") 基于YoloV5的ROS2封裝
基于YoloV5的ROS2封裝
大家好,我是禿頭了依然在敲代碼的小魚。
最近小魚又整了一個(gè)開源庫,結(jié)合YOLOV5訂閱圖像數(shù)據(jù)和相機(jī)參數(shù),直接給出一個(gè)可以給出識(shí)別物品的坐標(biāo)信息,方便進(jìn)行識(shí)別和抓取,目前適配完了2D相機(jī),下一步準(zhǔn)備適配3D相機(jī)。
開源地址:https://github.com/fishros/yolov5_ros2
YoloV5_ROS2
基于YoloV5的ROS2封裝,給定模型文件和相機(jī)參數(shù)可以直接發(fā)布三維空間位置進(jìn)行抓取操作。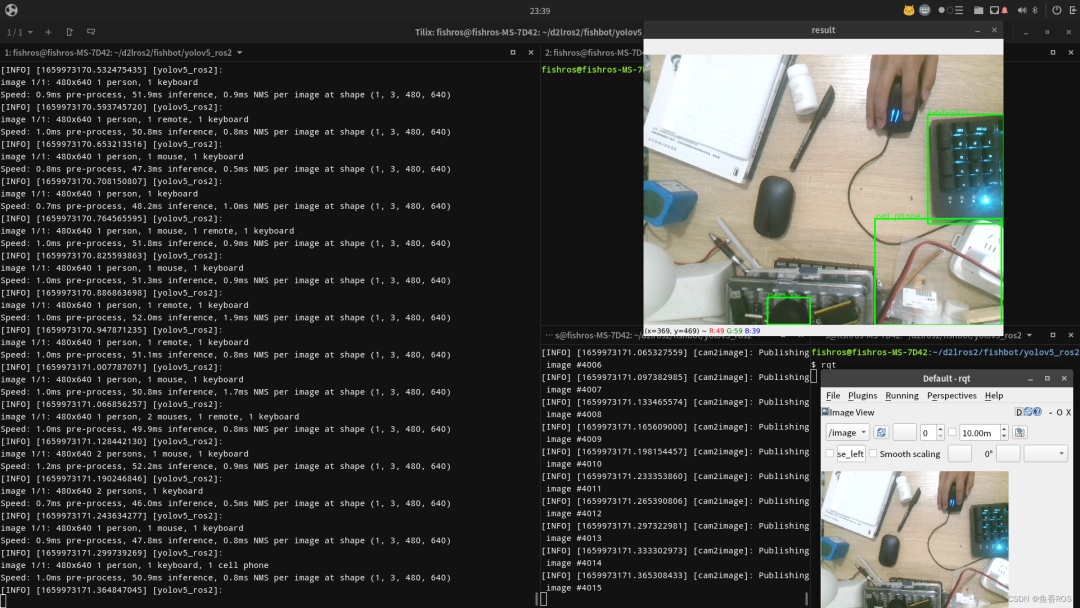
1.安裝依賴
sudo apt update
sudo apt install python3-pip ros-humble-vision-msgs
pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple yolov5
2.編譯運(yùn)行
colcon build
source install/setup.bash
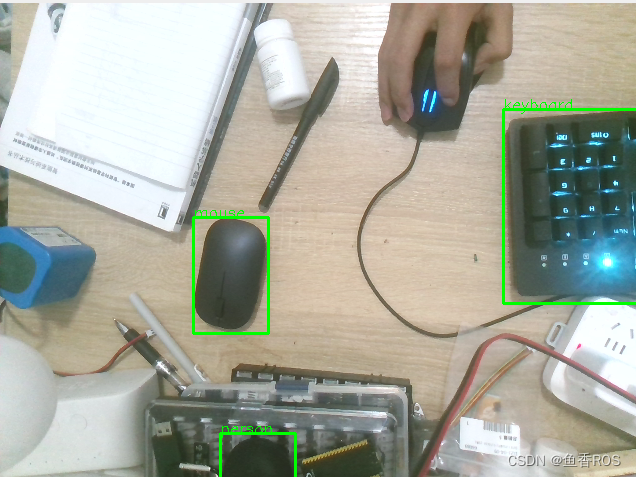
ros2 run yolov5_ros2 yolo_detect_2d --ros-args -p device:=cpu -p image_topic:=/image
使用真實(shí)相機(jī),修改默認(rèn)話題image_topic:=/image
ros2 run image_tools cam2image --ros-args -p width:=640 -p height:=480 -p frequency:=30.0 -p device_id:=-1
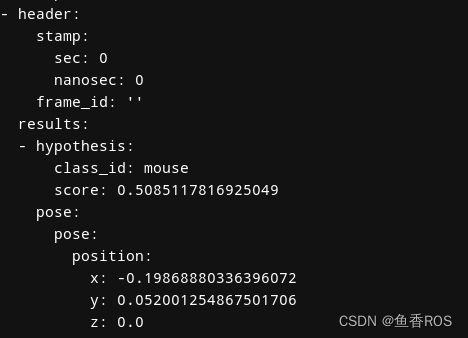
3.訂閱結(jié)果
識(shí)別結(jié)果通過/yolo_resutl話題發(fā)布出去,包含原始的像素坐標(biāo)、和歸一化后的x和y坐標(biāo)(相機(jī)坐標(biāo)系下)。
ros2 topic echo /yolo_result
審核編輯 :李倩
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
三維空間
+關(guān)注
關(guān)注
0文章
19瀏覽量
7643 -
3D相機(jī)
+關(guān)注
關(guān)注
0文章
118瀏覽量
8379
原文標(biāo)題:YoloV5_ROS2
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
RV1126 yolov8訓(xùn)練部署教程
YOLOv8 是 ultralytics 公司在 2023 年 1月 10 號(hào)開源的基于YOLOV5進(jìn)行更新的 下一個(gè)重大更新版本,目前支持圖像分類、物體檢測(cè)和實(shí)例分割任務(wù),鑒于Yolov5的良好表現(xiàn),
請(qǐng)問如何在imx8mplus上部署和運(yùn)行YOLOv5訓(xùn)練的模型?
我正在從事 imx8mplus yocto 項(xiàng)目。我已經(jīng)在自定義數(shù)據(jù)集上的 YOLOv5 上訓(xùn)練了對(duì)象檢測(cè)模型。它在 ubuntu 電腦上運(yùn)行良好。現(xiàn)在我想在我的 imx8mplus 板上運(yùn)行該模型
發(fā)表于 03-25 07:23
YOLOv5類中rgb888p_size這個(gè)參數(shù)要與模型推理和訓(xùn)練的尺寸一致嗎?一致會(huì)達(dá)到更好的效果?
YOLOv5類中rgb888p_size這個(gè)參數(shù)要與模型推理和訓(xùn)練的尺寸一致嗎,一致會(huì)達(dá)到更好的效果
發(fā)表于 03-11 08:12
yolov5轉(zhuǎn)onnx在cubeAI進(jìn)行部署,部署失敗的原因?
第一個(gè)我是轉(zhuǎn)onnx時(shí) 想把權(quán)重文件變小點(diǎn) 就用了半精度 --half,則說17版本不支持半精度 后面則是沒有縮小的單精度 但是顯示哪里溢出了···· 也不說是哪里、、。。。 到底能不能部署yolov5這種東西啊?? 也沒看見幾個(gè)部署在這上面......................
發(fā)表于 03-07 11:38
【米爾RK3576開發(fā)板評(píng)測(cè)】+項(xiàng)目名稱YOLOV5目標(biāo)檢測(cè)
/examples/yolov5/model
./download_model.sh
下載的是一個(gè)ONNX格式的神經(jīng)網(wǎng)絡(luò)模型,但發(fā)現(xiàn)它無法在瑞芯微系統(tǒng)中直接運(yùn)行。為了解決這個(gè)問題,您計(jì)劃使用特定
發(fā)表于 02-15 13:24
【ELF 2學(xué)習(xí)板試用】ELF2開發(fā)板(飛凌嵌入式)部署yolov5s的自定義模型
了v7.0的和v6.0的pt都可以)
https://github.com/ultralytics/yolov5/releases/download/v7.0/yolov5s.pt
圖2 官方模型pt
發(fā)表于 02-04 18:15
使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站
這篇文章是來自Automatic Addison的開源項(xiàng)目,已獲作者授權(quán)轉(zhuǎn)載自github。本項(xiàng)目的主要內(nèi)容是使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站。

在RK3568教學(xué)實(shí)驗(yàn)箱上實(shí)現(xiàn)基于YOLOV5的算法物體識(shí)別案例詳解
非常流行的實(shí)時(shí)目標(biāo)檢測(cè)模型,它提供了出色的性能和精度。YOLOv5可以分為三個(gè)部分,分別是:
1、主干特征提取網(wǎng)絡(luò)(Backbone)
2、加強(qiáng)特征提取網(wǎng)絡(luò)(FPN)
3、分類器與回歸器(Yolo
發(fā)表于 12-03 14:56
在樹莓派上部署YOLOv5進(jìn)行動(dòng)物目標(biāo)檢測(cè)的完整流程
目標(biāo)檢測(cè)在計(jì)算機(jī)視覺領(lǐng)域中具有重要意義。YOLOv5(You Only Look One-level)是目標(biāo)檢測(cè)算法中的一種代表性方法,以其高效性和準(zhǔn)確性備受關(guān)注,并且在各種目標(biāo)檢測(cè)任務(wù)中都表現(xiàn)出

RK3588 技術(shù)分享 | 在Android系統(tǒng)中使用NPU實(shí)現(xiàn)Yolov5分類檢測(cè)
: NPU幫助機(jī)器完成更高效的翻譯、文本分類和情感分析,推動(dòng)了自然語言處理技術(shù)的發(fā)展。
實(shí)例分享:Yolov5分類檢測(cè)
在RK3588處理器上,不僅可以基于Linux系統(tǒng)使用NPU,也可以
發(fā)表于 10-24 10:13
RK3588 技術(shù)分享 | 在Android系統(tǒng)中使用NPU實(shí)現(xiàn)Yolov5分類檢測(cè)-迅為電子
RK3588 技術(shù)分享 | 在Android系統(tǒng)中使用NPU實(shí)現(xiàn)Yolov5分類檢測(cè)-迅為電子

RK3588 技術(shù)分享 | 在Android系統(tǒng)中使用NPU實(shí)現(xiàn)Yolov5分類檢測(cè)
: NPU幫助機(jī)器完成更高效的翻譯、文本分類和情感分析,推動(dòng)了自然語言處理技術(shù)的發(fā)展。
實(shí)例分享:Yolov5分類檢測(cè)
在RK3588處理器上,不僅可以基于Linux系統(tǒng)使用NPU,也可以
發(fā)表于 08-20 11:13
基于迅為RK3588【RKNPU2項(xiàng)目實(shí)戰(zhàn)1】:YOLOV5實(shí)時(shí)目標(biāo)分類
【RKNPU2項(xiàng)目實(shí)戰(zhàn)1】:YOLOV5實(shí)時(shí)目標(biāo)分類
https://www.bilibili.com/video/BV1ZN411D7V8/?spm_id_from=333.999.0.0
發(fā)表于 08-15 10:51
YOLOv5的原理、結(jié)構(gòu)、特點(diǎn)和應(yīng)用
YOLOv5(You Only Look Once version 5)是一種基于深度學(xué)習(xí)的實(shí)時(shí)目標(biāo)檢測(cè)算法,它屬于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的范疇。下面我將詳細(xì)介紹YOLOv5的原理、結(jié)構(gòu)、特點(diǎn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論