") Python實現(xiàn)所有算法:力系統(tǒng)是否靜態(tài)平衡
Python實現(xiàn)所有算法:力系統(tǒng)是否靜態(tài)平衡
昨天第二篇文章寫的有點匆忙了,有一些地方配圖配錯了,這里做個更正。
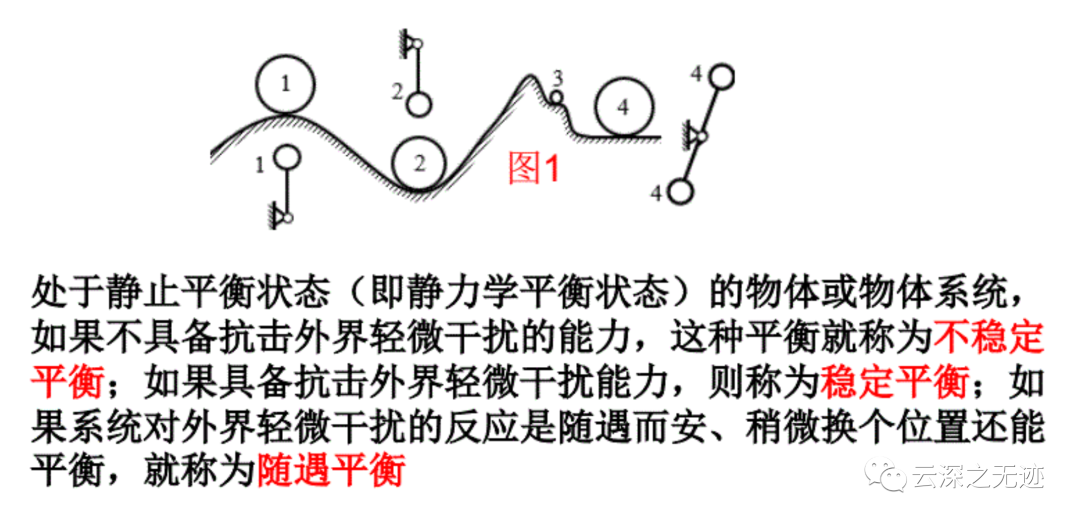
關(guān)于靜力學(xué)平衡,就回憶一下這個圖就好
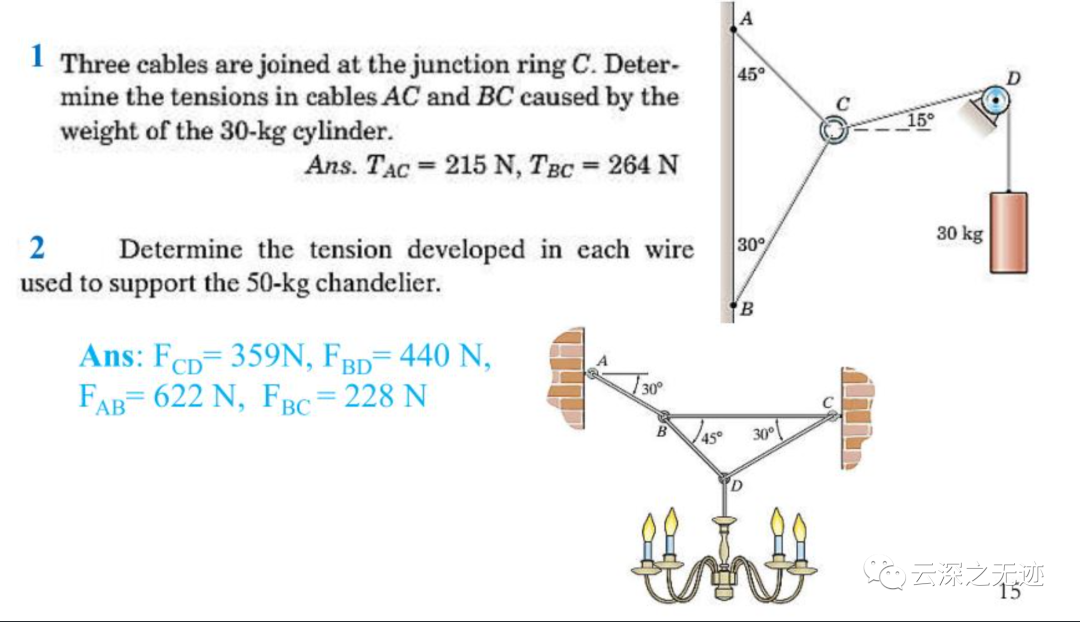
程序第一個給的例題是這個,我配錯了圖,對不起了

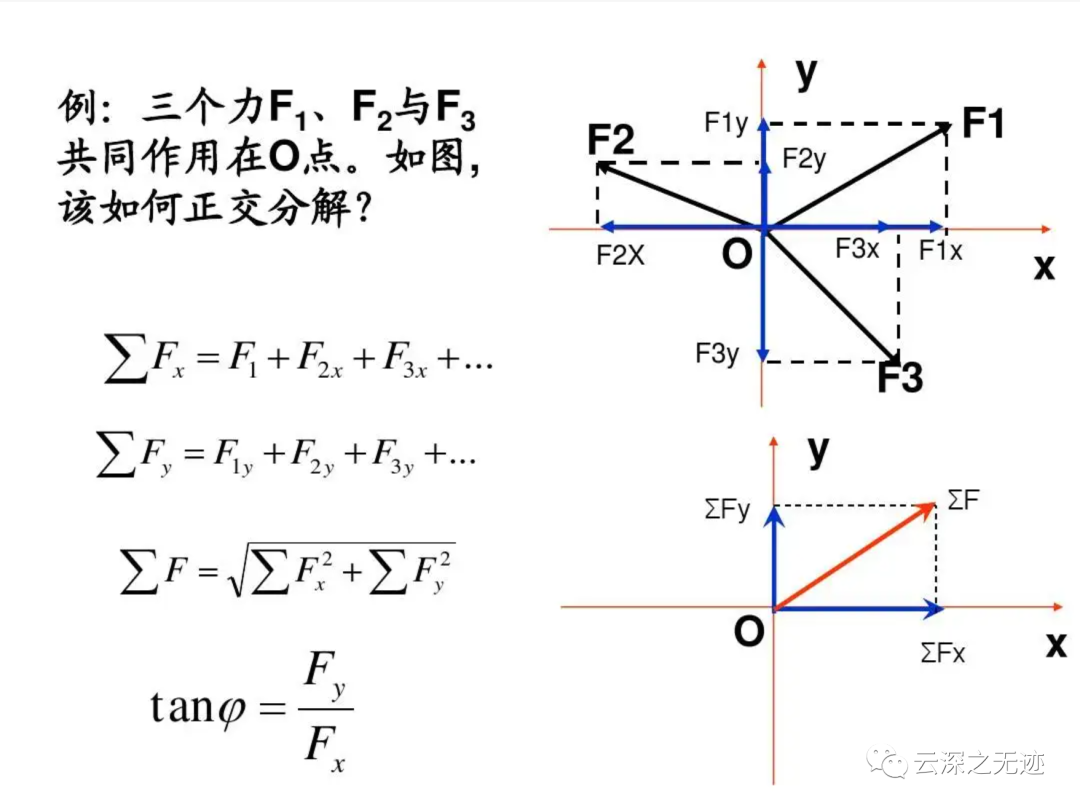
?解析沿矩形分量的力
(force, angle) => (force_x, force_y),這個就是最終的結(jié)果。
因為提起角度就有兩個不同的記法,這里也做了一個角度的兼容。

Core就是一個正交分解

弧度制
我們這個圖就很完美了
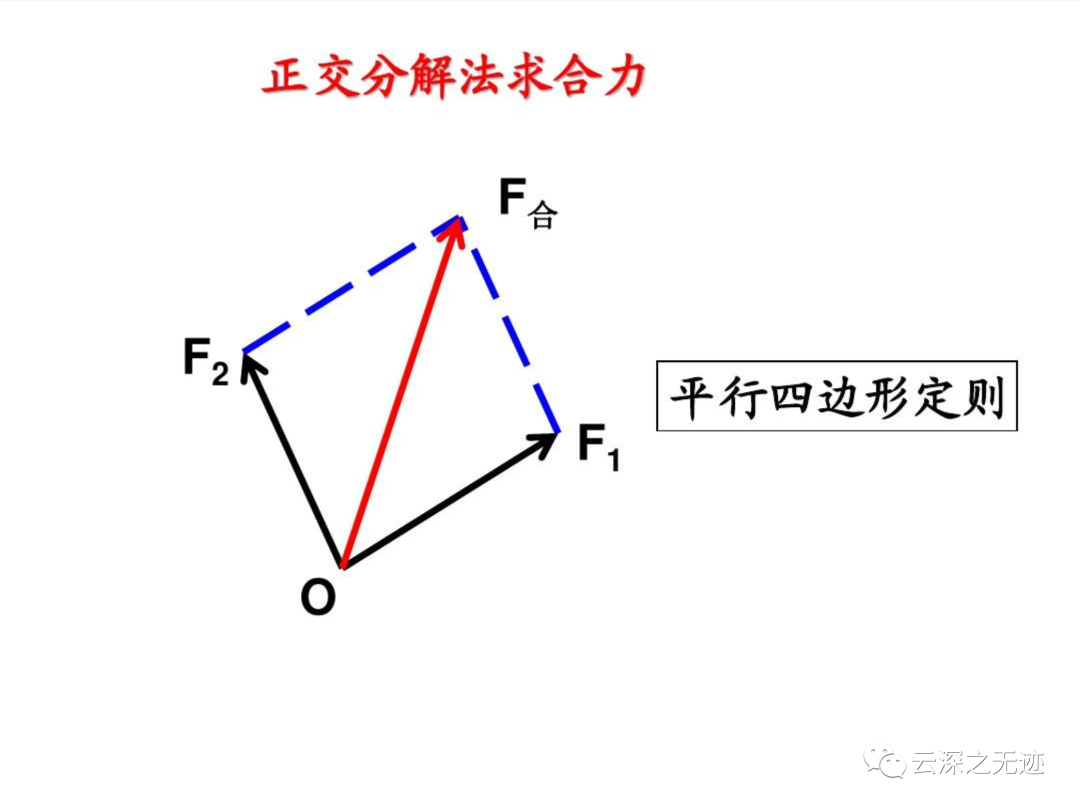
還有一個是比較泛化的正交分解
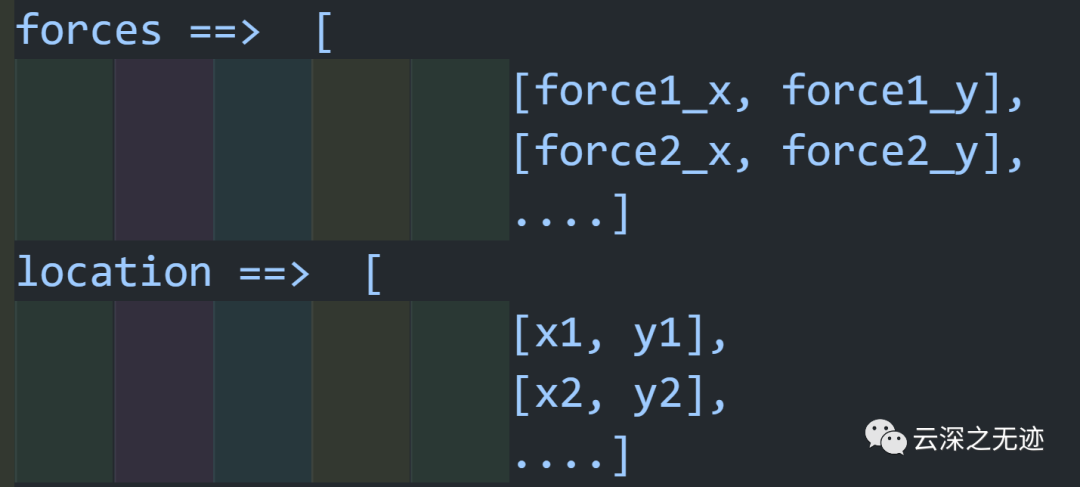
在函數(shù)的參數(shù)構(gòu)建中,分力,位置
in_static_equilibrium(force, location)
最后就會給出結(jié)果
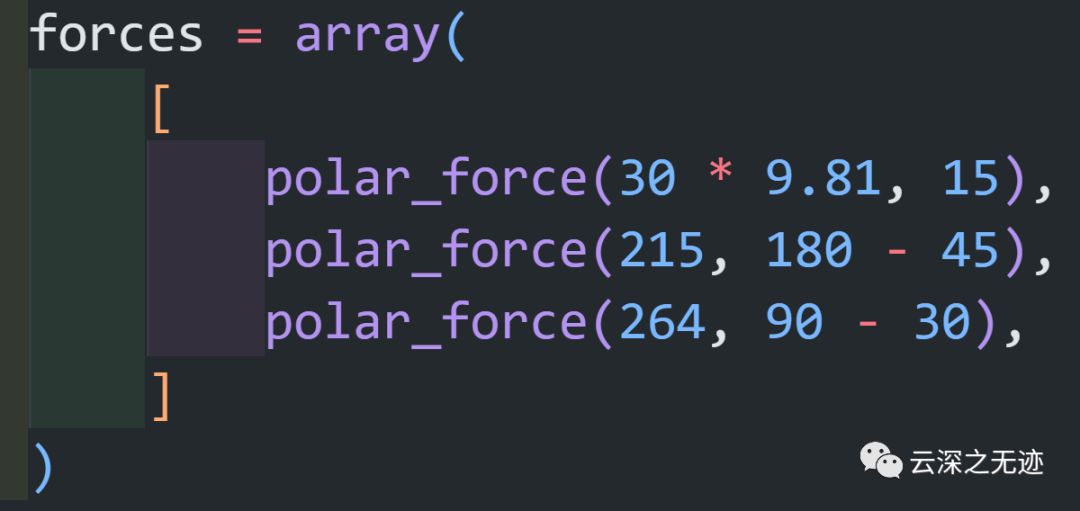
對于例題,這就是我們的分力,三組
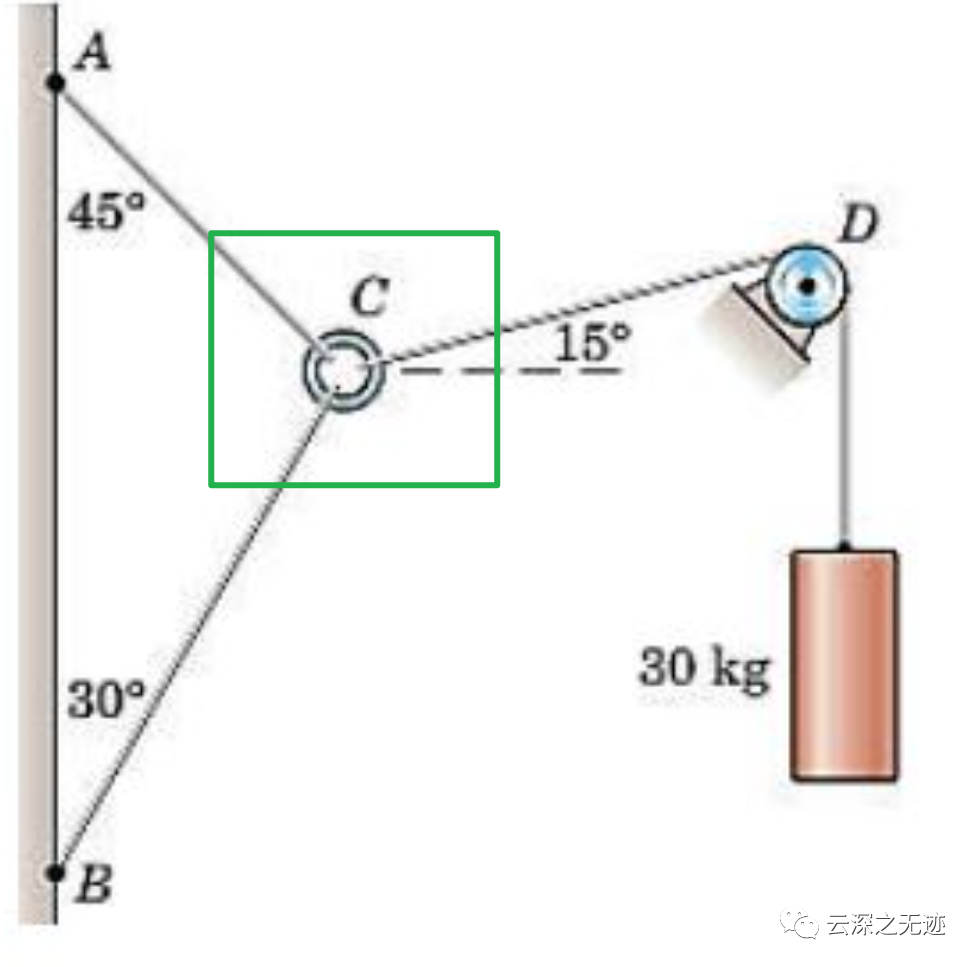
三個點在原點處的平衡情況
location = array([[0, 0], [0, 0], [0, 0]])assertin_static_equilibrium(forces,location)
這樣調(diào)用就好
對于這個,因為角度特殊,所以力直接給出

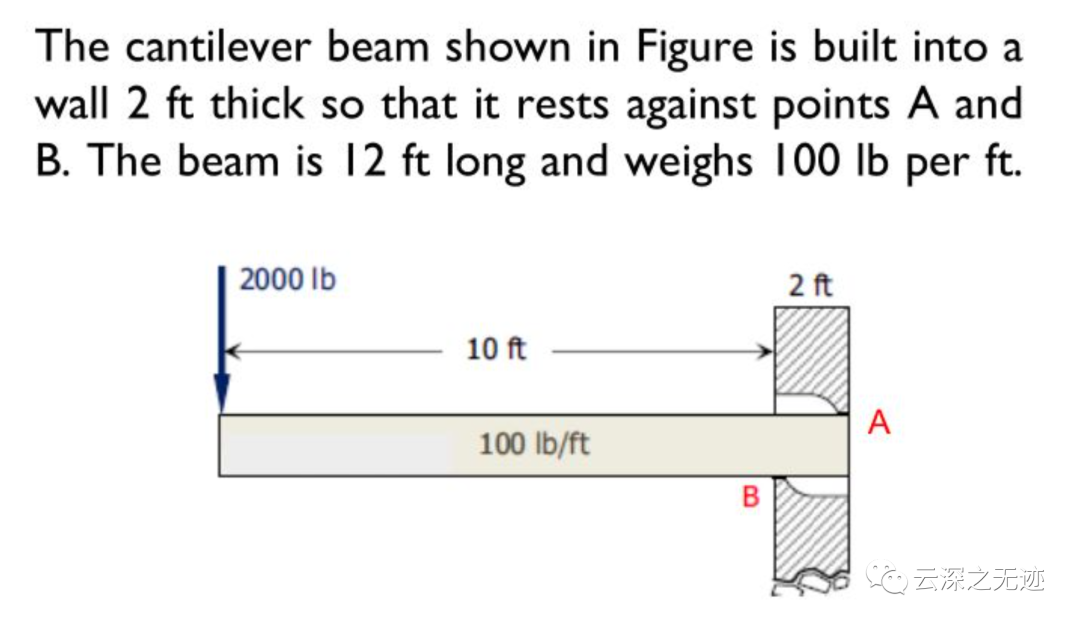
四力,四點
import mathforce = polar_force(10, 45)math.isclose(force[0], 7.071067811865477)Truemath.isclose(force[1], 7.0710678118654755)Truepolar_force(10, 3.14, radian_mode=True)[-9.999987317275396,0.01592652916486828]
在Python數(shù)學(xué)模塊中,math.isclose()方法用于確定兩個浮點數(shù)的值是否接近。要使用此函數(shù),你必須導(dǎo)入數(shù)學(xué)模塊。
用法:isclose(a, b, rel_tol = 1e-09, abs_tol 0.0)
參數(shù):rel_tol:被視為“close”的最大差,相對于輸入值的大小
abs_tol:“close”的最大差異,與輸入值的大小無關(guān)

cross是叉積
numpy.cross
numpy.cross(a,b,axisa=-1,axisb=-1,axisc=-1,axis=None)
返回兩個(數(shù)組)向量的叉積。
a和b 的叉積是垂直于a和b的向量。如果a和b是向量的數(shù)組,則默認(rèn)情況下,向量由a和b的最后一個軸定義,并且這些軸的尺寸可以為2或3。其中a或b的尺寸為2時,則第三個分量假定輸入向量為零,并據(jù)此計算叉積。如果兩個輸入向量的尺寸均為2,則返回叉積的z分量。

參數(shù)表
叉積來了哈~
向量積,數(shù)學(xué)中又稱外積、叉積,物理中稱矢積、叉乘,是一種在向量空間中向量的二元運算。與點積不同,它的運算結(jié)果是一個向量而不是一個標(biāo)量。并且兩個向量的叉積與這兩個向量和垂直。
a x b就是a叉b(廢話???)有時也用^這個符號。
向量積可以被定義為:
模長:(在這里θ表示兩向量之間的夾角(共起點的前提下)(0°≤θ≤180°),它位于這兩個矢量所定義的平面上.)
就像這樣
方向:a向量與b向量的向量積的方向與這兩個向量所在平面垂直,且遵守右手定則。(一個簡單的確定滿足“右手定則”的結(jié)果向量的方向的方法是這樣的:若坐標(biāo)系是滿足右手定則的,當(dāng)右手的四指從a以不超過180度的轉(zhuǎn)角轉(zhuǎn)向b時,豎起的大拇指指向是c的方向。)
也可以這樣定義(等效):
向量積|c|=|a×b|=|a||b|sin
即c的長度在數(shù)值上等于以a,b,夾角為θ組成的平行四邊形的面積。
而c的方向垂直于a與b所決定的平面,c的指向按右手定則從a轉(zhuǎn)向b來確定。
平時見到的各種積:
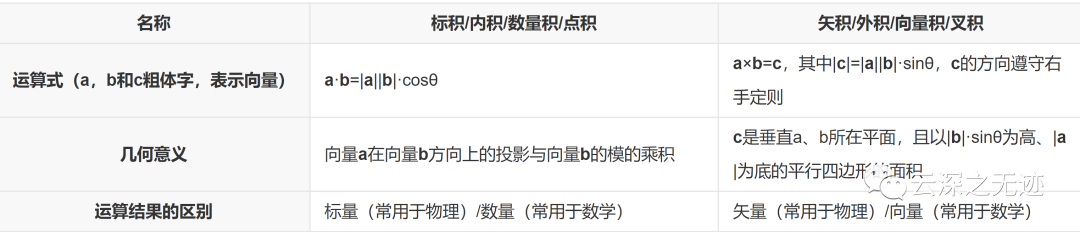
這里可以簡單的總結(jié)一下
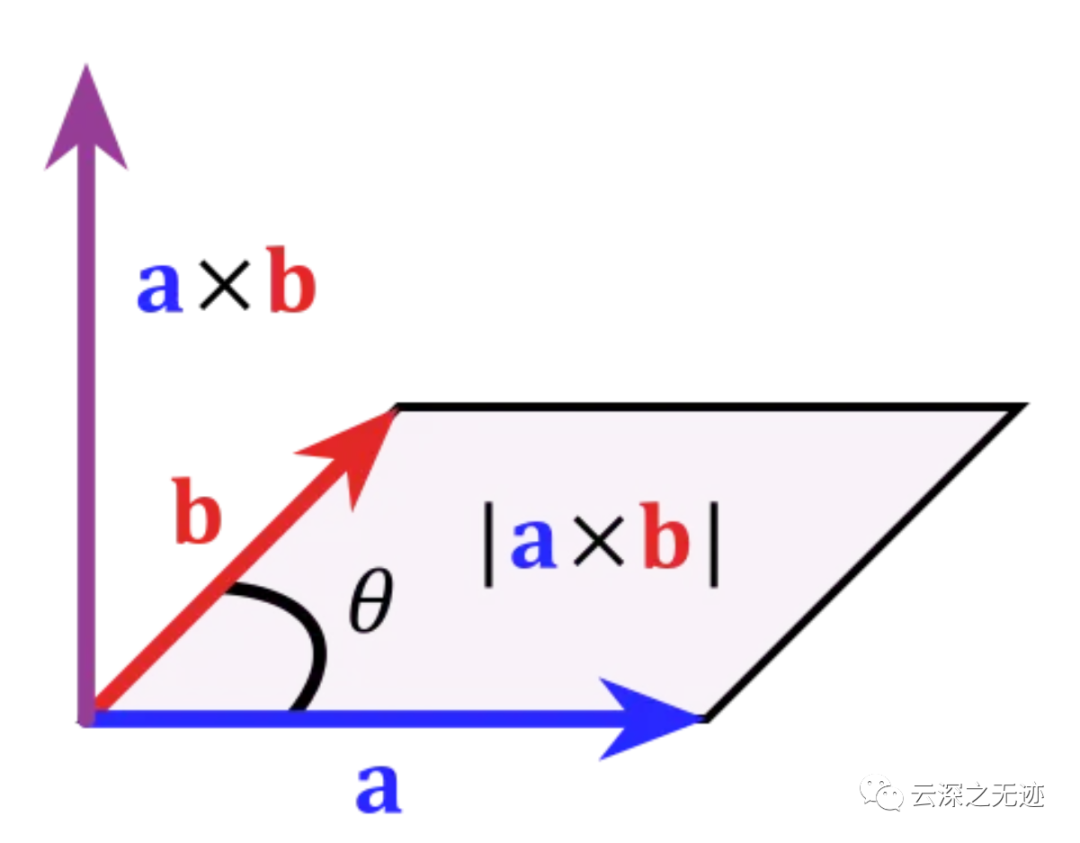
對于這樣的東西,一個好的可視化解釋,可以讓你記憶猶新:
叉積的長度|a×b|可以解釋成這兩個叉乘向量a,b共起點時,所構(gòu)成平行四邊形的面積。據(jù)此有:混合積[abc]=(a×b)·c可以得到以a,b,c為棱的平行六面體的體積。
在數(shù)學(xué)里面,我們給定一種運算法則后會試圖將它融入到現(xiàn)有的數(shù)學(xué)體系。所以這里給出代數(shù)規(guī)則:
1、反交換律:a×b=-b×a
2、加法的分配律:a×(b+c)=a×b+a×c。
3、與標(biāo)量乘法兼容:(ra)×b=a×(rb)=r(a×b)。
4、不滿足結(jié)合律,但滿足雅可比恒等式:a×(b×c)+b×(c×a)+c×(a×b)=0。
5、分配律,線性性和雅可比恒等式別表明:具有向量加法和叉積的R3構(gòu)成了一個李代數(shù)。
6、兩個非零向量a和b平行,當(dāng)且僅當(dāng)a×b=0。
是不是混進(jìn)來一個雅可比???
雅可比恒等式是橢圓函數(shù)理論中的一個著名恒等式。雅可比恒等式就是下列等式:
[]]+[Y,[Z,X]]+[Z,[X,Y]]=0
滿足雅可比恒等式的代數(shù)結(jié)構(gòu)不一定滿足反交換律。
上面的橢圓理論什么的是復(fù)變函數(shù)里面的,我只是一個土狗,不知道怎么說。
OKOK,叉積又不得不提拉格朗日公式:
(a×b)×c=b(a·c)-a(b·c)a×(b×c)=b(a·c)-c(a·b)
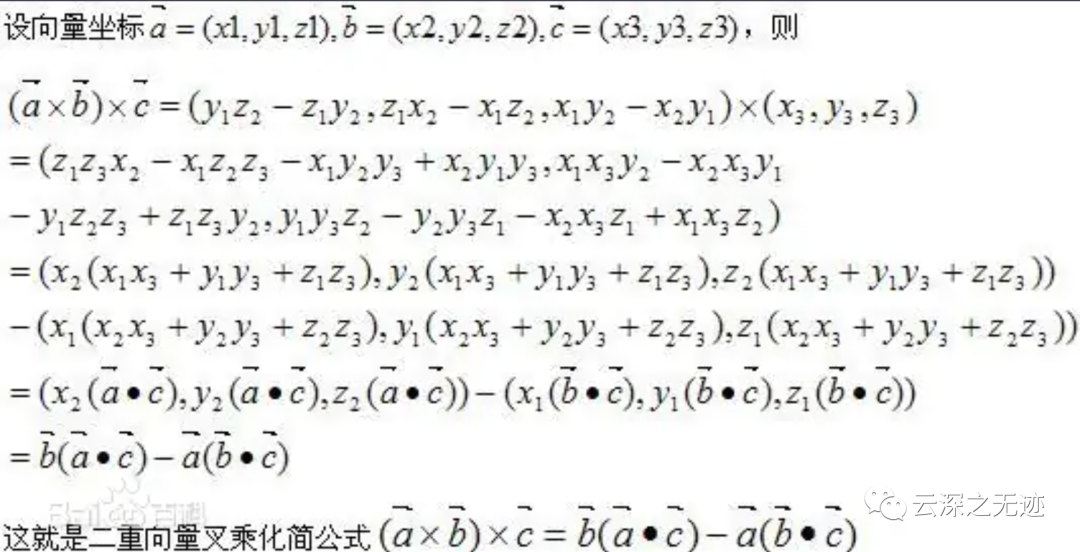
證明過程
可以簡單地記成“BAC-CAB”。這個公式在物理上簡化向量運算非常有效。等等???你是不是不知道上面說的是什么。
他叫:二重向量叉乘化簡公式。
說了這么多的字,可能沒有一張圖來的快
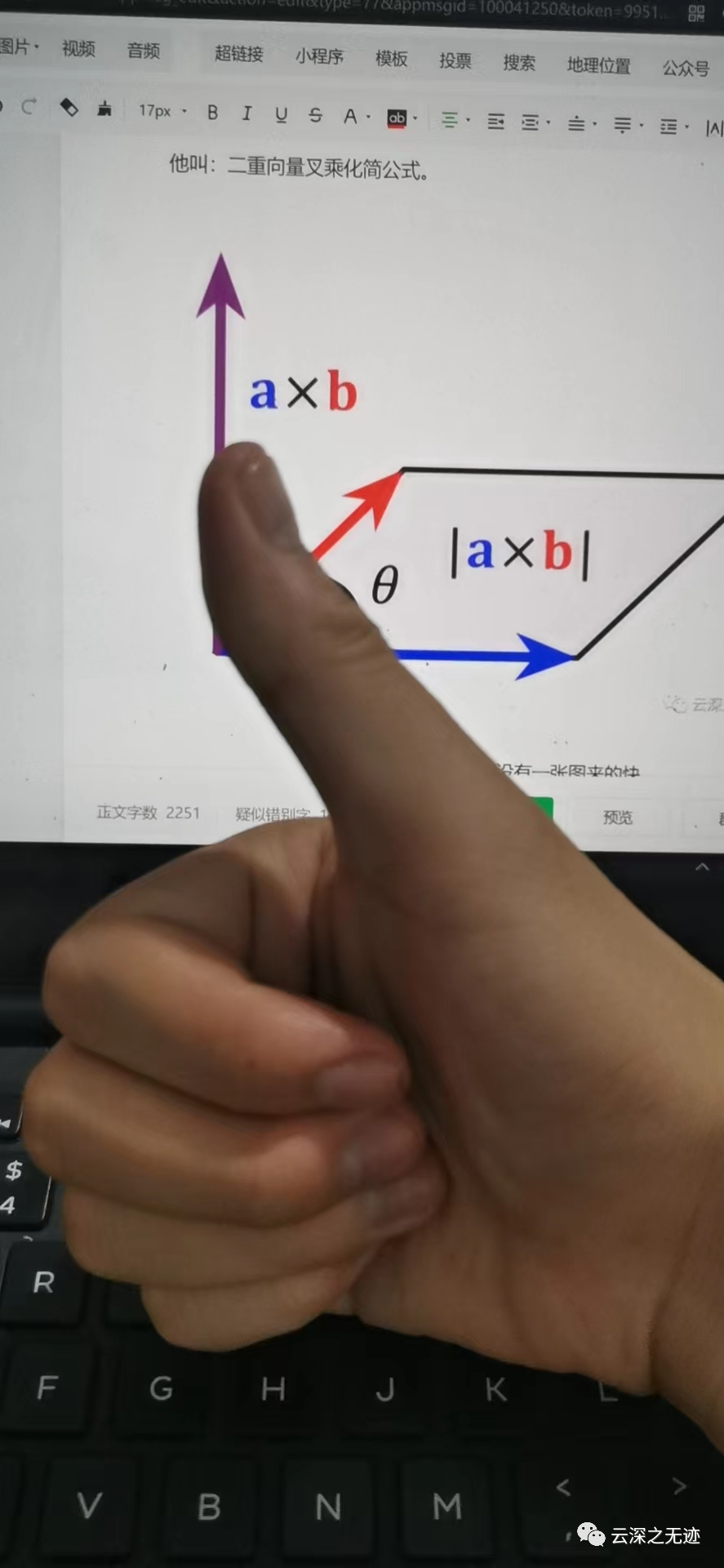
哥倆好?不是~是叉積的方向啦!
伸出右手,將大拇指指向a,將食指指向b,中指自然彎曲,并使中指同時垂直于食指和拇指,那么此時中指所指的方向就是a×b的方向。
從這個右手定則,我們可以發(fā)現(xiàn),兩個向量的叉積同時垂直這兩個向量,并且:
a×b=-b×a
也就是確確實實的不支持交換律。
不過既然物理這么多了,也不怕再多點:
在力的作用線的延長線或反向延長線經(jīng)過原點時,力矩為零。力矩在物理學(xué)里是指作用力使物體繞著轉(zhuǎn)動軸或支點轉(zhuǎn)動的趨向。力矩的單位是牛頓米。力矩的概念,起源于阿基米德對杠桿的研究。轉(zhuǎn)動力矩又稱為轉(zhuǎn)矩或扭矩。力矩能夠使物體改變其旋轉(zhuǎn)運動。推擠或拖拉涉及到作用力 ,而扭轉(zhuǎn)則涉及到力矩。力矩等于徑向矢量與作用力的叉積。
為什么說力矩,因為最后有叉積。

這是我們的判斷是否處于平衡狀態(tài)

因為要叉積計算,注意兩個向量的個數(shù)
這里也注意內(nèi)在,位置是矢量,分力也是矢量,所以可以計算。求完以后將值sum然后小于一個小數(shù),證明平衡。
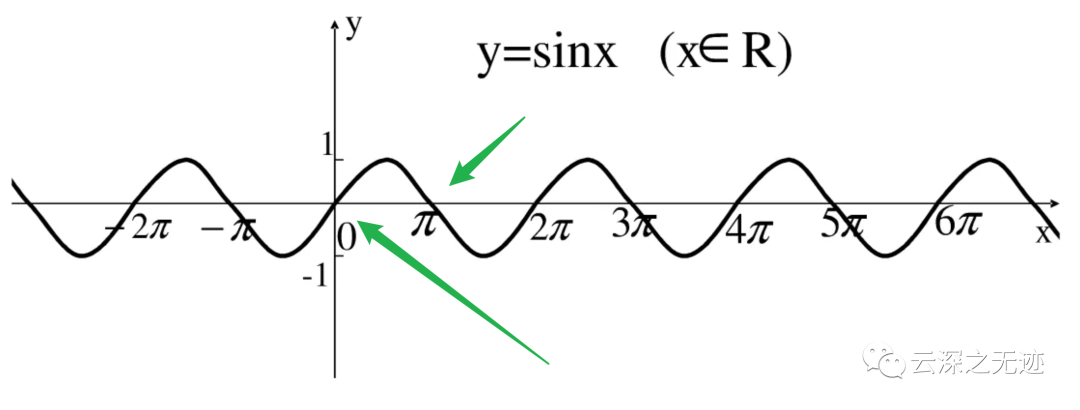
這里簡單的分析一下:
叉乘的模,等于兩個向量的模的乘積乘以sinθ。θ是兩個向量的夾角,如果兩個向量的模不為0,那么sinθ要等于0,也就是夾角是0°或者180°,那么兩個向量平行。
就是這些位置
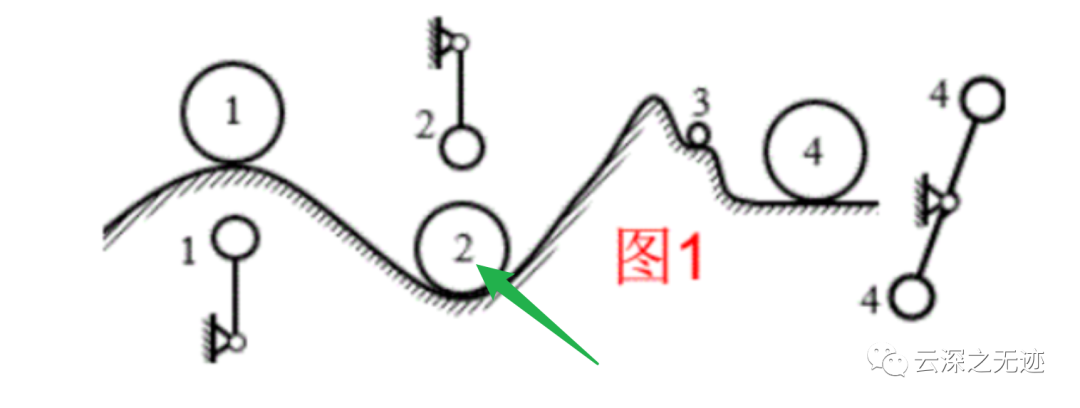
我們再分析,2是最穩(wěn)定的狀態(tài),那么它的分力和原點叉積和越小越穩(wěn)定
這篇文章有點長了,感激你看到這里,叉積會算了嗎?靚仔
-
模塊
+關(guān)注
關(guān)注
7文章
2783瀏覽量
49608 -
算法
+關(guān)注
關(guān)注
23文章
4699瀏覽量
94758 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4371瀏覽量
64210
原文標(biāo)題:Python實現(xiàn)所有算法-力系統(tǒng)是否靜態(tài)平衡(補篇)
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
負(fù)載箱在電力系統(tǒng)測試中的應(yīng)用與優(yōu)勢
平衡電阻器可以改為不平衡嗎
使用Python實現(xiàn)xgboost教程
電力系統(tǒng)中的電功率調(diào)度方法
如何使用Python實現(xiàn)PID控制
請問TLV320AIC3256 mini DSP是否能實現(xiàn)降噪算法?
平衡閥正確安裝使用方法介紹

微機(jī)保護(hù),電力系統(tǒng)的智慧守護(hù)者






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論