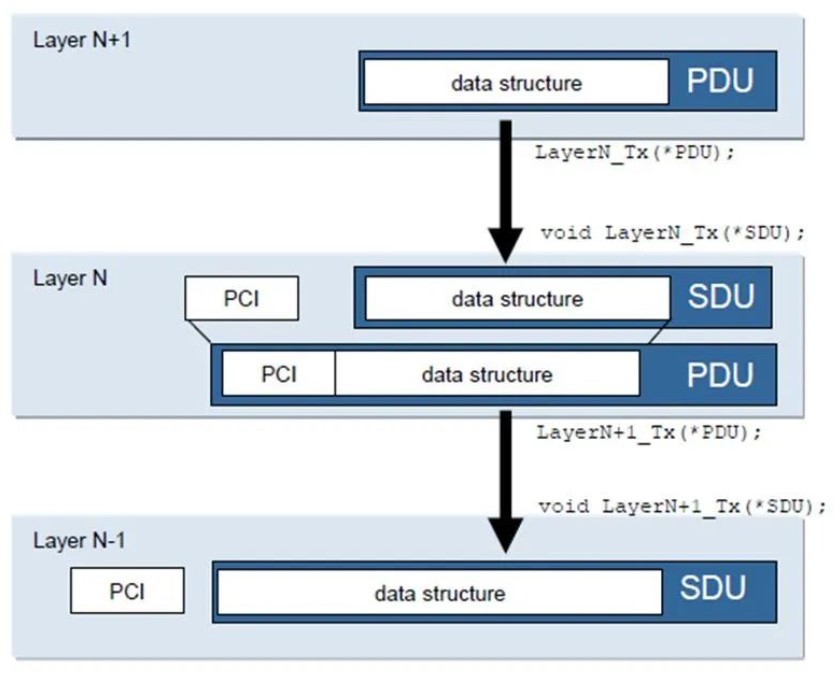
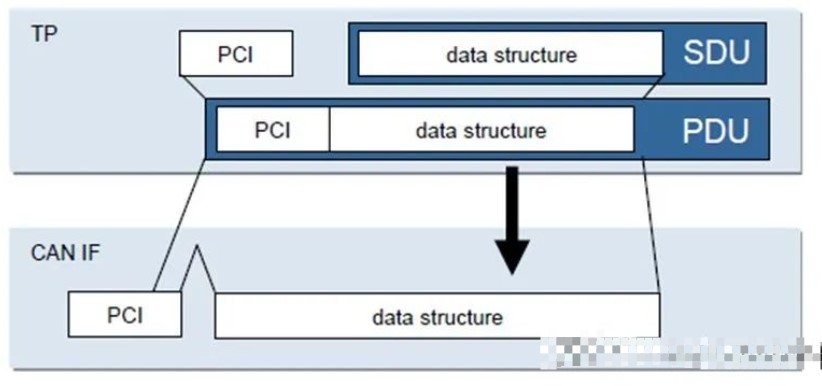
圖5 PDU的傳輸,引自[1]
這里若想研究軟件的各個模塊,可根據ISO11898-1, ISO17356-4和相關AUTOSAR文檔。
3、功能視角
功能需求決定了硬件和軟件,所以先看軟件實現了怎么樣的功能,然后再看軟件具體是怎樣實現的。正如目前文章介紹的只是最常見的CAN通訊發送與接收功能,沒有考慮通訊錯誤的情況,也沒有考慮總線關閉的情況。為了完善CAN通訊基本功能,也為了強化CAN通訊功能,下面將大概列舉出來,也算是預告下后面文章的內容。
對于CAN通訊錯誤的情況,CAN協議標準定義了一套完成的錯誤處理機制。比如: 針對總線信號有定義錯誤幀,下圖6所示。
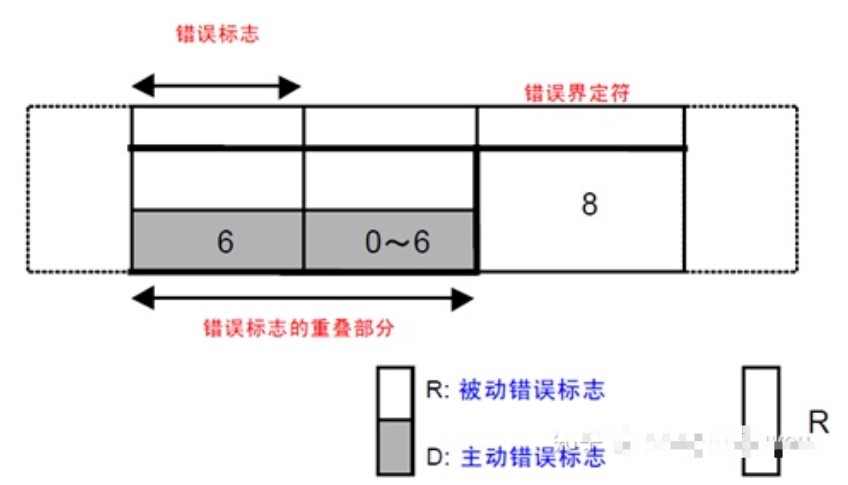
圖6 錯誤幀定義,引自[2]
針對總線通訊單元有定義主動錯誤,被動錯誤和總線關閉狀態,如圖7所示。
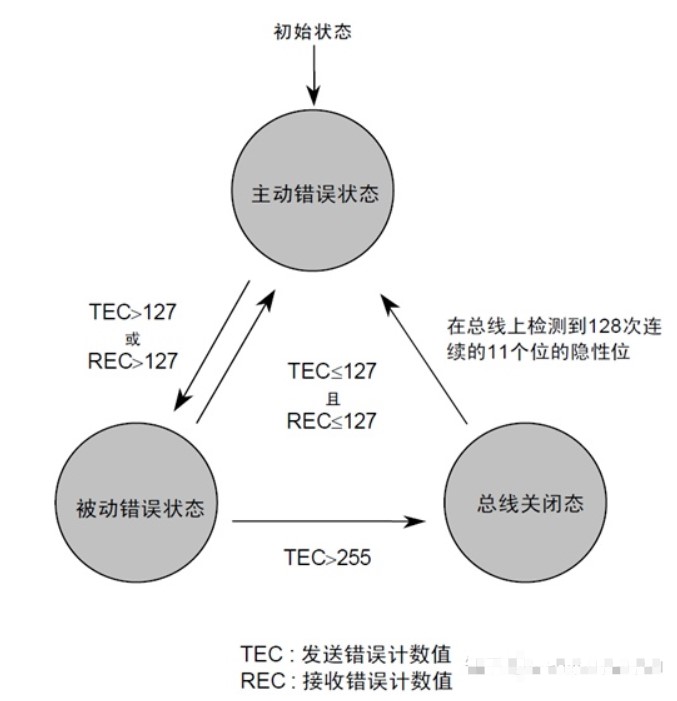
圖7 單元的錯誤狀態,引自[2]
針對CAN通訊網絡有定義無通訊模式,靜默模式,完全通訊模式,如圖8所示。
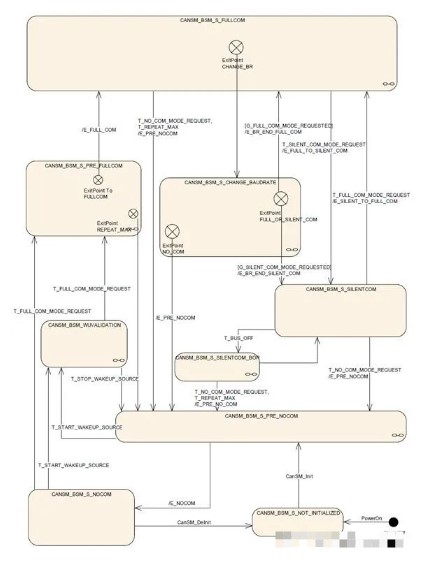
圖8 CanSM狀態機,引自[3]
對于CAN數據幀數據長度不夠的情況,有提出一種更靈活的CAN數據幀,即CANFD。 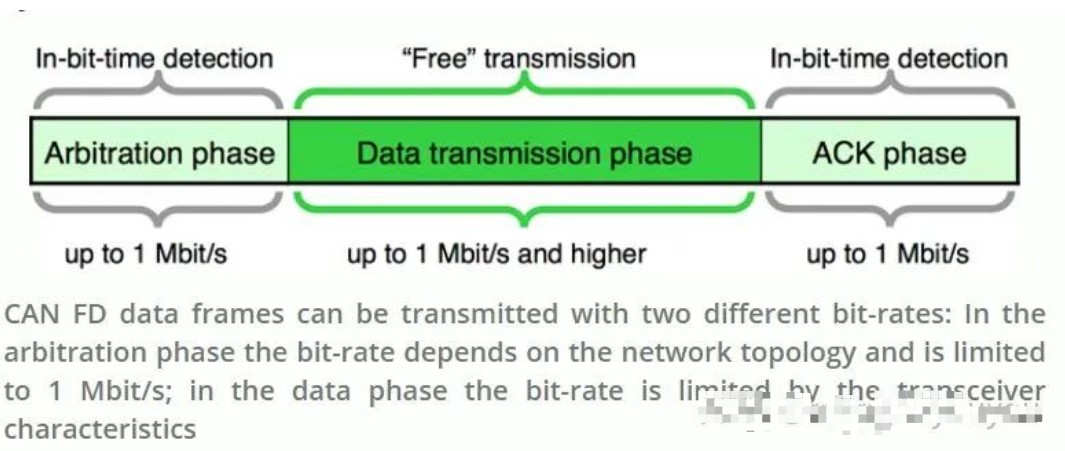
圖9 CANFD概念,引自[4]
對于CAN通訊網絡能被喚醒的情況,如下圖10所示。
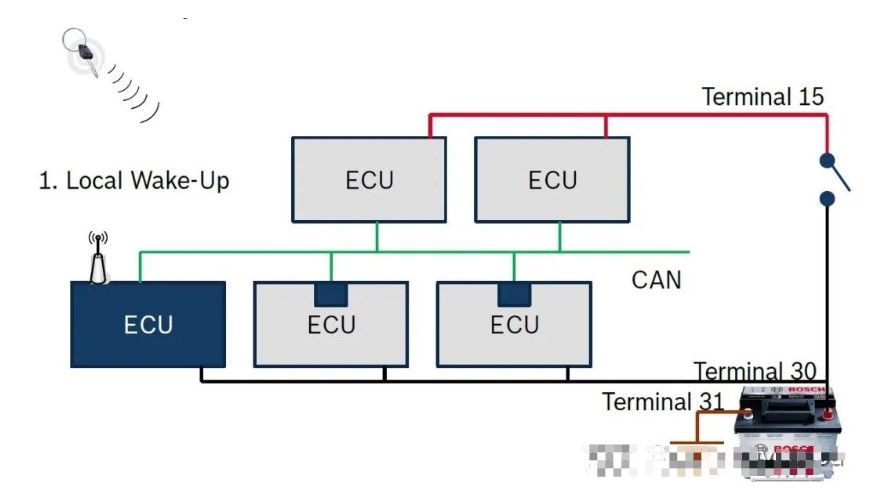
圖10 具備喚醒的CAN網絡示意,引自[5]
就先列出這些典型的CAN通訊功能,通過這些新功能不難發現:為了應對日益增加的功能需求,不管是針對個人還是企業,硬件還是軟件,其實都需要不斷地進行更新和強化。
到此我們就從3個視角既回顧了CAN通訊的基本發送與接收功能,也提出了CAN通訊的新功能,為了讓大家更加全面且系統地了解CAN通訊功能,后面文章將在CAN發送與接收的主樹干上繼續生枝發葉。
審核編輯:劉清
-
收發器
+關注
關注
10文章
3673瀏覽量
108016 -
AUTOSAR
+關注
關注
10文章
380瀏覽量
22700 -
can通訊
+關注
關注
1文章
31瀏覽量
11000
原文標題:從3個視角談CAN通訊
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
如何解決CAN通訊故障?原因分析與解決方法全攻略


使用STM32H7的FDCAN通訊,為什么CAN1會收到CAN2的幀ID,CAN2也會收到CAN1的?
AUTOSAR通信對自動駕駛的影響 AUTOSAR通信與嵌入式系統設計
AUTOSAR通信與網絡安全 AUTOSAR通信在車輛中的應用
AUTOSAR中通信堆棧的配置 AUTOSAR通信模塊測試方法
AUTOSAR通信框架的優勢 AUTOSAR通信實例與應用場景
AUTOSAR通信與CAN協議的關系
AUTOSAR通信組件介紹 AUTOSAR通信層功能分析
AUTOSAR通信協議解析 如何實現AUTOSAR通信
CAN總線通信原理介紹 CAN總線模塊選擇指南
快速了解CAN通訊原理及應用
AUTOSAR解決方案 — INTEWORK-EAS-AP






 工商網監
工商網監
評論