") 如何為Linux添加設(shè)備驅(qū)動
如何為Linux添加設(shè)備驅(qū)動
哈嘍,我是老吳。
非常懷念寫文章的感覺。
昨晚復(fù)習(xí)了一些 Linux 驅(qū)動的基礎(chǔ)知識,給大家分享一下吧。
先說結(jié)論:
多年來,我接觸到的 Linux 驅(qū)動教程大多都是從 0 編寫,這樣對初學(xué)者而言最大的好處,就是可以接觸到比較多的底層原理。
但是在真正的工作場景里,其實是應(yīng)該盡量避免從 0 構(gòu)建自己的設(shè)備驅(qū)動的。
更好的做法是在高度模塊化的驅(qū)動框架里添加自己的設(shè)備驅(qū)動。
這樣做的好處是最大程度地復(fù)用內(nèi)核現(xiàn)有的代碼,同時獲得極大的彈性和可維護(hù)性,并且為應(yīng)用程序提供出統(tǒng)一的訪問接口。
下面詳細(xì)地說說。
什么是設(shè)備驅(qū)動?
設(shè)備驅(qū)動程序 (device driver) 是對硬件的抽象:
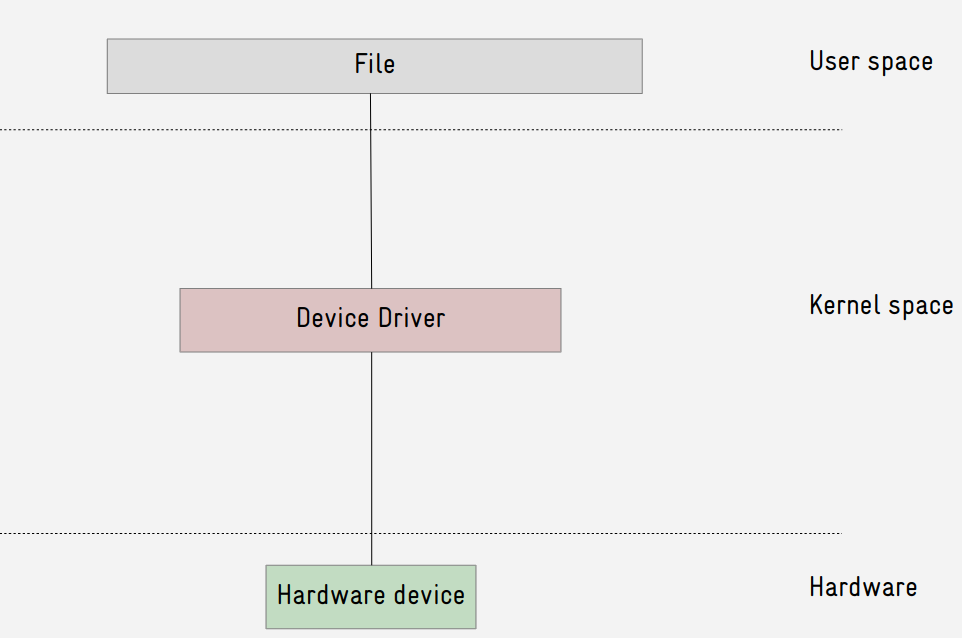
提供基礎(chǔ)框架來編寫和運(yùn)行設(shè)備驅(qū)動程序是操作系統(tǒng)內(nèi)核責(zé)任的一部分。
盡管可以在用戶空間中運(yùn)行設(shè)備驅(qū)動程序(通過一些內(nèi)核接口,如 UIO 或 I2CDEV),更常見的情況是讓它們在內(nèi)核空間中運(yùn)行。
以字符設(shè)備驅(qū)動為例:
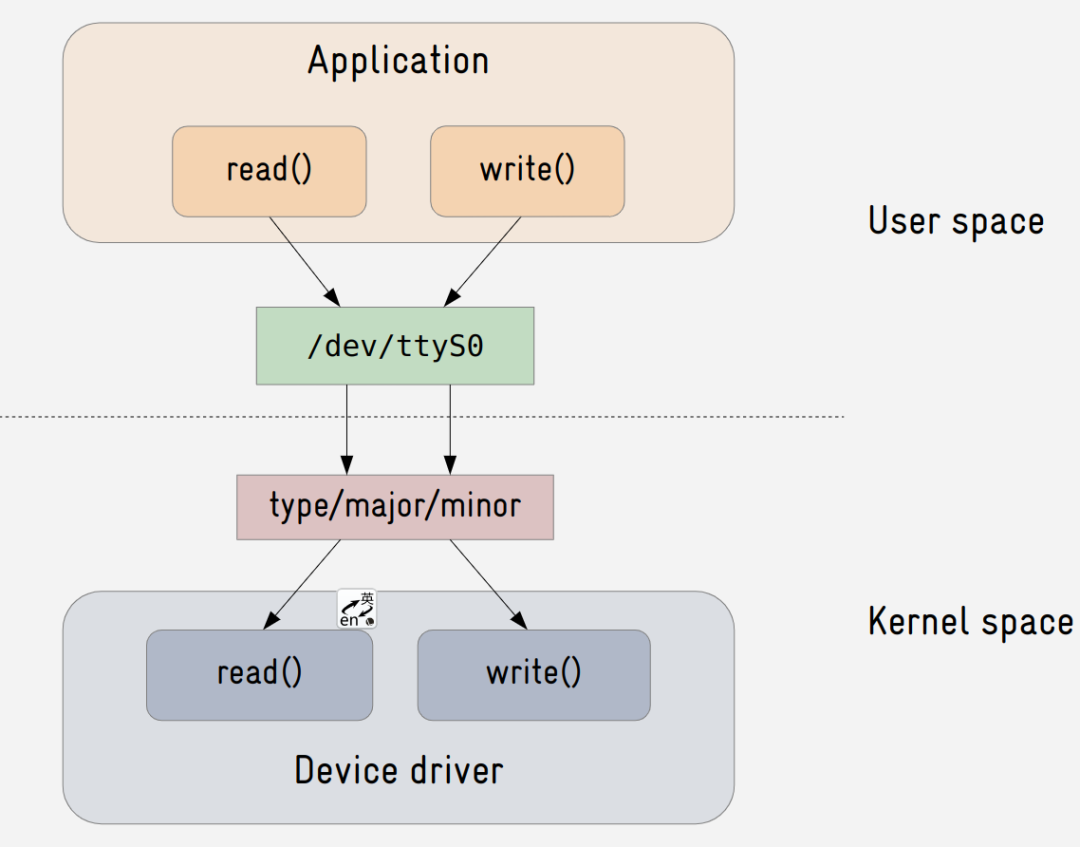
字符設(shè)備 (char device) 是一種最常見的硬件抽象。
/dev 目錄下的設(shè)備節(jié)點文件就是內(nèi)核導(dǎo)出給用戶空間的訪問設(shè)備驅(qū)動的接口。
設(shè)備節(jié)點文件中有三個基本信息:
-
Type,用于標(biāo)識是 block 還是 char device;
-
Major number,用于標(biāo)志是那一類 char deivce;
-
Minor number,用于標(biāo)志是哪一個 char device;
編寫字符設(shè)備驅(qū)動的流程:
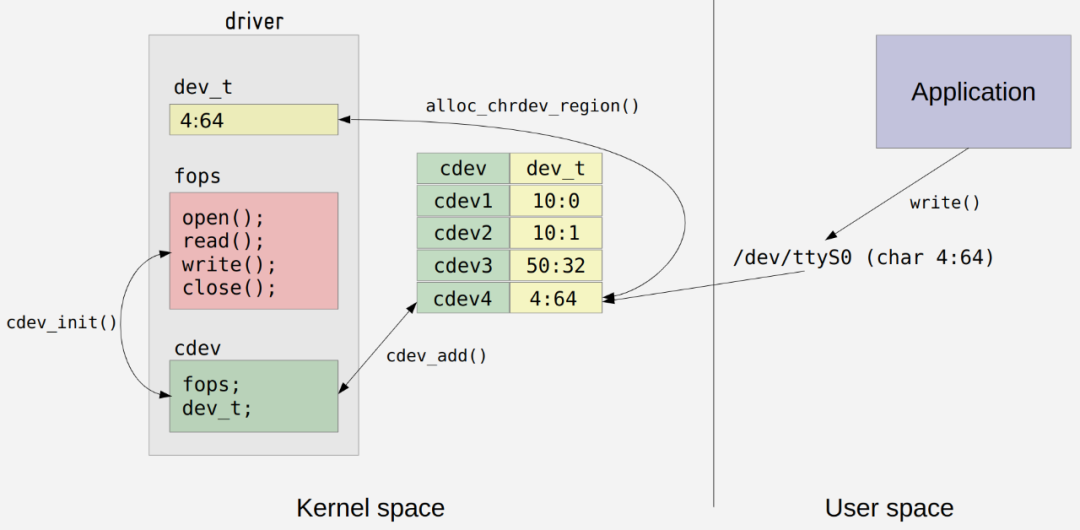
1、分配設(shè)備號,這通過 register_chrdev_region() 或 alloc_chrdev_region() 來完成;
2、實現(xiàn)文件操作(open、read、write、ioctl)等。
3、使用 cdev_init() 和 cdev_add() 向內(nèi)核中注冊字符設(shè)備。
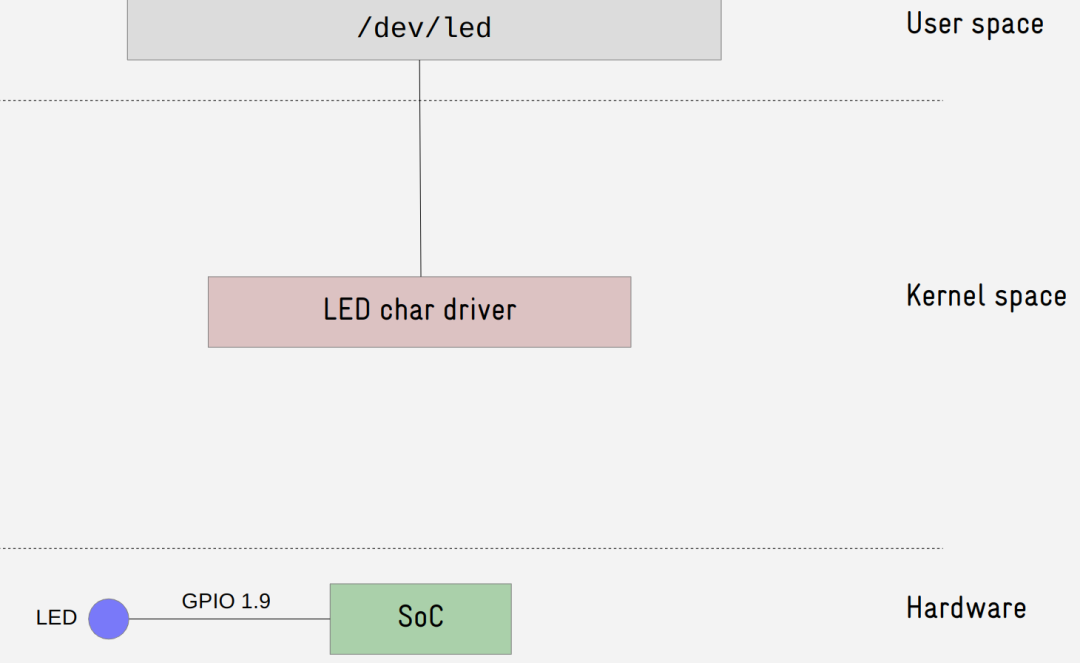
以 LED 字符設(shè)備驅(qū)動為例
如果按照從 0 構(gòu)建的思路編寫驅(qū)動的話,偽代碼如下:
硬件訪問相關(guān):
staticstruct{
dev_tdevnum;
structcdevcdev;
unsignedintled_status;
void__iomem*regbase;
}drvled_data;
staticvoiddrvled_setled(unsignedintstatus)
{
u32val;
/*setvalue*/
val=readl(drvled_data.regbase+GPIO1_REG_DATA);
if(status==LED_ON)
val|=GPIO_BIT;
elseif(status==LED_OFF)
val&=~GPIO_BIT;
writel(val,drvled_data.regbase+GPIO1_REG_DATA);
/*updatestatus*/
drvled_data.led_status=status;
}
staticvoiddrvled_setdirection(void)
{
...
}
文件操作相關(guān):
staticssize_tdrvled_read(structfile*file,char__user*buf,
size_tcount,loff_t*ppos)
{
...
}
staticssize_tdrvled_write(structfile*file,constchar__user*buf,
size_tcount,loff_t*ppos)
{
charkbuf=0;
if(copy_from_user(&kbuf,buf,1))
return-EFAULT;
if(kbuf=='1'){
drvled_setled(LED_ON);
pr_info("LEDON!
");
}elseif(kbuf=='0'){
drvled_setled(LED_OFF);
pr_info("LEDOFF!
");
}
returncount;
}
staticconststructfile_operationsdrvled_fops={
.owner=THIS_MODULE,
.write=drvled_write,
.read=drvled_read,
};
注冊和卸載字符設(shè)備相關(guān):
staticint__initdrvled_init(void)
{
intresult=0;
if(!request_mem_region(GPIO1_BASE,GPIO1_SIZE,DRIVER_NAME)){
pr_err("%s:ErrorrequestingI/O!
",DRIVER_NAME);
result=-EBUSY;
gotoret_err_request_mem_region;
}
drvled_data.regbase=ioremap(GPIO1_BASE,GPIO1_SIZE);
if(!drvled_data.regbase){
pr_err("%s:ErrormappingI/O!
",DRIVER_NAME);
result=-ENOMEM;
gotoerr_ioremap;
}
result=alloc_chrdev_region(&drvled_data.devnum,0,1,DRIVER_NAME);
if(result){
pr_err("%s:Failedtoallocatedevicenumber!
",DRIVER_NAME);
gotoret_err_alloc_chrdev_region;
}
cdev_init(&drvled_data.cdev,&drvled_fops);
result=cdev_add(&drvled_data.cdev,drvled_data.devnum,1);
if(result){
pr_err("%s:Chardeviceregistrationfailed!
",DRIVER_NAME);
gotoret_err_cdev_add;
}
drvled_setdirection();
drvled_setled(LED_OFF);
pr_info("%s:initialized.
",DRIVER_NAME);
gotoret_ok;
ret_err_cdev_add:
unregister_chrdev_region(drvled_data.devnum,1);
ret_err_alloc_chrdev_region:
iounmap(drvled_data.regbase);
err_ioremap:
release_mem_region(GPIO1_BASE,GPIO1_SIZE);
ret_err_request_mem_region:
ret_ok:
returnresult;
}
staticvoid__exitdrvled_exit(void)
{
...
}
module_init(drvled_init);
module_exit(drvled_exit);
運(yùn)行效果:
$installledrv.ko
$ls/dev/led
#燈亮
$echo1>/dev/led
#燈滅
$echo1>/dev/led
三個問題
單從功能的角度看,上面的程序完全滿足控制一個 LED 的需求。
但是,它不是一個好的驅(qū)動,這里有 3 個問題。
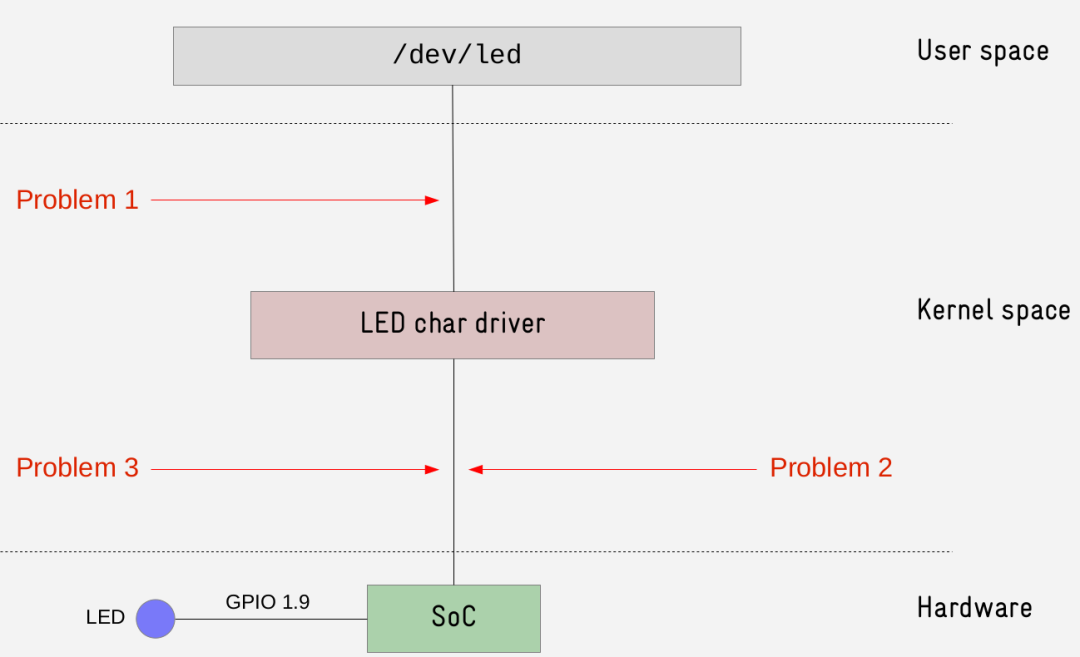
問題 1:
它創(chuàng)建的接口是 /dev/led,這不是一個通用接口,會增加上層開發(fā)人員的學(xué)習(xí)成本。
解決這個問題需要在 LED char driver 上再添加一層 LED framework,LED framework 負(fù)責(zé)給用戶空間提供標(biāo)準(zhǔn)化的訪問接口,同時用于添加可復(fù)用的邏輯功能。
基本上各種設(shè)備驅(qū)動都有自己的 framework,例如 input,IIO, ALSA, V2L2, RTC, watchdog 等。
使用這些 framework 驅(qū)動工程師不用考慮提供給用戶空間的接口,應(yīng)用開發(fā)人員也只需要學(xué)習(xí)一次標(biāo)準(zhǔn)的硬件訪問接口接口。
問題 2:
它只是控制 1 個 gpio,但是卻申請使用了 2 個寄存器,這 2 個寄存器負(fù)責(zé)控制芯片的 8 個 gpio。這意味著其他 7 個 gpio 再也沒法被其他驅(qū)動申請使用。
解決這個問題需要引入一個 gpio 的管理者:gpiolib。gpiolib 負(fù)責(zé)統(tǒng)一管理和分配 gpio 資源。
問題 3:
它包含了硬件信息。如果我們想控制另外一個 gpio或者多個 gpio,就得改動源碼,代碼維護(hù)的工作量極大。
解決這個問題我們需要將硬件信息從代碼中抽取出來,具體的就是引入總線、設(shè)備、驅(qū)動模型。
更好的 LED 驅(qū)動
我們用上面的思路,寫一個更合理的 LED 驅(qū)動。
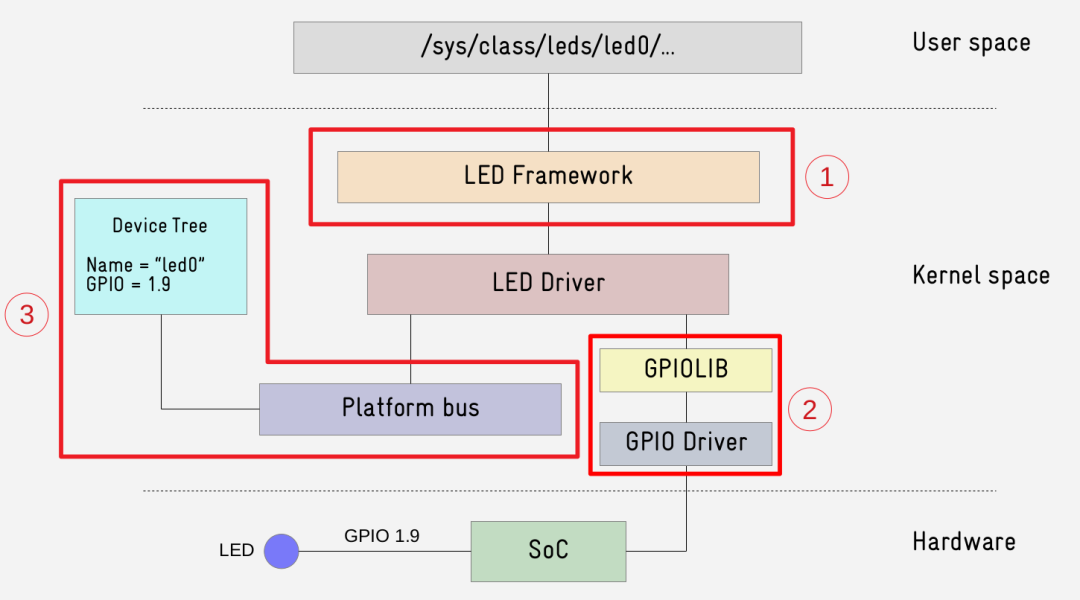
引入 LED framework:
1、初始化 led_classdev 結(jié)構(gòu)體。
2、提供一個回調(diào)函數(shù)來改變狀態(tài) LED 的。
3、使用 led_classdev_register() 在想 LED framework 注冊驅(qū)動程序。
引入 gpiolib:
內(nèi)核管理 gpio 的思路是典型的 producer/consumer 模型。
GPIO controller driver 是 producer,LED driver 是 consumer。
下面是幾個常用的 gpiolib api,它們的作用一目了然:
#include
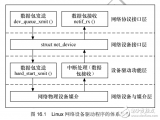
引入總線、設(shè)備、驅(qū)動模型 :
該模型包含 4 部分。
Bus core: 對硬件總線的抽象,不同總線有不同的 Bus core,例如 USB core, SPI core,I2C core, PCI core ,在內(nèi)核中由 bus_type 結(jié)構(gòu)表示。
Bus adapters: 總線控制器驅(qū)動程序,在內(nèi)核中由 device_driver 結(jié)構(gòu)體表示。
Bus drivers: 負(fù)責(zé)管理連接到總線的設(shè)備的驅(qū)動程序,在內(nèi)核中由 device_driver 結(jié)構(gòu)體表示。
Bus devices: 連接到總線的設(shè)備,在內(nèi)核中由結(jié)構(gòu) device 表示。
內(nèi)核虛擬了一條叫 Platform 的總線,用于適配 LED 這種不屬于任何總線的設(shè)備。
看下改造后的代碼:
設(shè)備信息:
LED {
<&gpio1 9>
}
硬件控制:
taticstructdrvled_data_st*drvled_data;
staticvoiddrvled_setled(unsignedintstatus)
{
//控制gpio
if(status==LED_ON)
gpiod_set_value(drvled_data->desc,1);
else
gpiod_set_value(drvled_data->desc,0);
}
staticvoiddrvled_change_state(structled_classdev*led_cdev,
enumled_brightnessbrightness)
{
if(brightness)
drvled_setled(LED_ON);
else
drvled_setled(LED_OFF);
}
向 LED framework 注冊:
staticintdrvled_probe(structplatform_device*pdev)
{
structdevice_node*np=pdev->dev.of_node;
structdevice_node*child=NULL;
intresult,gpio;
child=of_get_next_child(np,NULL);
drvled_data=devm_kzalloc(&pdev->dev,sizeof(*drvled_data),
GFP_KERNEL);
if(!drvled_data)
return-ENOMEM;
//從設(shè)備數(shù)中獲得硬件信息
gpio=of_get_gpio(child,0);
result=devm_gpio_request(&pdev->dev,gpio,pdev->name);
if(result){
dev_err(&pdev->dev,"ErrorrequestingGPIO
");
returnresult;
}
drvled_data->desc=gpio_to_desc(gpio);
drvled_data->led_cdev.name=of_get_property(child,"label",NULL);
drvled_data->led_cdev.brightness_set=drvled_change_state;
//注冊進(jìn)LEDframework
result=devm_led_classdev_register(&pdev->dev,&drvled_data->led_cdev);
if(result){
dev_err(&pdev->dev,"Errorregisteringled
");
returnresult;
}
gpiod_direction_output(drvled_data->desc,0);
dev_info(&pdev->dev,"initialized.
");
return0;
}
staticintdrvled_remove(structplatform_device*pdev)
{
dev_info(&pdev->dev,"exiting.
");
return0;
}
staticconststructof_device_idof_drvled_match[]={
{.compatible="labworks,drvled"},
{},
};
staticstructplatform_driverdrvled_driver={
.driver={
.name="drvleds",
.owner=THIS_MODULE,
.of_match_table=of_drvled_match,
},
.probe=drvled_probe,
.remove=drvled_remove,
};
module_platform_driver(drvled_driver);
改造后,應(yīng)用總是通過下面這種標(biāo)準(zhǔn)的接口訪問 LED:
#燈亮
$echo1>/sys/class/leds//brightness
#燈滅
$echo0>/sys/class/leds//brightness
并且有大量的 trigger 可供使用,例如讓 LED 呈心跳狀態(tài)的 heartbeat trigger:
$echoheartbeat>/sys/class/leds//trigger
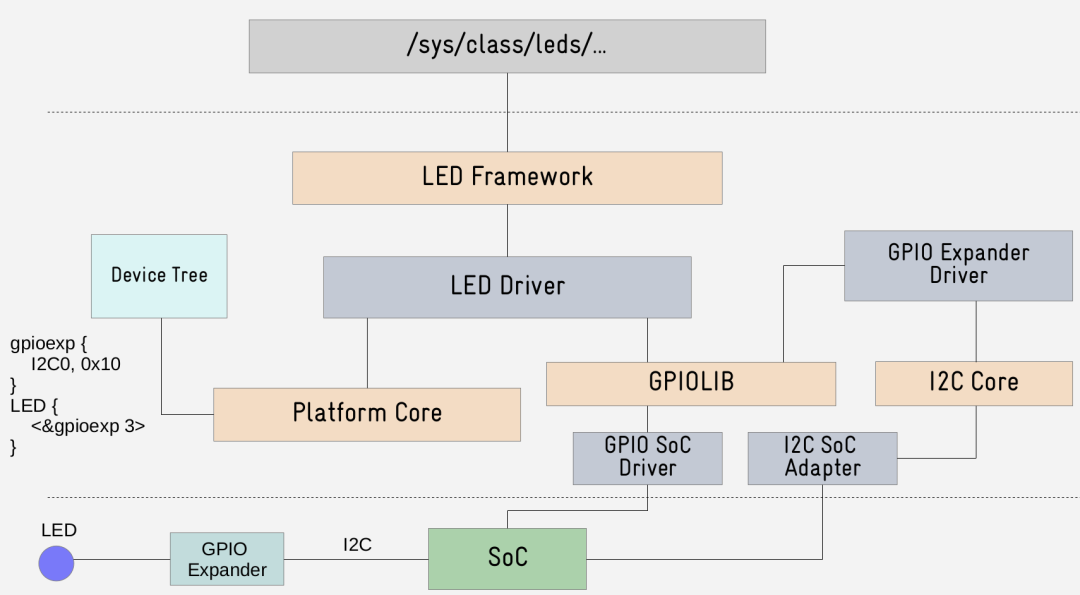
假設(shè)這時你想改用 gpio expander 芯片來控制 LED:
只需要添加這個 gpio expander 的驅(qū)動代碼,并且修改設(shè)備樹即可,其他部分完全不需要改動:
gpioexp {
I2C0, 0x10
}
LED {
<&gpioexp 3>
}
到此,你是否更清楚如何為 Linux 添加設(shè)備驅(qū)動了呢?
-
Linux
+關(guān)注
關(guān)注
87文章
11465瀏覽量
212817 -
驅(qū)動程序
+關(guān)注
關(guān)注
19文章
859瀏覽量
48855
原文標(biāo)題:重新理解一波設(shè)備驅(qū)動 | Linux 驅(qū)動
文章出處:【微信號:yikoulinux,微信公眾號:一口Linux】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
Linux內(nèi)核模塊解析設(shè)備樹內(nèi)容
iMPACT添加設(shè)備錯誤是怎么回事
嵌入式Linux設(shè)備驅(qū)動開發(fā)

嵌入式Linux的USB驅(qū)動添加及應(yīng)用
uclinux添加設(shè)備驅(qū)動的完整過程
ARM-Linux-IIC設(shè)備的添加與驅(qū)動實現(xiàn)

《Linux設(shè)備驅(qū)動開發(fā)詳解》第16章、Linux網(wǎng)絡(luò)設(shè)備驅(qū)動
《Linux設(shè)備驅(qū)動開發(fā)詳解》第8章、Linux設(shè)備驅(qū)動中的阻塞與非阻塞IO

如何為Linux編寫用戶空間設(shè)備驅(qū)動程序
你知道Linux設(shè)備驅(qū)動模型是怎么樣構(gòu)成的?
Home Assistant添加ESPHome設(shè)備(IO控制繼電器)

ARM-Linux-IIC設(shè)備的添加與驅(qū)動實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論