 一款可無限擴展的軟件定時器MultiTimer
一款可無限擴展的軟件定時器MultiTimer
1. MultiTimer
今天給大家帶來的開源項目是 MultiTimer,一款可無限擴展的軟件定時器,作者0x1abin,目前收獲 95 個 star,遵循 MIT 開源許可協議。
MultiTimer 是一個軟件定時器擴展模塊,可無限擴展你所需的定時器任務,取代傳統的標志位判斷方式, 更優雅更便捷地管理程序的時間觸發時序。
項目地址:https://github.com/0x1abin/MultiTimer
2. 移植MultiTimer
2.1. 移植思路
開源項目在移植過程中主要參考項目的readme文檔,一般只需兩步:
- ① 添加源碼到裸機工程中;
- ② 實現需要的接口;
2.2. 準備裸機工程
本文中我使用的是小熊派IoT開發套件,主控芯片為STM32L431RCT6:
移植之前需要準備一份裸機工程,我使用STM32CubeMX生成,需要初始化以下配置:
- 配置一個串口用于打印信息
- printf重定向
2.3. 添加MultiTimer到工程中
① 復制MultiTimer源碼到工程中
② 在keil中添加 MultiTimer的源碼文件
③ 將MultiTimer頭文件路徑添加到keil中
3. 使用MultiTimer
使用時包含頭文件:
#include "multi_timer.h"
如果遇到multi_timer.c文件中NULL宏定義報錯,則在multi_timer.h中添加
頭文件即可。
3.1. 創建Timer對象
/* USER CODE BEGIN PV */struct Timer timer1;struct Timer timer2;/* USER CODE END PV */
3.2. Timer回調函數
/* Private user code ---------------------------------------------------------*//* USER CODE BEGIN 0 */void timer1_callback(){printf("timer1 timeout! ");}void timer2_callback(){printf("timer2 timeout! ");}/* USER CODE END 0 */
3.3. 初始化并啟動Timer
始化定時器對象,注冊定時器回調處理函數,設置定時時間(ms),循環定時觸發時間:
/* USER CODE BEGIN 2 */printf("multi timer test... ");//重復計時,周期為1000次,即1000ms=1stimer_init(&timer1, timer1_callback, 1000, 1000);timer_start(&timer1);//單次計時,周期為50次,即50mstimer_init(&timer2, timer2_callback, 50, 0);timer_start(&timer2);/* USER CODE END 2 */
3.4. Timer對象處理
在循環中調用Timer對象處理函數,處理函數會判斷鏈表上的每個定時器是否超時,如果超過,則拉起注冊的回調函數:
/* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */timer_loop();}/* USER CODE END 3 */
3.5. 提供Timer時基信號
MultiTimer中所有的定時器都是通過一個32位的計數值_timer_ticks來判斷的,所以需要一個硬件定時器提供時基信號,遞增該值。
本文中使用的是STM32HAL庫,所以通過Systick來提供,無需設置額外的定時器。
在main.c文件的最后編寫Systick回調函數:
/* USER CODE BEGIN 4 */void HAL_SYSTICK_Callback(void){//給multitimer提供時基信號timer_ticks(); //1ms ticks}/* USER CODE END 4 */
然后在stm32l4xx_it.c中調用該回調函數:
/*** @brief This function handles System tick timer.*/void SysTick_Handler(void){/* USER CODE BEGIN SysTick_IRQn 0 */HAL_SYSTICK_IRQHandler();/* USER CODE END SysTick_IRQn 0 */HAL_IncTick();/* USER CODE BEGIN SysTick_IRQn 1 *//* USER CODE END SysTick_IRQn 1 */}
接下來編譯下載,看在串口助手中看到打印的日志: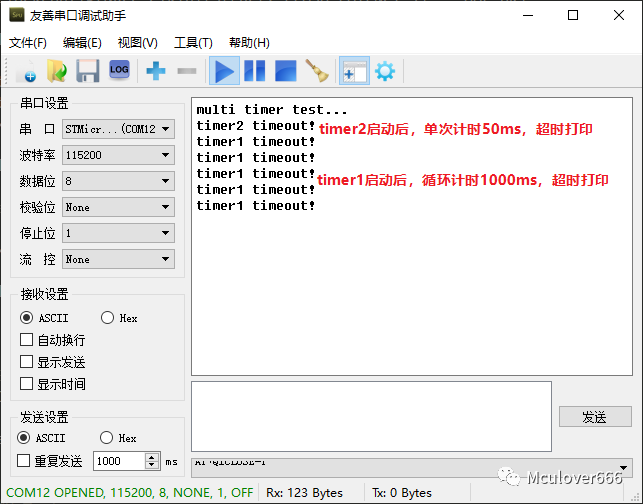
4. MultiTimer設計思想解讀
4.1. 軟件定時器設計思想
MultiTimer的設計比較簡潔。
設置一個計數值_timer_ticks不斷遞增,由定時器提供的中斷驅動,只計次數,不計時間,有了很大的自由度,一般時基信號設置為1ms一次:
/*** @brief background ticks, timer repeat invoking interval 1ms.* @param None.* @retval None.*/void timer_ticks(){_timer_ticks++;}
在程序運行時循環比較定時器設置的超時值是否大于當前_timer_ticks的計數值,如果是則再次判斷是否重復計數值是否為0,是則停止定時器,完成單次計時效果,否則修改計數值,最后拉起注冊到該定時器的回調函數執行:
/*** @brief main loop.* @param None.* @retval None*/void timer_loop(){struct Timer* target;for(target=head_handle; target; target=target->next) {if(_timer_ticks >= target->timeout) {if(target->repeat == 0) {timer_stop(target);} else {target->timeout = _timer_ticks + target->repeat;}target->timeout_cb();}}}
4.2. 單鏈表操作
MultiTimer的代碼少,非常適合拿來學習單鏈表的操作,學習數據結構的過程是乏味的,不如直接來個實例看看是如何操作的。
① 鏈表的節點設計為一個軟件定時器,所以理論上支持的定時器數量只受內存限制。
typedef struct Timer {uint32_t timeout;uint32_t repeat;void (*timeout_cb)(void);struct Timer* next;}Timer;
定時器初始化函數timer_init就是初始化一個鏈表節點:
void timer_init(struct Timer* handle, void(*timeout_cb)(), uint32_t timeout, uint32_t repeat){// memset(handle, sizeof(struct Timer), 0);handle->timeout_cb = timeout_cb;handle->timeout = _timer_ticks + timeout;handle->repeat = repeat;}
② 設置鏈表頭指針,只需知道頭指針就能完成對整個單鏈表的操作:
//timer handle list head.static struct Timer* head_handle = NULL;
③ 向單鏈表增加一個節點
向單鏈表增加一個節點有三種方式:
- 在單鏈表尾部增加一個節點
- 在單鏈表頭部增加一個節點
- 在單鏈表中間增加一個節點
MultiTimer中所有的結點都是定時器,每個定時器之間相互獨立,不存在先后次序關系,所以無論加到中間,還是加到尾部,還是加到頭部,最后的功能都是一樣的,但是在插入算法上有優劣性能之分。
先來看看再單鏈表尾部增加一個節點的算法: ( 我會動哦 )
( 我會動哦 )
int timer_start(struct Timer* handle){/*** 算法1 —— 向單鏈表尾部添加節點* 時間復雜度O(n)* Mculover666*/struct Timer* target = head_handle;if(head_handle == NULL){/* 鏈表為空 */head_handle = handle;handle->next = NULL;}else{/* 鏈表中存在節點,遍歷找最后一個節點 */while(target->next != NULL){if(target == handle)return -1;target = target->next;}target->next = handle;handle->next = NULL;}return 0;}
這種算法理解簡單,實現簡單,但是算法時間復雜度秒變為O(n),當n很大時,插入一個節點的時間就會非常久。
再來看看在鏈表頭部插入一個新節點的情況:
(我會動哦)
int timer_start(struct Timer* handle){/*** 算法2 —— 向單鏈表頭部添加節點* 時間復雜度O(n),如果去掉判斷重復,則時間復雜度O(1)* 0x1abin*/struct Timer *target = head_handle;//判斷是否有重復的定時器while(target){if(target == handle){return -1;}target = target->next;}handle->next = head_handle;head_handle = handle;return 0;}
這里第二種頭部插入節點的算法時間復雜度依然是O(n),emmm?
其實,這里因為單鏈表節點是定時器,在插入的時候需要對整個鏈表進行判斷,避免重復添加同樣的定時器節點,所以無論任何一種算法,都需要對單鏈表進行遍歷。
如果在不需要判斷重復的情況下,尾部插入算法仍然需要遍歷,但是頭部插入算法只需要插入就可以,時間復雜度為O(1),算法更優。
④ 單鏈表刪除其中一個節點
刪除單鏈表的節點時,因為節點自身只保存有下一個節點的指針,并沒有指向上一個節點的指針,所以不能直接入手刪除節點,那么如何刪除單鏈表的節點呢?
方法是:設置二級指針(指向Timer類型指針的指針),通過遍歷鏈表的方式來尋找節點中next指針指向刪除節點的那個節點,代碼如下。
void timer_stop(struct Timer* handle){struct Timer** curr;for(curr = &head_handle; *curr; ) {struct Timer* entry = *curr;if (entry == handle) {*curr = entry->next;// free(entry);} elsecurr = &entry->next;}}
-
軟件
+關注
關注
69文章
5117瀏覽量
88923 -
定時器
+關注
關注
23文章
3287瀏覽量
117197
原文標題:MultiTimer,一款可無限擴展的軟件定時器
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
MCU定時器/計數器
TPS3435 納米靜態電流精密超時看門狗定時器數據手冊
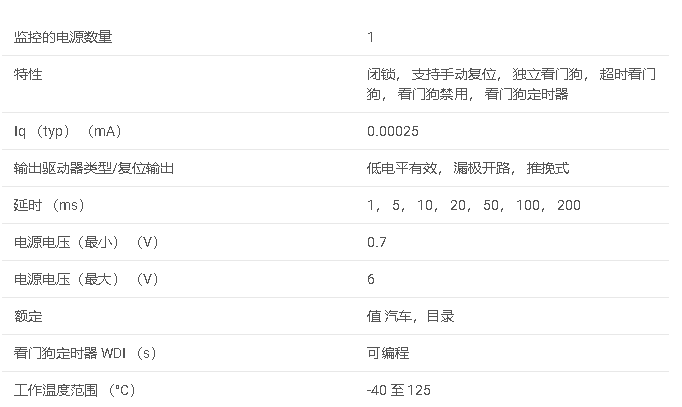
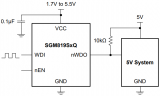
圣邦微電子SGM819SxQ車規級看門狗定時器電路特性與數據手冊分享
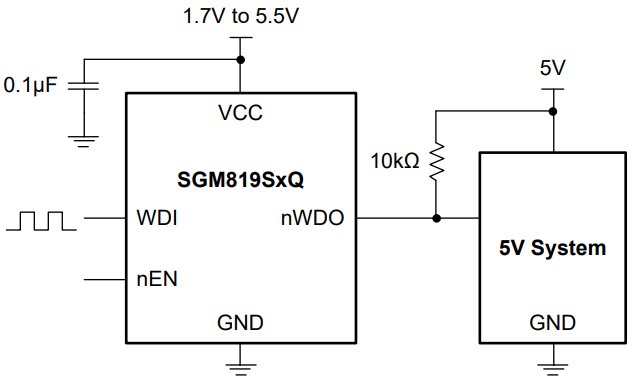
圣邦微電子車規級看門狗定時器電路SGM819SxQ特性與典型應用電路
定時器自動控制開關怎么設置
定時器的基本組成和工作模式
ESP8266的軟件定時器允許在user_init中定義兩個不同的定時器然后去定時兩個不同的操作嗎?
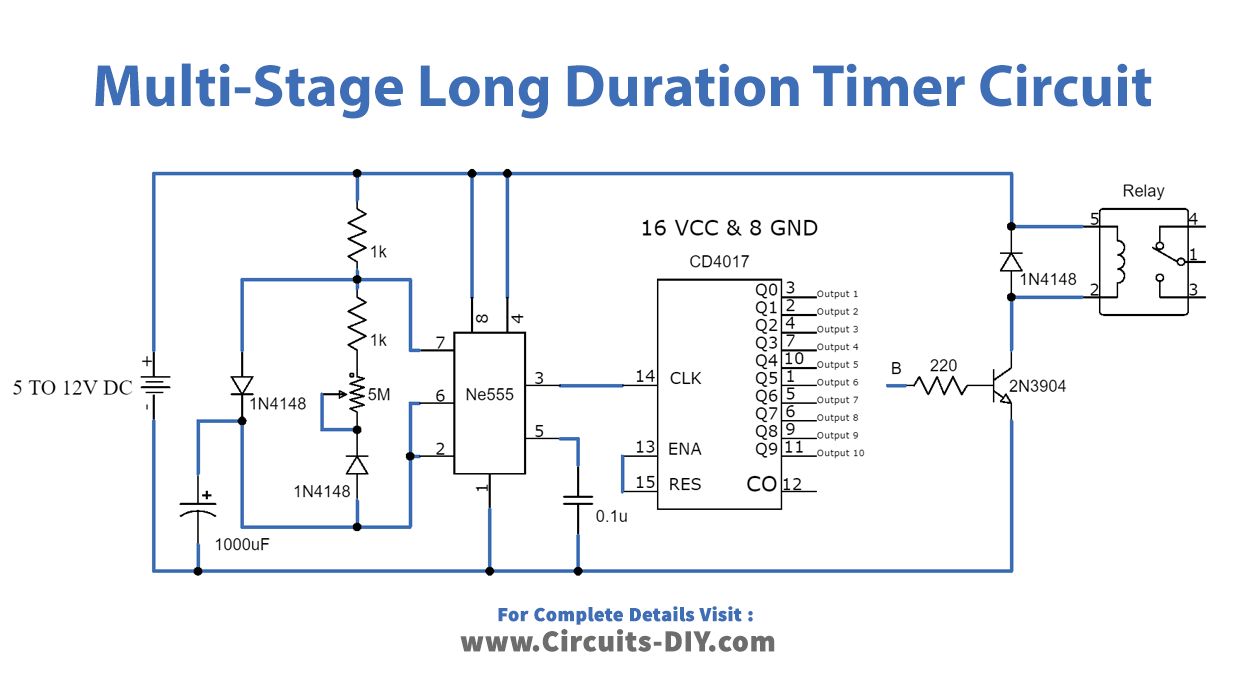
長持續時間定時器電路圖 時間定時器的工作原理和功能





 工商網監
工商網監
評論