") 3D目標(biāo)檢測(cè)中多模態(tài)融合方法的綜述
3D目標(biāo)檢測(cè)中多模態(tài)融合方法的綜述
導(dǎo)讀
本文是一篇關(guān)于3D目標(biāo)檢測(cè)中多模態(tài)融合方法的綜述,總結(jié)了多模態(tài)融合的難點(diǎn)和現(xiàn)有研究中的一些方法。
0 前言
本篇文章主要想對(duì)目前處于探索階段的3D目標(biāo)檢測(cè)中多模態(tài)融合的方法做一個(gè)簡(jiǎn)單的綜述,主要內(nèi)容為對(duì)目前幾篇研究工作的總結(jié)和對(duì)這個(gè)研究方面的一些思考。 在前面的一些文章中,筆者已經(jīng)介紹到了多模態(tài)融合的含義是將多種傳感器數(shù)據(jù)融合。在3D目標(biāo)檢測(cè)中,目前大都是將lidar和image信息做融合。在上一篇文章中,筆者介紹到了目前主要的幾種融合方法,即early-fusion,deep-fusion和late-fusion,并介紹了一種基于Late-fusion的融合方法。但是在大多數(shù)研究工作中,都是以deep-fuion的方法為主要的融合策略。
1 背景知識(shí)
1.1 多模態(tài)融合的主要難點(diǎn)
難點(diǎn)一:傳感器視角問(wèn)題
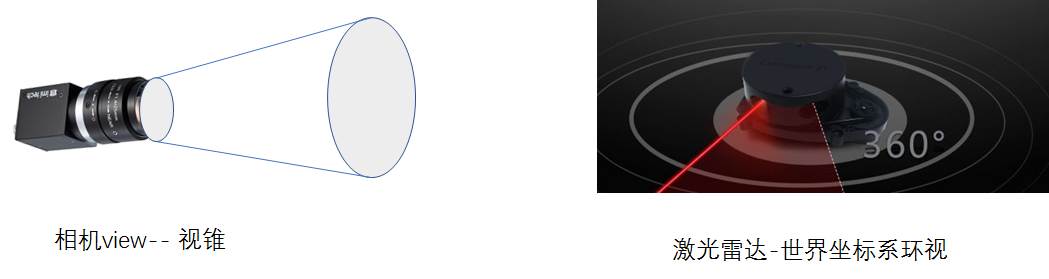
3D-CVF(ECCV20)的研究提出的做fusion的對(duì)做融合工作最大的問(wèn)題即是在視角上的問(wèn)題,描述為如下圖所示的問(wèn)題,camera獲取到的信息是“小孔成像”原理,是從一個(gè)視錐出發(fā)獲取到的信息,而lidar是在真實(shí)的3D世界中獲取到的信息。這使得在對(duì)同一個(gè)object的表征上存在很大的不同。
難點(diǎn)二 數(shù)據(jù)表征不一樣
這個(gè)難點(diǎn)也是所用多模態(tài)融合都會(huì)遇到的問(wèn)題,對(duì)于image信息是dense和規(guī)則的,但是對(duì)于點(diǎn)云的信息則是稀疏的、無(wú)序的。所以在特征層或者輸入層做特征融合會(huì)由于domain的不同而導(dǎo)致融合定位困難。
難點(diǎn)三 信息融合的難度
從理論上講,圖像信息是dense和規(guī)則的,包含了豐富的色彩信息和紋理信息,但是缺點(diǎn)就是由于為二維信息。存在因?yàn)檫h(yuǎn)近而存在的sacle問(wèn)題。相對(duì)圖像而言,點(diǎn)云的表達(dá)為稀疏的,不規(guī)則的這也就使得采用傳統(tǒng)的CNN感知在點(diǎn)云上直接處理是不可行的。但是點(diǎn)云包含了三維的幾何結(jié)構(gòu)和深度信息,這是對(duì)3D目標(biāo)檢測(cè)更有利的,因此二者信息是存在理論上的互補(bǔ)的。此外目前二維圖像檢測(cè)中,深度學(xué)習(xí)方法都是以CNN為基礎(chǔ)設(shè)計(jì)的方法,而在點(diǎn)云目標(biāo)檢測(cè)中則有著MLP、CNN,GCN等多種基礎(chǔ)結(jié)構(gòu)設(shè)計(jì)的網(wǎng)絡(luò),在融合過(guò)程中和哪一種網(wǎng)絡(luò)做融合也是比較需要研究的。
1.2 點(diǎn)云和imgae融合的紐帶
既然做多模態(tài)特征融合,那么圖像信息和點(diǎn)云信息之間必然需要聯(lián)系才能做對(duì)應(yīng)的融合。就在特征層或者輸入層而言,這種聯(lián)系都來(lái)自于一個(gè)認(rèn)知,即是:對(duì)于激光雷達(dá)或者是相機(jī)而言,對(duì)同一個(gè)物體在同一時(shí)刻的掃描都是對(duì)這個(gè)物體此時(shí)的一種表征,唯一不同的是表征形式,而融合這些信息的紐帶就是絕對(duì)坐標(biāo),也就是說(shuō)盡管相機(jī)和激光雷達(dá)所處的世界坐標(biāo)系下的坐標(biāo)不一樣,但是他們?cè)谕粫r(shí)刻對(duì)同一物體的掃描都僅僅是在傳感器坐標(biāo)系下的掃描,因此只需要知道激光雷達(dá)和相機(jī)之間的位置變換矩陣,也就可以輕松的得到得到兩個(gè)傳感器的坐標(biāo)系之間的坐標(biāo)轉(zhuǎn)換,這樣對(duì)于被掃描的物體,也就可以通過(guò)其在兩個(gè)傳感器下的坐標(biāo)作為特征聯(lián)系的紐帶。 但是,就聯(lián)系的紐帶而言,由于在做特征提取過(guò)程中可能存在feature-map或者domain的大小的改變,所以最原始坐標(biāo)也會(huì)發(fā)生一定的改變,這也是需要研究的問(wèn)題。
2目前存在的一些融合方法
如果硬要把目前存在的融合方法做一個(gè)劃分的話,那么筆者從early-fuion,deep-fusion和late-fusion三個(gè)層面對(duì)最近的文章做一些簡(jiǎn)單介紹。這里把early-fusion和deep-fusion當(dāng)做同一類融合方法介紹,late-fusion當(dāng)做另外一種融合策略介紹。
2.1 early-fusian & deep-fusion
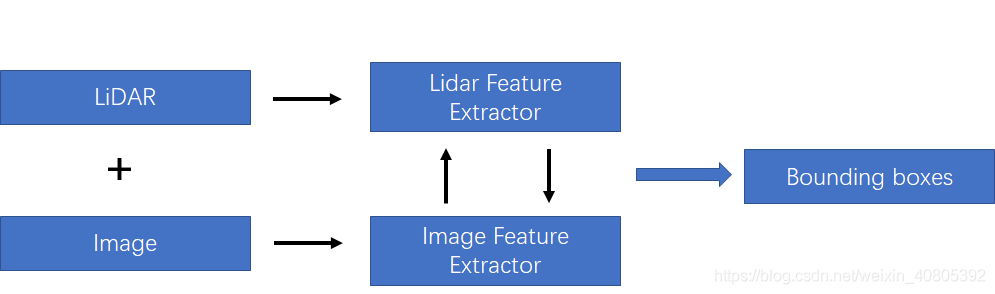
在上一篇文章中,筆者也提及到這種融合方法如下圖所示。在后面,筆者將這兩種方法都統(tǒng)稱為特征融合方法,將late-fusion成為決策融合方法。如下圖所示的融合方法,該融合需要在特征層中做一定的交互。主要的融合方式是對(duì)lidar 和image分支都各自采用特征提取器,對(duì)圖像分支和lidar分支的網(wǎng)絡(luò)在前饋的層次中逐語(yǔ)義級(jí)別融合,做到multi-scale信息的語(yǔ)義融合。
為了方便分析,在該種融合策略下,筆者按照對(duì)lidar-3D-detection的分類方法分為point-based的多模態(tài)特征融合和voxel-based的多模態(tài)特征融合。其差別也就是lidar-backbone是基于voxel還是基于point的。就筆者的理解是,基于voxel的方法可以利用強(qiáng)大的voxel-based的backbone(在文章TPAMI20的文章Part-A^2中有研究過(guò)point-based方法和voxel-based的方法最大的區(qū)別在于CNN和MLP的感知能力上,CNN優(yōu)于MLP)。但是如果采用voxel-backbone的方法就會(huì)需要考慮點(diǎn)到圖像的映射關(guān)系的改變,因?yàn)榛趐oint的方法采用原始的點(diǎn)云坐標(biāo)做為特征載體,但是基于voxel的方法采用voxel中心作為CNN感知特征載體,而voxel中心與原始圖像的索引相對(duì)原始點(diǎn)云對(duì)圖像的坐標(biāo)索引還是存在偏差的。
1)基于voxel-based的多模態(tài)特征融合
3D-CVF: Generating Joint Camera and LiDAR Features Using Cross-View Spatial Feature Fusion for 3D Object Detection.文章鏈接: https://arxiv.org/pdf/2004.12636 這篇發(fā)表在ECCV20的多模態(tài)融合的文章網(wǎng)絡(luò)結(jié)構(gòu)圖如下所示,該特征融合階段為對(duì)特征進(jìn)行融合,同時(shí)對(duì)于點(diǎn)云的backbone采用voxel-based的方法對(duì)點(diǎn)云做特征提取。所以這里需要解決的核心問(wèn)題除了考慮怎么做特征的融合還需要考慮voxel-center作為特征載體和原始點(diǎn)云坐標(biāo)存在一定的偏差,而如果將圖像信息索引到存在偏差的voxel中心坐標(biāo)上,是本文解決的另外一個(gè)問(wèn)題。
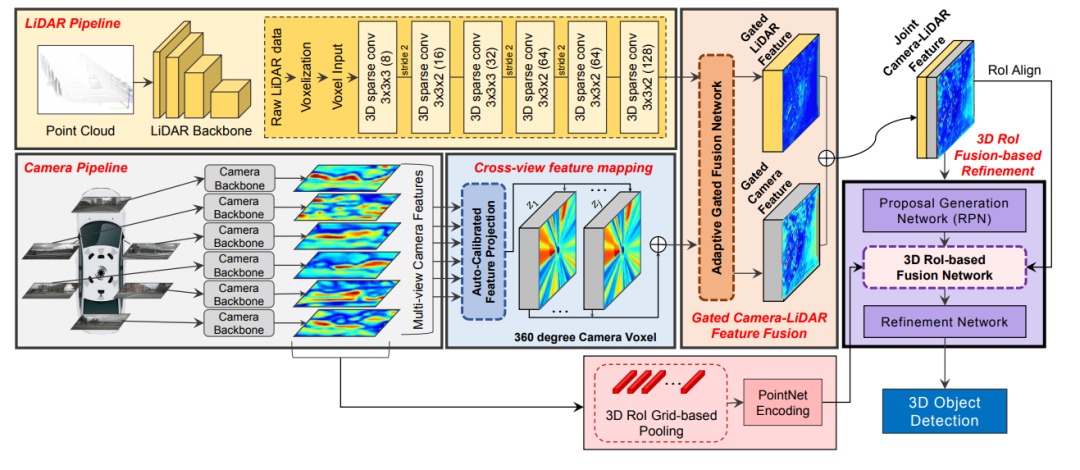
3D-CVF特征融合方法
3D-CVF 將camera的pixel轉(zhuǎn)化到點(diǎn)云的BEV視圖上(voxel-feature-map)時(shí),轉(zhuǎn)化的大小是lidar-voxel-feature-map的x-y各自的兩倍大小,也就是說(shuō)整體的voxel個(gè)數(shù)是Lidar的四倍,即會(huì)包含比較多的細(xì)節(jié)信息。 以下表示的Auto-Calibrated Projection Method的設(shè)計(jì)方案,前面提到的是該結(jié)構(gòu)是將image轉(zhuǎn)化到bev上的網(wǎng)絡(luò)結(jié)構(gòu),具體的做法是: (1)投影得到一個(gè)camera-plane,該plane是圖像特征到bev視角的voxel-dense的表達(dá)。 (2)將lidar劃分的voxel中心投影到camera-plane上(帶有一個(gè)偏移量,不一定是坐標(biāo)網(wǎng)格正中心) (3)采用近鄰插值,將最近的4個(gè)pixel的image特征插值個(gè)lidar-voxel。插值的方式采用的是距離為權(quán)重的插值方法。
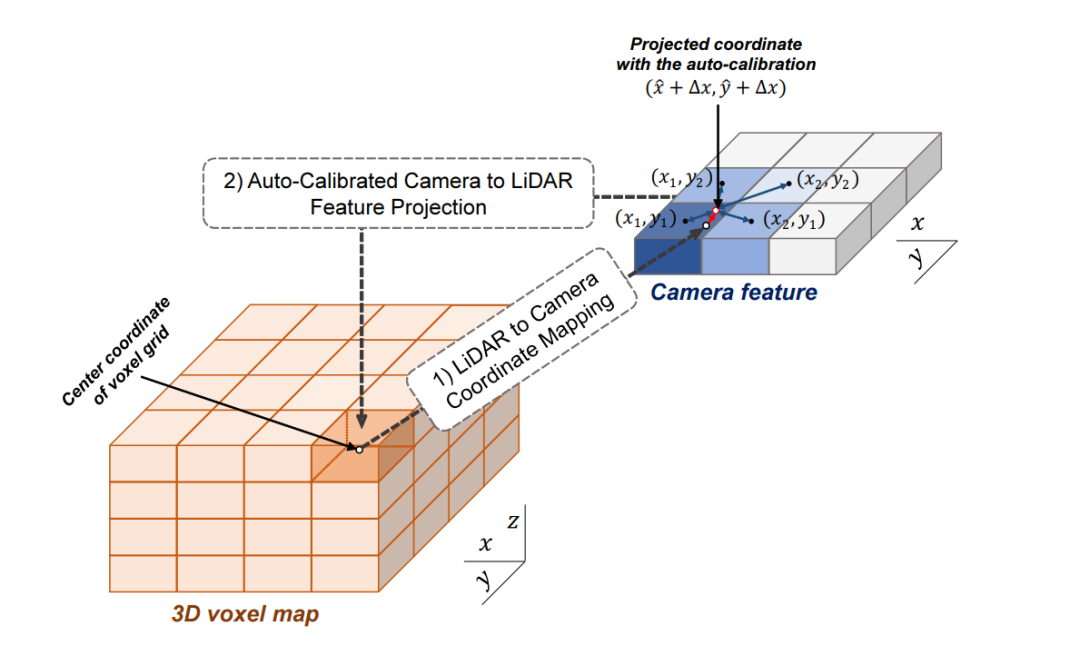
這樣,作者就得到了了image信息的feature-map在lidar-voxel上的表示,值得提到的是前面說(shuō)的偏移值是為了更好的使camera和lidar對(duì)齊。這里的第二步也就是為了解決上面提到的做標(biāo)偏差的問(wèn)題。
如下圖所示,
2)基于point-based的多模態(tài)融合方法
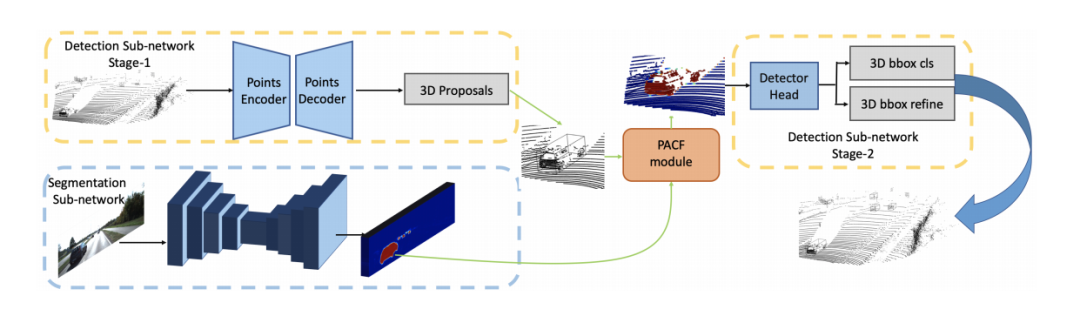
由于point-based的方法在特征提取過(guò)程也是基于原始點(diǎn)為載體(encoder-decoder的結(jié)構(gòu)會(huì)點(diǎn)數(shù)先減少再增加但是點(diǎn)是從原始點(diǎn)中采樣得到,對(duì)于GCN的結(jié)構(gòu)則是點(diǎn)數(shù)不改變),所以在做特征融合時(shí),可以直接利用前面提到的轉(zhuǎn)化矩陣的索引在絕對(duì)坐標(biāo)系上做特征融合,所以目前基本也都是基于point的方法比較好融合,研究工作也多一些。PI-RCNN: An Efficient Multi-sensor 3D Object Detector with Point-based Attentive Cont-conv Fusion Module.文章鏈接: https://arxiv.org/pdf/1911.06084 發(fā)表在AAAI20,point分支和image分支分別做3D目標(biāo)檢測(cè)任務(wù)和語(yǔ)義分割任務(wù),然后將圖像語(yǔ)義分割的特征通過(guò)索引加到proposals的內(nèi)部的點(diǎn)云上做二次優(yōu)化。
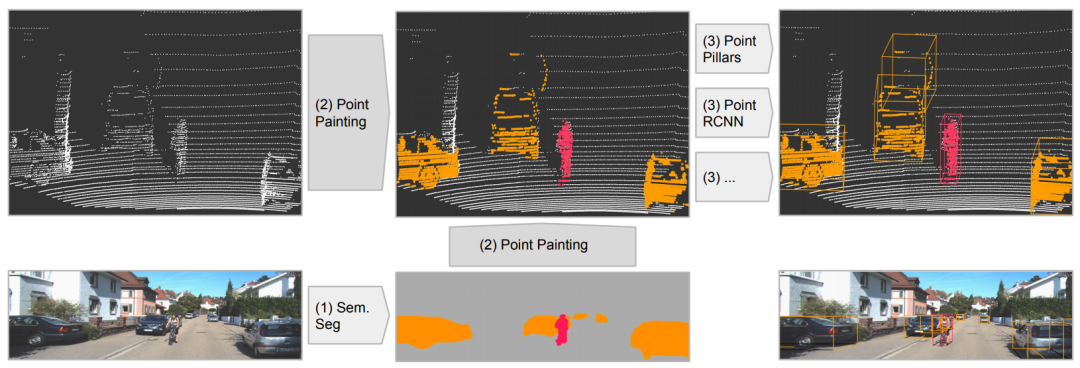
PointPainting: Sequential Fusion for 3D Object Detection文章鏈接: https://arxiv.org/pdf/1911.10150 發(fā)表在CVPR20,該工作的fusion方式是采用二維語(yǔ)義分割信息通過(guò)lidar信息和image信息的變換矩陣融合到點(diǎn)上,再采用baseline物體檢測(cè);可以理解為對(duì)于語(yǔ)義分割出的物體多了一些信息作為引導(dǎo),得到更好的檢測(cè)精度。和上面的pi-rcnn的不同之處是該融合是一個(gè)串聯(lián)的網(wǎng)絡(luò)結(jié)構(gòu),將語(yǔ)義分割后的特征和原始點(diǎn)云一起送入深度學(xué)習(xí)網(wǎng)絡(luò)中。
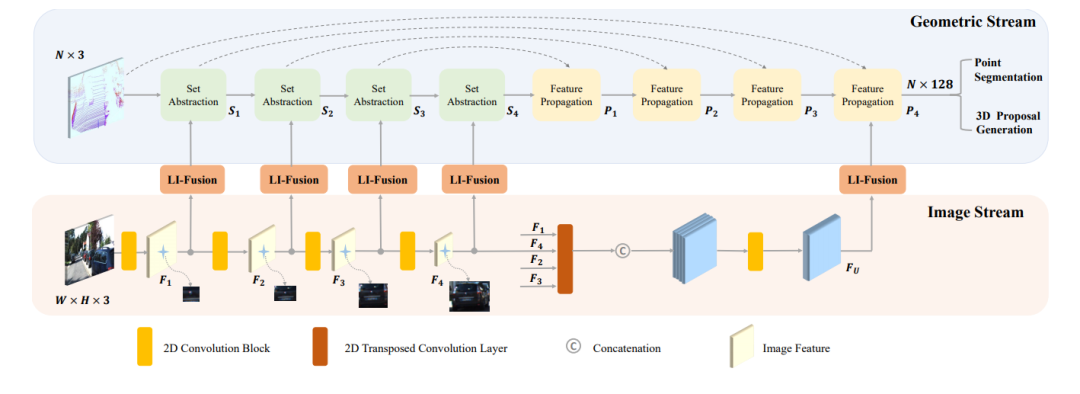
EPNet: Enhancing Point Features with Image Semantics for 3D Object Detection文章鏈接: https://arxiv.org/pdf/2007.08856 發(fā)表在ECCV20的文章,如下圖所示,其網(wǎng)絡(luò)結(jié)構(gòu)點(diǎn)云分支是point encoder-decoder的結(jié)構(gòu),圖像分支則是一個(gè)逐步encoder的網(wǎng)絡(luò),并且逐層做特征融合。
2.2 late-fuion
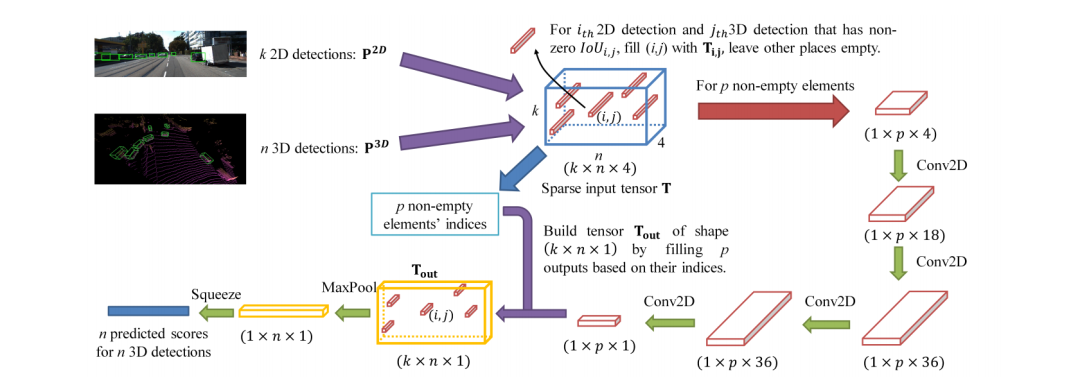
在決策層面的融合相對(duì)簡(jiǎn)單很多,不需要考慮在信息層面的融合和互補(bǔ),也就是說(shuō),只要是兩種網(wǎng)絡(luò)做同樣的任務(wù),那么在得到各自的結(jié)果后,對(duì)結(jié)果做決策上的選擇融合。CLOCs: Camera-LiDAR Object Candidates Fusion for 3D Object Detectionhttps://arxiv.org/pdf/2009.00784.pdf 這就是筆者上一篇分享的文章,從下圖可以看出該網(wǎng)絡(luò)經(jīng)歷了三個(gè)主要的階段: (1)2D和3D的目標(biāo)檢測(cè)器分別提出proposals (2)將兩種模態(tài)的proposals編碼成稀疏張量 (3)對(duì)于非空的元素采用二維卷積做對(duì)應(yīng)的特征融合。
3 筆者總結(jié)
本文主要就目前的幾篇做多模態(tài)融合的文章做了一定的介紹,從大層面上的fusion的階段講起,然后進(jìn)一步在deep-fuion階段劃分為基于point-based和voxel-based的融合方法,基于point的方法具有先天的優(yōu)勢(shì)是具有和image 的索引和不具有空間變化,而voxel的方法可以更有效的利用卷積的感知能力。最后大家如果對(duì)自動(dòng)駕駛場(chǎng)景感知的研究比較感興趣和想要找文章的話,可以去以下鏈接找最新的研究。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2562文章
52524瀏覽量
763444 -
3D
+關(guān)注
關(guān)注
9文章
2950瀏覽量
109414 -
目標(biāo)檢測(cè)
+關(guān)注
關(guān)注
0文章
222瀏覽量
15891
原文標(biāo)題:綜述:3D目標(biāo)檢測(cè)多模態(tài)融合算法
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
海康威視發(fā)布多模態(tài)大模型AI融合巡檢超腦
?多模態(tài)交互技術(shù)解析
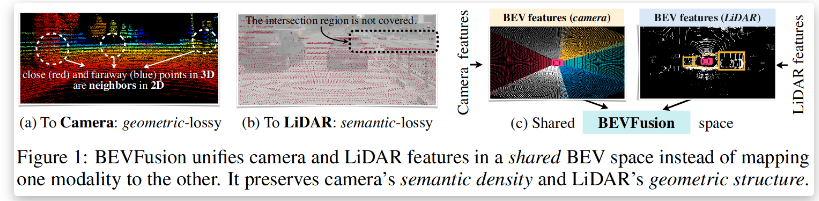
BEVFusion —面向自動(dòng)駕駛的多任務(wù)多傳感器高效融合框架技術(shù)詳解
3D打印中XPR技術(shù)對(duì)于打印效果的影響?
海康機(jī)器人3D檢測(cè)案例入選實(shí)數(shù)融合典型案例
研究用于獨(dú)立檢測(cè)壓力和溫度的3D主動(dòng)矩陣多模態(tài)傳感器陣列

超聲界“內(nèi)卷終結(jié)者”!ZRT智銳通提供全新引擎打造多模態(tài)影像融合系統(tǒng)

利用OpenVINO部署Qwen2多模態(tài)模型

安寶特產(chǎn)品 安寶特3D Analyzer:智能的3D CAD高級(jí)分析工具

奧比中光3D相機(jī)打造高質(zhì)量、低成本的3D動(dòng)作捕捉與3D動(dòng)畫(huà)內(nèi)容生成方案
蘇州吳中區(qū)多色PCB板元器件3D視覺(jué)檢測(cè)技術(shù)

工業(yè)鏡頭在3D結(jié)構(gòu)光檢測(cè)中實(shí)際應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論