 Isaac仿真平臺搭建以及ROS試用教程
Isaac仿真平臺搭建以及ROS試用教程
機器人有助于為制造業、物流業、醫療保健業和服務業等行業創造新效率并提升人們的生活質量, NVIDIA Isaac 憑借改進的機器人開發、模擬和部署功能,可加速這一進程。
對于機器人領域的開發者而言,“Isaac 就是 Omniverse 平臺里面,一個完全在 GPU 上實現,很好地將機器人相關的一些深度學習、強化學習、SLAM、圖像處理等等的算法,融合在一個 GEMs 的高性能軟件包中的炫酷仿真引擎。” 這是知乎大咖稚輝(知乎坐擁 130 多萬粉絲的知名 KOL、AI 工程師)對于 Isaac 的評價。本期文章我們將分享稚輝 Isaac 仿真平臺搭建以及 ROS 試用教程。
Isaac 仿真平臺搭建以及 ROS 試用教程
最近在搞一個機器人項目嘛,所以借著機會了解了一下之前 NVIDIA大力推廣的 Omniverse 平臺,Omniverse 是 NVIDIA 推出的一個元宇宙模擬平臺,而 Isaac 是其中專門用于機器人環境模擬的一個引擎,試了一下還挺有意思的。
其實最早 Omniverse 設計的初衷是提供一個能讓工程師們協作創作的虛擬工具,畢竟號稱元宇宙引擎嘛,在數字世界里做基建必然是一個需要大量不同場景的工程師們配合實現的工作,后來該項目逐漸演變成了一個更加宏大的全行業框架。
發布會上提到會通過一種 USD(Universal Scene Description,這個縮寫我直呼內行)的基礎數據格式來打通各種不同的軟件之間的配合。USD 不僅僅只是導入和導出的一種格式而已, USD 之于 Omniverse 就像 HTML(一種標記語言,可以將網絡上的文檔格式統一)之于網站。
而 Isaac 就是 Omniverse 平臺里面,一個完全在 GPU 上實現,很好地將機器人相關的一些深度學習、強化學習、SLAM、圖像處理等等的算法,融合在一個 GEMs 的高性能軟件包中的炫酷仿真引擎。之前做機器人仿真的時候,最常用的是 VREP(現在叫 CoppeliaSim 了)、ROS 里面的 Gazebo、WeBot 等,這些仿真器用到的主要物理引擎都是開源的 Bullet 和 ODE。
與上面提到的這些仿真器相比,Isaac 的優勢在于:
-
超逼真的光照渲染效果:一個字,以假亂真。NVIDIA 做啥起家的大家都知道了,RTX ON 之后這渲染效果相比于前面提到的開源引擎有質的飛躍,直接來到照片級的逼真度。
-
性能的提升:實時的光照渲染和物理引擎的算力需求都是很高的,Isaac 針對 NVIDIA 硬件(GPU)進行了優化,可以生成高效的平臺優化的交叉編譯應用程序。
-
生態支持度好:Isaac 集成了其中許多 CUDA 加速的開源庫,例如 NPP、OpenCV、ROS、PCL (wip)、Eigen 等。
-
自帶常用的算法庫:Isaac SDK 附帶了一系列高性能算法,這些算法被稱為 GEM,此外除了機器人控制類的算法,Issac 還為主業打游戲副業煉丹的同學們準備了深度神經網絡模塊的集成,例如立體聲深度估計、目標檢測、 Tracking 算法等等。
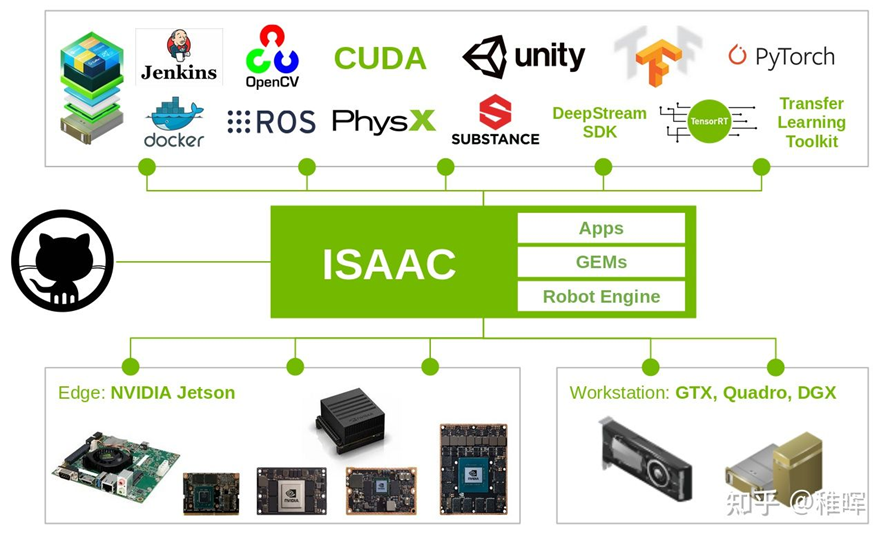
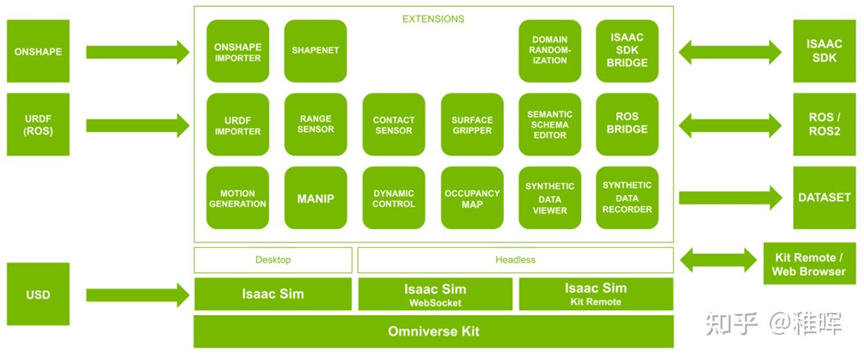
當然了對我這種顏值狗來說,渲染效果美麗 + Modern UI 的軟件界面就足夠讓我對其他軟件 Say No 了。下圖展示了 Isaac 的生態系統:
那么接下來本文簡單介紹一下 Issac 的安裝流程以及使用記錄。
準備的環境
使用的是我自己的臺式機,硬件配置如下:
|
項目 |
概述 |
|
OS |
Ubuntu 20.04 LTS |
|
kernel |
5.13.0-35-generic |
|
英特爾 i7-12700F |
|
|
MEM |
64GB |
|
GPU |
GeForce RTX 3080 |
|
Driver Ver |
470.103.01 |
|
CUDA Ver |
11.4 |
按照 NVIDIA 官方 Omniverse 安裝指南(鏈接如下):
https://docs.omniverse.nvidia.com/prod_install-guide/prod_install-guide/workstation.html
首先,下載 Omniverse 的啟動器程序(需要注冊一下,鏈接如下):https://www.nvidia.com/en-us/omniverse/
操作系統可以選擇 Windows 或 Linux,這里我用的是 Ubuntu 所以選 Linux 版本,可以得到名為 omniverse-launcher-linux.AppImage 的文件,下載好之后需要授予它執行權限,并將其放在主頁目錄下,命令:
chmod+xomniverse-launcher-linux.AppImage./omniverse-launcher-linux.AppImage
運行此啟動器程序將啟動 Omniverse 窗口,但需要 NVIDIA 帳戶登錄才能使用,沒有的話注冊一下就行個人使用是免費的。
首次啟動時,系統會提示是否要安裝名為 “Cache” 的軟件,這個是用于提供一種軟件緩存機制,用于管理網絡通信加載內容的,建議安裝它。
啟動器的軟件界面
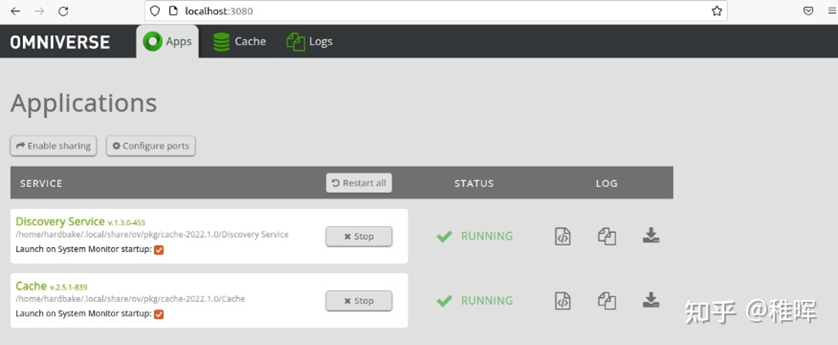
順便說一下,Omniverse會開啟一個后臺服務,你可以從瀏覽器訪問 http://localhost:3080 來打開后臺管理頁面查看每個服務的操作狀態。
然后需要在啟動器軟件中安裝 Nucleus 服務:

Nucleus 就是個數據服務器,用于連接其他軟件,同時在當多個人進行項目時,通過連接到此服務器進行協作開發。軟件中也有很多有意思的 Tutorial 可以自己嘗試學習:
安裝完成后用之前注冊的賬號登錄即可,登錄后將看到一個文件管理器,可以在其中管理項目內容。
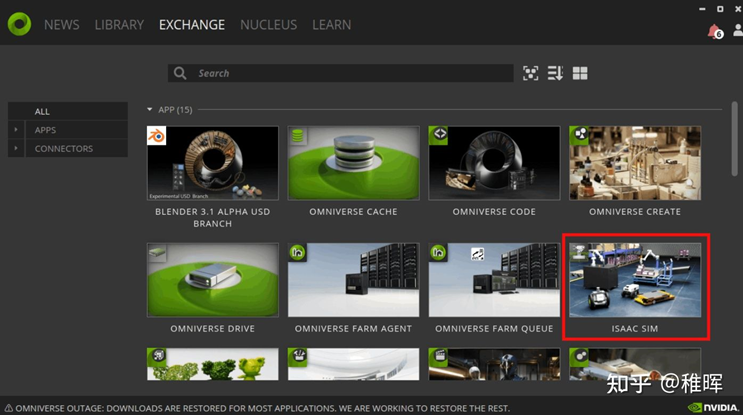
接下來,我們添加機器人模擬器環境 Isaac Sim。Isaac Sim 是一個機器人仿真工具包,在 Omniverse 上運行,Isaac Sim 具有構建虛擬機器人世界和實驗的基本功能,還能通過渲染能力提供進行數據集合成的工具和工作流程。Isaac Sim 通過 ROS/ROS2 支持導航和操作應用程序。
Isaac 的架構圖如下:
由于渲染能力過猛,Isaac 對于硬件的配置要求有一丟丟高,推薦的配置為- RTX2070 及以上的顯卡,內存至少 32GB,NVIDIA 的驅動程序版本需要 470.57.02 或更高版本。
參考以下安裝指南安裝 Isaac Sim:
https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/install_basic.html#isaac-sim-app-install-basic
從 EXCHANGE 選項卡中選擇并安裝:
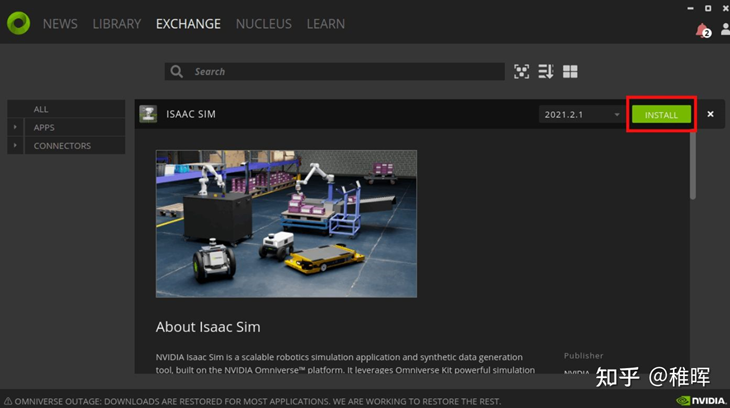
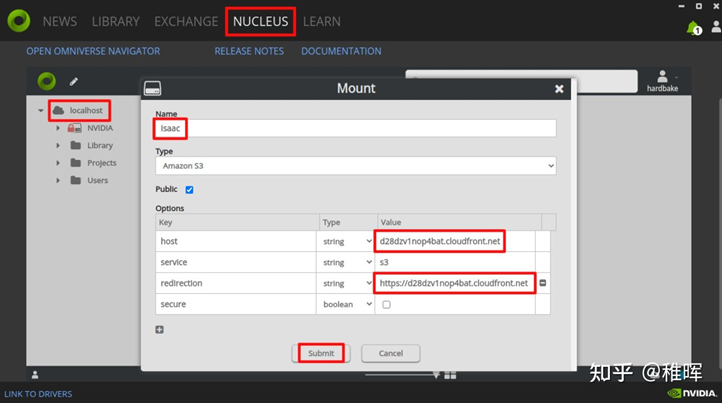
根據教程,Isaac Sim 應該有一個按鈕來下載 Isaac Sim Assets(示例數據等)后啟動,但可能是網絡問題我這邊無法下載,所以通過手動添加方式解決,參考:
https://forums.developer.nvidia.com/t/known-issue-error-checking-isaac-sim-assets/204522
具體解決方案是從主窗口的 mount 選項卡右鍵單擊導航器的 localhost,創建具有以下參數的文件夾:
|
項目 |
內容 |
|
Name |
Isaac |
|
Type |
Amazon S3 |
|
Host |
http://d28dzv1nop4bat.cloudfront.net |
|
Service |
s3 |
|
Redirection |
https://d28dzv1nop4bat.cloudfront.net |
下面的命令安裝:
sudoaptinstall./code_1.51.1-1605051630_amd64.debsudoaptinstall-yapt-transport-httpssudoaptupdate
然后我們安裝一下 VS Code 來代替自帶的編輯器,在官網下載 deb 安裝包
https://code.visualstudio.com/Download
此外,從 Isaac Sim 打開 VSCode 時的配置文件(如 setting.json)使用的是 .vscode,該文件位于 Isaac Sim 的安裝根目錄~/.local/share/ov/pkg/isaac_simxxx 中。
安裝 ROS 和 ROS2
在 Ubuntu 上安裝要與配合的 ROS 和 ROS2,只需按照官方安裝指南進行安裝即可:https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/install_ros.html
然后,在 Isaac Sim 端啟用 ROS Bridge 擴展,在窗口狀態量菜單中 Window->Extensions 中搜索 “ROS”:
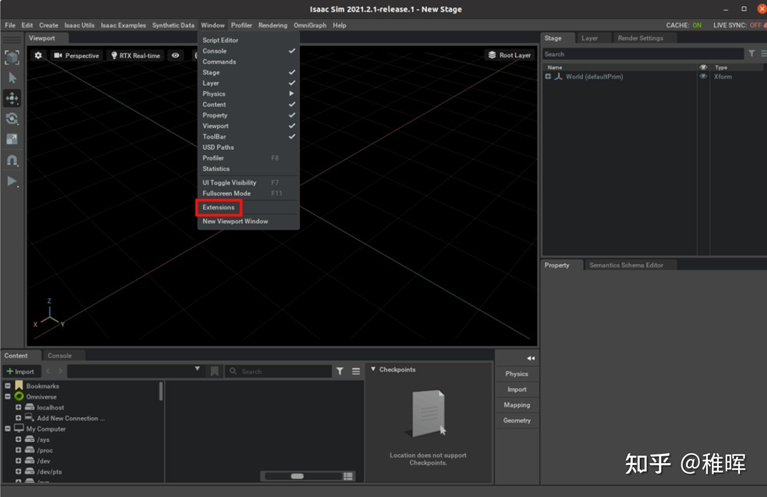
啟用 “ROS Bridge” 和 “ROS UI” :
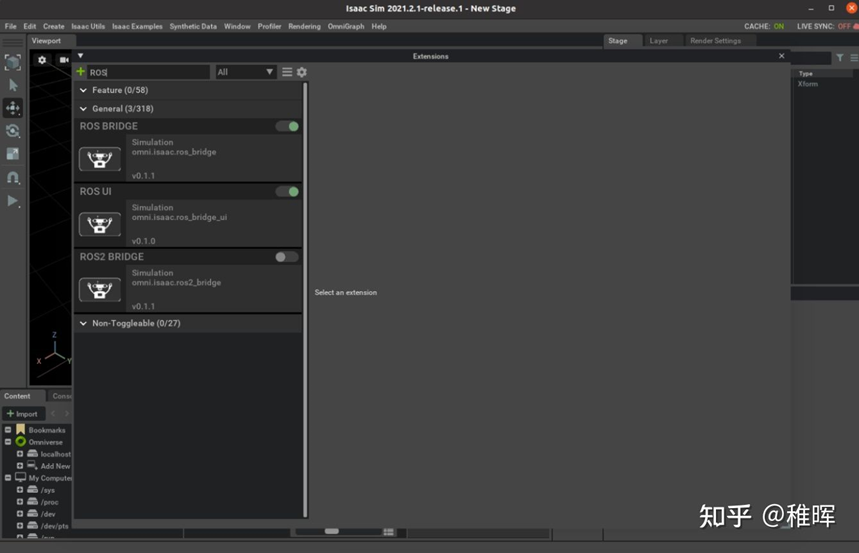
如果使用 ROS2,那就啟用 ROS2 Bridge 而不是 ROS Bridge。
現在 ROS 就可以和 Isaac Sim 通信啦,接下來我們編寫一個簡單的程序進行測試。
Python代碼測試
Isaac Sim 可以從官方自帶的一些 python 腳本獨立啟動,啟動腳本位于 Omniverse 中的 Isaac Sim 目錄中,例如,啟動作為示例提供的名為 “franka” 的制造機器人演示的命令如下所示:
cd~/.local/share/ov/pkg/isaac_sim-2021.2.1./python.shstandalone_examples/api/omni.isaac.franka/follow_target.py
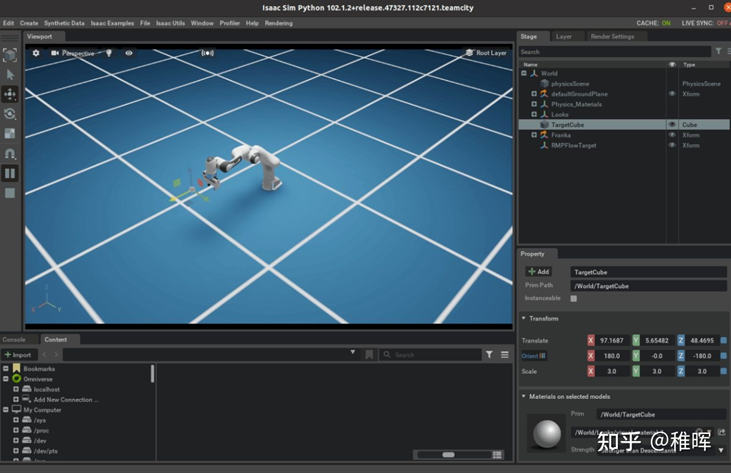
打開的時間可能比較久需要有點耐心...
當然還有其他很多別的腳本可以供參考,接下來我們將自己編寫 Python 腳本實現以下內容:
1、在場景中放置對象
2、在場景中放置一個機器人并用鍵盤控制運動
放置對象
我們可以使用 omni.isaac.core 對象模塊放置對象,包含以下函數:
-
DynamicCuboid
-
DynamicCapsule
-
DynamicCone
-
DynamicCylinder
-
DynamicSphere
-
VisualCuboid
-
VisualCapsule
-
VisualCone
-
VisualCylinder
-
VisualSphere
-
FixedCuboid
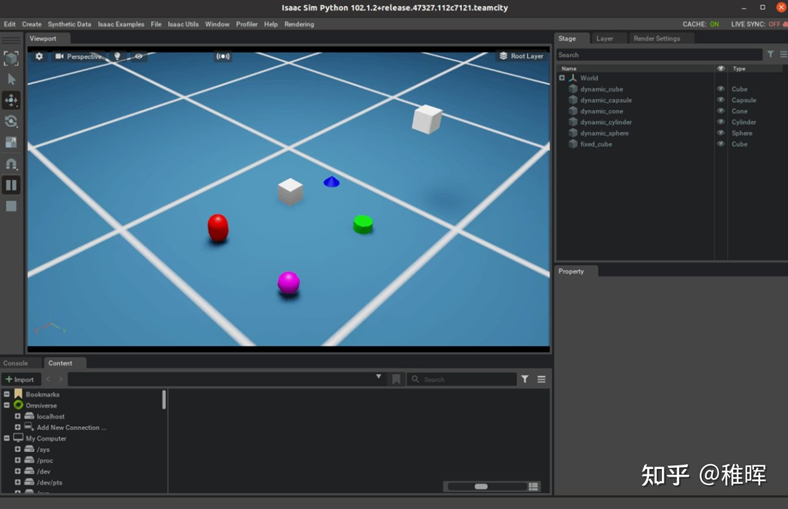
這些函數允許我們在場景中放置立方體、膠囊、圓錐體、圓柱體和球體,Dynamic 開頭的對象受到物理引擎的作用,比如重力,當把它們放置在空中時,它會直接掉落。Visual 開頭的對象則只會用于外觀,不會受到力的作用,也不會進行碰撞檢測,因此其他對象可以直接穿過它。例如以下代碼:
from omni.isaac.kit import SimulationAppimport numpy as npsimulation_app = SimulationApp({"headless": False})from omni.isaac.core import Worldfrom omni.isaac.core.objects import DynamicCuboid, DynamicCapsule, DynamicConefrom omni.isaac.core.objects import DynamicCylinder, DynamicSphere, FixedCuboidmy_world = World(stage_units_in_meters=0.01)d_cube = my_world.scene.add(DynamicCuboid(prim_path="/dynamic_cube",name="dynamic_cube",position=np.array([0, 0, 0.5]) * 100,size=np.array([0.1, 0.1, 0.1]) * 100,color=np.array([255, 255, 255]),))d_cap = my_world.scene.add(DynamicCapsule(prim_path="/dynamic_capsule",name="dynamic_capsule",position=np.array([0.5, 0, 0.5]) * 100,radius=0.05 * 100,height=0.05 * 100,color=np.array([255, 0, 0]),))d_cone = my_world.scene.add(DynamicCone(prim_path="/dynamic_cone",name="dynamic_cone",position=np.array([-0.5, 0, 0.5]) * 100,radius=0.05 * 100,height=0.05 * 100,color=np.array([0, 0, 255]),))d_cyl = my_world.scene.add(DynamicCylinder(prim_path="/dynamic_cylinder",name="dynamic_cylinder",position=np.array([0, 0.5, 0.5]) * 100,radius=0.05 * 100,height=0.05 * 100,color=np.array([0, 255, 0]),))d_sph = my_world.scene.add(DynamicSphere(prim_path="/dynamic_sphere",name="dynamic_sphere",position=np.array([0.5, 0.5, 0.5]) * 100,radius=0.05 * 100,color=np.array([255, 0, 255]),))f_cube = my_world.scene.add(FixedCuboid(prim_path="/fixed_cube",name="fixed_cube",position=np.array([-0.5, 0.5, 0.5]) * 100,size=np.array([0.1, 0.1, 0.1]) * 100,color=np.array([255, 255, 255]),))my_world.scene.add_default_ground_plane()my_world.reset()while simulation_app.is_running():=True)simulation_app.close()
效果是這樣的:
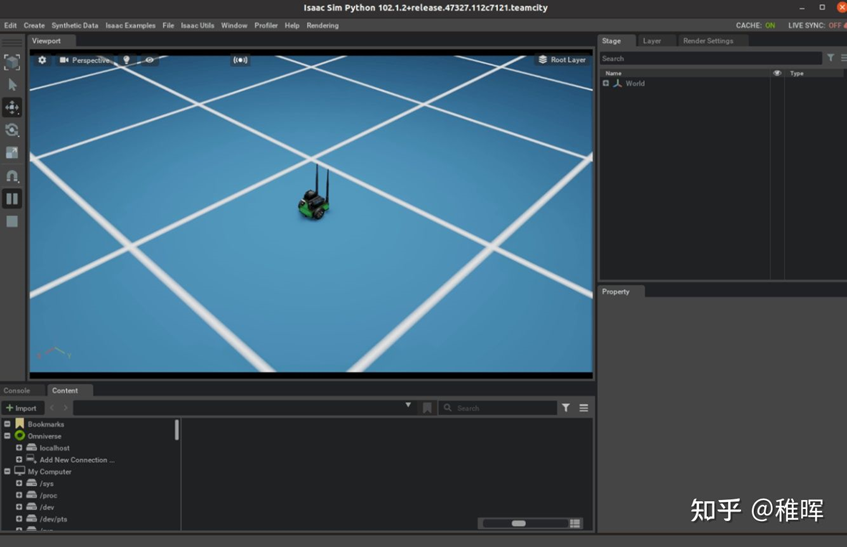
稍微修改一下,加入一些互動,比如用鍵盤控制一個小車:
from omni.isaac.kit import SimulationAppimport numpy as npimport carbimport omni.appwindowsimulation_app = SimulationApp({"headless": False})from omni.isaac.jetbot import Jetbotfrom omni.isaac.jetbot.controllers import DifferentialControllerfrom omni.isaac.core import Worldmy_world = World(stage_units_in_meters=0.01)my_jetbot = my_world.scene.add(Jetbot(prim_path="/World/Jetbot",name="my_jetbot",position=np.array([0, 0.0, 2.0])))my_controller = DifferentialController(name="simple_control")my_world.scene.add_default_ground_plane()command_ = [0.0, 0.0]def sub_keyboard_event(event, *args, **kwargs):"""Handle keyboard eventsw,s,a,d as arrow keys for jetbot movementArgs:event (int): keyboard event type"""global command_if(event.type == carb.input.KeyboardEventType.KEY_PRESSor event.type == carb.input.KeyboardEventType.KEY_REPEAT):if event.input == carb.input.KeyboardInput.W:command_ = [20, 0.0]if event.input == carb.input.KeyboardInput.S:command_ = [-20, 0.0]if event.input == carb.input.KeyboardInput.A:command_ = [0.0, np.pi / 5]if event.input == carb.input.KeyboardInput.D:command_ = [0.0, -np.pi / 5]if(event.type == carb.input.KeyboardEventType.KEY_RELEASE):command_ = [0.0, 0.0]return Trueappwindow_ = omni.appwindow.get_default_app_window()input_ = carb.input.acquire_input_interface()keyboard_ = appwindow_.get_keyboard()sub_keyboard_ = input_.subscribe_to_keyboard_events(keyboard_,sub_keyboard_event)my_world.reset()while simulation_app.is_running():my_world.step(render=True)if my_world.is_playing():my_jetbot.apply_wheel_actions(my_controller.forward(command=command_))simulation_app.close()
效果如下,用鍵盤的 WASD 可以控制小車運動:
更多的 API 可以參考官方的文檔,后續再補充更多內容。
審核編輯 :李倩
-
仿真
+關注
關注
51文章
4234瀏覽量
135288 -
ROS
+關注
關注
1文章
284瀏覽量
17549 -
深度學習
+關注
關注
73文章
5554瀏覽量
122461
原文標題:Isaac “家族” 揭秘 | 知乎大咖深度解讀系列(1)
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達企業解決方案】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
NVIDIA Isaac Sim與NVIDIA Isaac Lab的更新
盤點#機器人開發平臺
電力電子教學新范式:EasyGo半實物仿真平臺賦能高校創新實踐

NVIDIA Isaac 是英偉達推出的綜合性機器人開發平臺
英偉達GTC2025亮點:NVIDIA與GE醫療合作 引入物理AI推進自主診斷成像開發
芯來科技攜手芯芒科技發布RISC-V CPU系統仿真平臺
智元機器人基于NVIDIA Isaac GR00T打造高效仿真數據采集方案

名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
簡述NVIDIA Isaac的重要更新

使用myCobot 280機械臂結合ROS2系統搭建機械分揀站






 工商網監
工商網監
評論