 從保守到開放,機器人如何選擇關節驅動器
從保守到開放,機器人如何選擇關節驅動器
工業機器人發展到現在,細分的種類不在少數,目前最為常見的是Delta機器人、SCARA機器人、多關節機器人以及新興的協作機器人。隨著國內制造業升級,相當多此前工業機器人未曾涉足的場景開始涌現自動化改造需求。在這些新的改造需求里,大都和多關節機器人與協作機器人有關。這些名稱不同應用場景不同的工業機器人,說到底仍然是一種多關節機械手或多自由度的機器裝置。
既然是多關節機械手或多自由度的機器裝置,那么就離不開伺服驅動。不管工業機器人如何發展如何與其他技術結合,它的伺服驅動決定了它最基礎的運動能力。低成本通用的伺服驅動就不多提了,這個市場上產品太多太多,只要能滿足基本的控制要求就行,剩下的就是打價格戰。換作現在開始起量的多關節多自由度機器人,它對驅動能力的要求更考驗驅控芯片的整體性能。
STM32G4與STM32F4
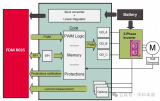
單芯片仍然是國內做工業機器人關節驅動最常見的方案,在這里STM32G4是一個備受大家認可的選擇。STM32G4系列作為一個混合信號MCU,自帶了DSP和FPU指令。
ST的各個系列想必大家已經不陌生了,主流系列都有適配機器人關節驅動的產品。而STM32G4系列170 MHz的32位Arm Cortex-M4內核不僅支持DSP指令與FPU,還配置了ART Accelerator、CCM-SRAM程序執行加速器以及數學運算加速器這三款硬件加速器。
這里拎一款G4系列高性能的MCU來看。STM32G473xC屬于G4系列里的高配型,除了支持所有Arm單精度數據處理指令和所有數據類型,還配置了內存保護單元(MPU)以確保應用程序的安全性。
高配版除了嵌入了更大容量的高速存儲器(512KB閃存與128KB SRAM),ST還在這個系列里加入了多種保護機制,如讀出保護、寫入保護、安全存儲區域和專有代碼讀出保護。功能強大的指令集與存儲的嵌入,極大加快處理能力。這些顯然還不夠,STM32G473xC還提供了五個快速12bit ADC、七個比較器、六個運算放大器、七個DAC、一個內部電壓基準緩沖器、一個低功耗RTC、兩個三個通用32位定時器、三個專用于電機控制的16位PWM定時器、七個通用16位定時器和一個16位低功耗定時器。所有的配置,都只為了一個目標——精準的電機控制。
F4系列可能比G4系列更為機器人工程師熟知。作為ST旗下高性能MCU的代表系列,在國內外很多機器人應用中都已經證明了它自身出色的實力。在以前機器人芯片應用較為保守的階段,F4系列無疑是口碑與性能俱佳的選擇。
F4系列同樣采用了Arm Cortex-M4內核,而且同樣帶有DSP與FPU指令,與G4系列不同的是它采用了ST的NVM工藝。在最高180 MHz的工作頻率下通過閃存執行時其處理性能達到225 DMIPS/608 CoreMark,用ST自己的話來描述這一性能是這樣的,“這是迄今所有基于Cortex-M內核的微控制器產品所達到的最高基準測試分數”。
STM32F469xx是F4系列里高端產品,除開更高的主頻,它嵌入的高速存儲器中,閃存就高達2 MB,SRAM則高達384 KB,這還不算上備份SRAM。F4本身優異的性能就能勝任關節驅動,如果機器人對功能可拓展性要求更高,那么用F4加上FPGA組成異構架構也是常見的做法。
Zynq-7000 SoC
XILINX集成ARM處理器軟件可編程性與FPGA硬件可編程性的Zynq-7000在多軸控制上可以說風頭正勁。不想做DSP加FPGA這么麻煩的話這個方案就是最好的選擇,只要廠商“不差錢”。

Zynq-7000集成了雙核ARM Cortex-A9處理器與28nm可編程邏輯,比起傳統的分立式處理器和FPGA系統,在功耗和性能上都有大的提升。根據XILINX給出的數據,ARM Cortex-A9比同類SoC處理性能上快25%,FPGA邏輯比同類競爭架構快66%,而功耗則比同類方案低了50%以上。
采用CoreSight技術的雙核A9支持單精度與雙精度浮點,運行速率高達1GHz,拔群的性能與低功耗的結合罕有對手。存儲器系統也是大得嚇人,且不說集成式的存儲控制器,光512KB的高速緩存已經夠大了,片上的256KB存儲又容納了整個實時操作系統。
這類器件中處理系統和可編程邏輯之間的互連是極其關鍵的。Zynq-7000使用了AMBA開放標準互聯端口,PS與PL之間帶寬高達100Gb/s,且64位AXI ACP端口為附加的軟處理器實現了增強的硬件加速性能和緩存一致性。為了實現大量并行信號的處理,Zynq-7000中有著超過2020個DSP模塊。
如果對視覺的要求沒有那么高,Zynq-7000s也不失為一個沒有那么貴的選擇。單核ARM Cortex-A9處理器加上28nm可編程邏輯,對于多軸控制也足夠了。
小結
隨著國內工業機器人廠商的增多,機器人廠商都開始尋求最適合自己的主控芯片,這不僅要考慮性能,功能,還有成本等多方面因素。所以以前保守的廠商現在也都愿意嘗試一下不同的芯片。今天列出的僅僅是機器人關節驅動芯片里的兩個為人熟知的系列,在這個應用領域里,還大有優秀的產品值得挖掘。
既然是多關節機械手或多自由度的機器裝置,那么就離不開伺服驅動。不管工業機器人如何發展如何與其他技術結合,它的伺服驅動決定了它最基礎的運動能力。低成本通用的伺服驅動就不多提了,這個市場上產品太多太多,只要能滿足基本的控制要求就行,剩下的就是打價格戰。換作現在開始起量的多關節多自由度機器人,它對驅動能力的要求更考驗驅控芯片的整體性能。
STM32G4與STM32F4
單芯片仍然是國內做工業機器人關節驅動最常見的方案,在這里STM32G4是一個備受大家認可的選擇。STM32G4系列作為一個混合信號MCU,自帶了DSP和FPU指令。
(圖源:ST)
ST的各個系列想必大家已經不陌生了,主流系列都有適配機器人關節驅動的產品。而STM32G4系列170 MHz的32位Arm Cortex-M4內核不僅支持DSP指令與FPU,還配置了ART Accelerator、CCM-SRAM程序執行加速器以及數學運算加速器這三款硬件加速器。
這里拎一款G4系列高性能的MCU來看。STM32G473xC屬于G4系列里的高配型,除了支持所有Arm單精度數據處理指令和所有數據類型,還配置了內存保護單元(MPU)以確保應用程序的安全性。
高配版除了嵌入了更大容量的高速存儲器(512KB閃存與128KB SRAM),ST還在這個系列里加入了多種保護機制,如讀出保護、寫入保護、安全存儲區域和專有代碼讀出保護。功能強大的指令集與存儲的嵌入,極大加快處理能力。這些顯然還不夠,STM32G473xC還提供了五個快速12bit ADC、七個比較器、六個運算放大器、七個DAC、一個內部電壓基準緩沖器、一個低功耗RTC、兩個三個通用32位定時器、三個專用于電機控制的16位PWM定時器、七個通用16位定時器和一個16位低功耗定時器。所有的配置,都只為了一個目標——精準的電機控制。
F4系列可能比G4系列更為機器人工程師熟知。作為ST旗下高性能MCU的代表系列,在國內外很多機器人應用中都已經證明了它自身出色的實力。在以前機器人芯片應用較為保守的階段,F4系列無疑是口碑與性能俱佳的選擇。
F4系列同樣采用了Arm Cortex-M4內核,而且同樣帶有DSP與FPU指令,與G4系列不同的是它采用了ST的NVM工藝。在最高180 MHz的工作頻率下通過閃存執行時其處理性能達到225 DMIPS/608 CoreMark,用ST自己的話來描述這一性能是這樣的,“這是迄今所有基于Cortex-M內核的微控制器產品所達到的最高基準測試分數”。
STM32F469xx是F4系列里高端產品,除開更高的主頻,它嵌入的高速存儲器中,閃存就高達2 MB,SRAM則高達384 KB,這還不算上備份SRAM。F4本身優異的性能就能勝任關節驅動,如果機器人對功能可拓展性要求更高,那么用F4加上FPGA組成異構架構也是常見的做法。
Zynq-7000 SoC
XILINX集成ARM處理器軟件可編程性與FPGA硬件可編程性的Zynq-7000在多軸控制上可以說風頭正勁。不想做DSP加FPGA這么麻煩的話這個方案就是最好的選擇,只要廠商“不差錢”。
(圖源:XILINX)
Zynq-7000集成了雙核ARM Cortex-A9處理器與28nm可編程邏輯,比起傳統的分立式處理器和FPGA系統,在功耗和性能上都有大的提升。根據XILINX給出的數據,ARM Cortex-A9比同類SoC處理性能上快25%,FPGA邏輯比同類競爭架構快66%,而功耗則比同類方案低了50%以上。
采用CoreSight技術的雙核A9支持單精度與雙精度浮點,運行速率高達1GHz,拔群的性能與低功耗的結合罕有對手。存儲器系統也是大得嚇人,且不說集成式的存儲控制器,光512KB的高速緩存已經夠大了,片上的256KB存儲又容納了整個實時操作系統。
這類器件中處理系統和可編程邏輯之間的互連是極其關鍵的。Zynq-7000使用了AMBA開放標準互聯端口,PS與PL之間帶寬高達100Gb/s,且64位AXI ACP端口為附加的軟處理器實現了增強的硬件加速性能和緩存一致性。為了實現大量并行信號的處理,Zynq-7000中有著超過2020個DSP模塊。
如果對視覺的要求沒有那么高,Zynq-7000s也不失為一個沒有那么貴的選擇。單核ARM Cortex-A9處理器加上28nm可編程邏輯,對于多軸控制也足夠了。
小結
隨著國內工業機器人廠商的增多,機器人廠商都開始尋求最適合自己的主控芯片,這不僅要考慮性能,功能,還有成本等多方面因素。所以以前保守的廠商現在也都愿意嘗試一下不同的芯片。今天列出的僅僅是機器人關節驅動芯片里的兩個為人熟知的系列,在這個應用領域里,還大有優秀的產品值得挖掘。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
工業機器人
+關注
關注
91文章
3446瀏覽量
93744
發布評論請先 登錄
相關推薦
熱點推薦
人形機器人關節模組關鍵技術解析,及產業鏈上游電機/傳感器企業一覽
置,用來控制機器人模仿人類頭部、手臂、腿部等的旋轉、俯仰、彎曲、伸展、擺動等動作。 ? 人形機器人關節模組主要有旋轉關節模組和線性關節模組,

主要人形機器人廠商的電機驅動與傳感系統對比
人形機器人電機驅動與傳感技術現狀與趨勢 1. 電機驅動關鍵技術與趨勢 伺服電機 :人形機器人關節常采用閉環伺服系統,包含無刷電機、減速
基于多通道降壓穩壓器的機器人關節供電系統設計
摘要 隨著機器人技術的不斷發展,機器人關節供電系統的設計面臨著越來越高的要求。本文綜述了基于多通道降壓穩壓器的機器人
基于RISC-V內核的嵌入式系統在機器人關節控制中的應用研究
控制提供了新的選擇。本文結合多個基于RISC-V內核的芯片案例,詳細探討了基于RISC-V內核的嵌入式系統在機器人關節控制中的應用研究,分析了其優勢、關鍵技術以及未來應用前景。 一、引言 機器
廣汽集團重磅發布具身智能機器人核心部件 一體式關節產品和低壓伺服驅動器
機器人核心部件——新一代一體式關節產品和低壓伺服驅動器,產品覆蓋機器人從精密操作到高負載運動的全場景需求,技術指標全面對標國際頂尖水平,部分

關節電機驅動,解鎖智能機器人 的“靈動” 密碼
在智能機器人與高端設備的世界里,關節電機驅動是賦予它們靈動身姿的關鍵。它集成電機、減速器、傳感器和驅動

中科本原推出面向人形機器人的關節電機解決方案
在人工智能與高端制造的浪潮中,人形機器人正從科幻想象加速邁向現實。從特斯拉Optimus的工廠分揀到優必選Walker的養老陪護,人形機器人憑借類人形態與智能交互能力,正在工業、醫療、家庭服務等領域掀起革命。而這一變革的核心
霍爾元件DH49E在機器人的關節位置中的應用
霍爾元件在機器人的關節位置中發揮著至關重要的作用。以下是對霍爾元件在機器人關節位置應用的詳細分析: 一、霍爾元件的基本原理 霍爾元件是一種基于霍爾效應的磁傳感
機器人關節的靈動之源:揭秘舵機的技術奧秘
在機器人世界的浩瀚宇宙中,每一個關節的靈動都承載著無盡的技術奧秘。今天,讓我們一起深入探索舵機——這個被譽為機器人“關節”的神奇裝置,了解它如何通過集成電機、減速
伺服驅動器在機器人中的應用案例
的設備。它通過接收來自控制器的指令信號,精確控制電機的電流和電壓,從而實現對機器人關節的精確控制。伺服驅動器通常包括電機、編碼器、功率放大器
機器人關節模組為何選擇雙編碼器設計?
關節模組是機器人關節控制系統中的核心組件,決定了機器人的運動控制與動作精準度。在關節模組中,位置反饋和誤差校正是確保精確運動的關鍵,而雙編碼

專為人形機器人應用打造,助力具身智能行業發展,泰科機器人關節模組持續升級!
為滿足新老客戶在定制人形機器人一體化關節時的最新需求,泰科機器人在結構設計、材料選擇和定制化開發等方面不斷推出創新方案,產品全系可覆蓋人形機器人






 工商網監
工商網監
評論