") KUKA機(jī)器人制動(dòng)-BRAKE
KUKA機(jī)器人制動(dòng)-BRAKE
機(jī)器人的制動(dòng)
應(yīng)在出現(xiàn)一個(gè)事件后立即停住機(jī)器人。
有兩個(gè)制動(dòng)斜坡可供選擇(STOP 1 和 STOP 2)。
機(jī)器人停下時(shí),中斷程序先繼續(xù)運(yùn)行。
中斷程序一結(jié)束,已開(kāi)始的機(jī)器人運(yùn)動(dòng)就將繼續(xù)進(jìn)行。
句法:
1. BRAKE:STOP 2
2. BRAKE F:STOP 1
BRAKE 只能用于一個(gè)中斷程序中。
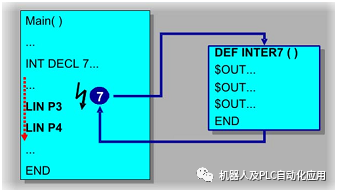
如果處理中斷例程的時(shí)間短于主程序中制定的軌跡規(guī)劃,則機(jī)器人可不中斷而繼續(xù)運(yùn)行。如果中斷例程所需的時(shí)間長(zhǎng)于規(guī)劃的軌跡,則機(jī)器人在其軌跡規(guī)劃的終點(diǎn)停下,中斷例程一執(zhí)行完畢,它將繼續(xù)運(yùn)行。
不允許使用用于初始化 (INI ) 或運(yùn)動(dòng)(例如 PTP 或 LIN ...)的聯(lián)機(jī)表單。處理時(shí)這些表單將引發(fā)出錯(cuò)信息。
機(jī)器人被用 BRAKE 停住,中斷例程結(jié)束時(shí)它將沿著主程序中計(jì)劃的軌跡繼續(xù)運(yùn)行。
機(jī)器人被用 BRAKE 停住,在中斷例程中運(yùn)行。中斷例程結(jié)束后將繼續(xù)沿著主程序中定義的軌跡運(yùn)行。
例如:
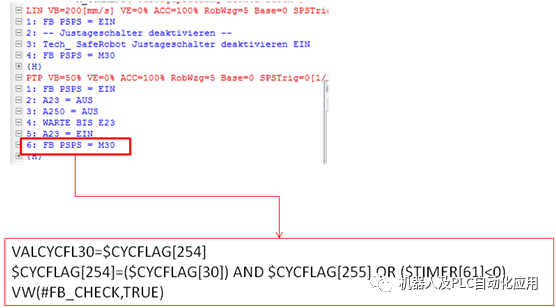
機(jī)器人運(yùn)動(dòng)過(guò)程等待條件FB SPS的結(jié)合BRAKE深入分析
DEF FB_CHECK ()
IF $CYCFLAG[254] AND ($TIMER[61]<0)THEN
BRAKE如果有M254 還有T61 就停止移動(dòng)軌跡-
IF $PRO_MODE<>#BSTEP THEN -程序不是單步-
WAITFOR ($TIMER[61]>0) -等待T61在單步后由-300轉(zhuǎn)而大于0
ENDIF
ENDIF
$LOOP_CONT=TRUE-循環(huán)控制當(dāng)$LOOP_CONT=False時(shí)是開(kāi)啟了模擬指令-
WAITFOR $CYCFLAG[254] OR ( NOT ($LOOP_CONT) AND ($MODE_OP<>#EX))
等待M 254 –或者在手動(dòng)時(shí)模擬信號(hào)-
$LOOP_CONT=TRUE
END
審核編輯 :李倩
-
程序
+關(guān)注
關(guān)注
117文章
3824瀏覽量
82420 -
KUKA機(jī)器人
+關(guān)注
關(guān)注
4文章
144瀏覽量
9485
原文標(biāo)題:KUKA機(jī)器人制動(dòng)-BRAKE
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
KUKA重型機(jī)器人
求KUKA機(jī)器人控制柜三維模型
KUKA機(jī)器人問(wèn)題解答
KUKA庫(kù)卡機(jī)器人伺服驅(qū)動(dòng)器相關(guān)型號(hào)舉例
KUKA焊接機(jī)器人伺服電機(jī)常見(jiàn)故障及維修處理
工業(yè)機(jī)器人組成結(jié)構(gòu)相關(guān)資料分享
庫(kù)卡機(jī)器人MGV電源模塊維修
機(jī)器人系統(tǒng)與控制需求簡(jiǎn)介
KUKA機(jī)器人伺服驅(qū)動(dòng)模塊維修
沒(méi)有有前輩用LabVIEW控制kuka機(jī)器人c2的經(jīng)驗(yàn)?通訊是怎么做到的?
淺談KUKA機(jī)器人制動(dòng)-BRAKE V4.26

KUKA機(jī)器人制動(dòng)-BRAKE V5.20操作程序

KUKA機(jī)器人編程說(shuō)明(英文)
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論