") 作為隔離式柵極驅(qū)動器技術(shù)的基準(zhǔn)核心參數(shù)
作為隔離式柵極驅(qū)動器技術(shù)的基準(zhǔn)核心參數(shù)
您好,歡迎觀看第三個討論隔離式柵極驅(qū)動器的 TI 高精度實(shí)驗(yàn)室講座。 在本視頻中,我們將探討可以作為隔離式柵極驅(qū)動器技術(shù)的基準(zhǔn)核心參數(shù)。 我們將會檢查這些參數(shù)的數(shù)據(jù)表定義, 討論在隔離式和非隔離式驅(qū)動器中決定這些參數(shù)的機(jī)制, 并舉例說明這些參數(shù)將如何疊加影響系統(tǒng)性能。
在本講座中,我們關(guān)注的四個參數(shù)分別是傳播延遲、 脈沖持續(xù)時(shí)間失真、 部件對部件或通道對通道偏斜以及共模瞬態(tài)抗擾度。在上一節(jié)課中,這些參數(shù)是常見隔離式柵極驅(qū)動器應(yīng)用中最新出現(xiàn)的許多改進(jìn)的核心。
傳播延遲是指, 根據(jù)預(yù)期的行為, 從輸入超過上升或下降閾值到輸出達(dá)到上升值的 10% 或下降值的 90% 的總持續(xù)時(shí)間。 例如,輸出可能會直接對應(yīng)于輸入。 在這種情況下, 從低電平到高電平的傳播延遲即從輸入電壓超過上升閾值到輸出電壓達(dá)到最大值的 10% 的時(shí)間。而從高電平到低電平的傳播延遲則是從輸入電壓超過下降閾值到輸出電壓達(dá)到最大值的 90% 的時(shí)間。
如果輸出是反相的,那么該定義的唯一變化是,從低電平到高電平的傳播延遲現(xiàn)在取決于下降輸入閾值, 而從高電平到低電平的傳播延遲則取決于上升輸入閾值。 為了消除驅(qū)動強(qiáng)度或電源電壓造成的差異, 應(yīng)該在最小負(fù)載或空載且輸入和輸出都穩(wěn)定的電源電壓下測量傳播延遲。
傳播延遲是輸入與輸出之間的電路函數(shù)。 低側(cè)驅(qū)動器可實(shí)現(xiàn)不到 20 納秒的傳播延遲, 這是因?yàn)樗鼈兊膶?shí)現(xiàn)只需要非常簡單的電路。 半橋驅(qū)動器中則添加了速度較慢的高電壓電平轉(zhuǎn)換器以及一些去毛刺和濾波電路,以避免因噪聲觸發(fā)輸出。 這些都必然會造成總傳播延遲的升高,常見延遲時(shí)間可超過100 納秒。 低側(cè)與高側(cè)之間的延遲差異非常大, 以致于需要向低側(cè)添加一個單獨(dú)的延遲時(shí)鐘。
光電隔離器利用LED 將柵極驅(qū)動信號轉(zhuǎn)換為光信號,而光電晶體管或光電二極管等光敏電路則會檢測到該信號。正確驅(qū)動且具有最低附加寄生效應(yīng)的 LED可在幾十納秒甚至更短的時(shí)間內(nèi)接通和斷開。 通過適當(dāng)優(yōu)化內(nèi)部寄生、 跨阻抗放大器特性、LED 驅(qū)動強(qiáng)度和許多其他設(shè)計(jì)值,光電隔離器可以實(shí)現(xiàn)類似于電容式或變壓器式隔離器的傳播延遲,但成本較高。
更常見的是,這些設(shè)計(jì)值會被適當(dāng)放寬,以便以更具競爭力的價(jià)格實(shí)現(xiàn)幾百納秒的可接受傳播延遲。 電容式和變壓器式隔離器會在高頻載波上對它們的二進(jìn)制輸出狀態(tài)進(jìn)行編碼,這只需幾納秒甚至更短的時(shí)間。載波解調(diào)同樣可能只需要幾納秒時(shí)間,但是由于內(nèi)部邏輯延遲和去毛刺濾波,整體延遲會較長。
并非所有制造商都以相同的方式實(shí)施隔離調(diào)制解調(diào)器,即使他們使用的技術(shù)類似。也就是說,傳播延遲不是取決于隔離介質(zhì),而是取決于具有特定限制的介質(zhì)的使用技術(shù)。每個柵極驅(qū)動器 都會因工藝公差、 電源電壓變化和結(jié)溫變化而在傳播延遲方面存在一定變化。 通過精心設(shè)計(jì), 可以消除許多有效的工藝公差。
在應(yīng)用環(huán)境中,運(yùn)行溫度通常保持穩(wěn)定,而且許多部件還包括內(nèi)部調(diào)節(jié)器,以維持穩(wěn)定的運(yùn)行點(diǎn)。溫度變化通常會對漂移和傳播延遲產(chǎn)生最大影響。 穿過隔離層的高電壓應(yīng)用不會對隔離式驅(qū)動器產(chǎn)生顯著影響,因?yàn)楦綦x元件的物理屬性不會有顯著變化。因此,高頻傳輸特性不會受到干擾。相比之下,向非隔離式半橋驅(qū)動器的高側(cè)通道施加高電壓則可通過影響電平轉(zhuǎn)換晶體管的電容來影響傳播 延遲。
為了測量典型的傳播延遲,應(yīng)該在輸入引腳和輸出引腳處放置具有低電感接地鞘的示波器探針。探針應(yīng)事先得到補(bǔ)償,且探針和示波器都必須具有足夠的帶寬來測量輸入和輸出的上升沿和下降沿。為了實(shí)現(xiàn)最高精度,應(yīng)該事先通過可調(diào)電壓源找到大致的上升和下降閾值,具體做法為:小幅增加和減小輸入電壓,直至發(fā)現(xiàn)過渡。注意,這些閾值將會隨電源電壓和溫度的變化而變化。為了確保穩(wěn)定的內(nèi)部電源電壓,必須配備足夠的旁路電容器。
脈沖持續(xù)時(shí)間失真,或者許多數(shù)據(jù)表中所說的脈寬失真,是通過測量電平從低到高和從高到低時(shí)的傳播延遲并計(jì)算它們之間的絕對差值來定義的。由于該參數(shù)是通過絕對差值定義的,因此一個正值既可能代表向脈沖添加的最大持續(xù)時(shí)間,也可能代表從脈沖中截去的最大持續(xù)時(shí)間。一些制造商還可能會在指定該參數(shù)時(shí)不使用絕對差值,這時(shí)便無法區(qū)分脈沖展寬和脈沖截?cái)唷U堊屑?xì)檢查組件的說明書,以確定使用的是哪種定義方式。
柵極驅(qū)動器中的脈沖持續(xù)時(shí)間失真很大程度上取決于隔離介質(zhì)中的設(shè)計(jì)權(quán)衡。去毛刺濾波器具有顯著影響,因?yàn)樗鼤种票茸钚〗刂怪刀痰拿}沖。但是,由于其影響僅限于占空比極限值, 因此,產(chǎn)品說明書中的脈沖持續(xù)時(shí)間失真中通常不包含去毛刺濾波失真。 成本較低的光電隔離器 可能會承受較差的脈沖 持續(xù)時(shí)間失真,因?yàn)楣怆姍z測器中的 LED 的開啟和關(guān)閉 時(shí)間并不總是對稱的,且溫度越高越嚴(yán)重。光電隔離器的脈沖持續(xù)時(shí)間失真范圍為從幾百納秒到幾十納秒。
電容式和變壓器式隔離器存在脈沖持續(xù)時(shí)間失真是由于振蕩器計(jì)時(shí)精度、 隔離組件的傳輸線路特性和接收器上的檢測方案的變化。總體來說,每個因素可能對應(yīng)幾納秒的失真。 電容式和變壓器式隔離器中的脈沖持續(xù)時(shí)間失真通常為幾十納秒,有時(shí)甚至?xí)佟?/p>
為了測量脈沖持續(xù)時(shí)間失真,需要再現(xiàn)與傳播延遲相同的測試設(shè)置,并收集不同占空比下許多脈沖的數(shù)據(jù),直至脈沖持續(xù)時(shí)間與去毛刺濾波截止值相當(dāng)。 對于具有可編程死區(qū)時(shí)間的驅(qū)動器, 則必須忽略該特性。 統(tǒng)計(jì)收集和持續(xù)數(shù)據(jù)捕捉這兩種方法都可用于觀察脈沖持續(xù)時(shí)間失真。
部件對部件或通道對通道計(jì)時(shí)偏斜, 以下簡稱計(jì)時(shí)偏斜,是通過測量兩個部件或兩 通道所執(zhí)行的同一 操作的傳播延遲并找出兩個測量值之間的絕對差值來定義的。根據(jù)不同的制造商或慣例,該測量值具有不同的名稱, 例如延遲匹配或部件間差值。某些部件可能未標(biāo)出 部件對部件計(jì)時(shí)偏斜值。 在這些情況下, 偏斜上限 必然是最大 保證傳播延遲, 因?yàn)閭鞑パ舆t 最大值是沒有 傳播延遲的理想驅(qū)動器的 最壞情況偏離。
一般來說,具有相同溫度、電源電壓和鎖定碼的驅(qū)動器間將具有最低計(jì)時(shí)偏斜。因此,工藝、電壓和溫度上的任何變化都可能提高計(jì)時(shí)偏斜。不同批次和不同日期代碼的驅(qū)動器將會具有略微不同的特性。即使是同一批次的驅(qū)動器也會因在制造過程中選用了晶圓的不同位置而具有一定的參數(shù)擴(kuò)展。通道對通道計(jì)時(shí)偏斜則基本不存在這種問題,因?yàn)樵谶x擇接收器時(shí),會選擇來自同一批次且彼此間所選用晶圓位置最近的 一對接收器。
驅(qū)動器間的輸出電壓差異可通過傳播延遲變化來影響偏斜,盡管在某種程度上,片上調(diào)節(jié)器可用于限制較低電壓邏輯元件的 影響。但是,大多數(shù)偏斜都來自驅(qū)動器或通道間的溫度差異。即使是完全相同的驅(qū)動器,功耗以及來自布局和氣流的熱影響也有可能完全不同。對于計(jì)時(shí)偏斜關(guān)鍵型應(yīng)用,必須努力匹配驅(qū)動器的溫度、電源電壓和批次代碼。計(jì)時(shí)偏斜的測試條件可能會與應(yīng)用環(huán)境中的條件大不相同。
為了測量計(jì)時(shí)偏斜,應(yīng)該在要測量的兩個部件或通道的輸入引腳和輸出引腳處放置具有低電感接地鞘的示波器探針。所有其他條件,包括輸入路徑的長度,都應(yīng)該與數(shù)據(jù)表中的測量條件相同,但是對于生產(chǎn)測試,這些條件應(yīng)該與應(yīng)用環(huán)境中的最壞情況差異相匹配。上升沿應(yīng)僅與上升沿比較,下降沿則應(yīng)僅與下降沿比較,所有這些都只針對具有相同部件號的部件或同一部件內(nèi)的通道。同樣,統(tǒng)計(jì)收集和持續(xù)數(shù)據(jù)捕捉可幫助我們找到最壞情況值。
共模瞬態(tài)抗擾度, 簡稱 CMTI, 是指瞬態(tài)穿過隔離層以破壞驅(qū)動器輸出狀態(tài)所需的最低偏斜率。在高偏斜率下,瞬態(tài)會以電容耦合的方式穿過隔離層,并將電流注入控制電路, 導(dǎo)致輸出狀態(tài)暫時(shí)被破壞。 在應(yīng)用中,這種瞬態(tài)通常是由開關(guān)節(jié)點(diǎn)上的高 DV/DT 引起的,有時(shí)也有可能是由晶體管的雪崩擊穿引起的。
有時(shí),CMTI 分為靜態(tài)和動態(tài) CMTI。靜態(tài) CMTI 允許將輸入直接連接到基準(zhǔn)平面,這種情況下,瞬態(tài)更不容易在內(nèi)部電路中生成錯誤信號。動態(tài) CMTI 通常使用具有較高阻抗的微控制器或其他來源來驅(qū)動輸入,這種情況下,注入的 瞬態(tài)電流更容易影響輸出狀態(tài)。在瞬態(tài)條件被清除且向控制電路的電流注入停止后,輸出將會返回到預(yù)期狀態(tài)。
光電隔離器具有可使瞬態(tài)遠(yuǎn)離關(guān)鍵內(nèi)部電路的內(nèi)部屏蔽。但是這種屏蔽會產(chǎn)生電容,因而可將共模電流注入驅(qū)動的 LED。最小化這些電容的許多挑戰(zhàn)都是機(jī)械 方面的,而且為了達(dá)到可接受的 CMTI 水平,必須對封裝進(jìn)行精心設(shè)計(jì)。變壓器式隔離器主要受變壓器初級側(cè)和次級側(cè)之間的寄生電容的影響,但是設(shè)計(jì)者可通過調(diào)節(jié)線圈距離和放置方式來調(diào)節(jié)寄生值。
電容式隔離器會不可避免地通過通信介質(zhì)直接耦合瞬態(tài),因此必須通過精心設(shè)計(jì)來緩解這一問題。設(shè)計(jì)者使用內(nèi)部裸片區(qū)域來策略性地放置屏蔽層和旁路電容,從而盡可能使瞬態(tài)遠(yuǎn)離關(guān)鍵信號。由于這些結(jié)構(gòu)都是在裸片上構(gòu)建的,因此它們的有效性和 驅(qū)動器的 CMTI 額定值將受工藝、電壓和溫度變化的影響。
共模瞬態(tài)抗擾度的測量可能會非常復(fù)雜。首先,必須設(shè)計(jì)或選擇一個可調(diào)瞬態(tài)發(fā)生器。例如開關(guān)轉(zhuǎn)換器的開關(guān)節(jié)點(diǎn)、基于晶體管的馬克思發(fā)生器或其他一些電氣快速瞬態(tài)發(fā)生器。第二,必須測量瞬態(tài)。
由于帶寬與上升時(shí)間成反比,因此需要使用快速探針和高速示波器來測量快速瞬態(tài)。此外,還需要考慮探針電壓額定值,以應(yīng)對較高的電壓。最后,必須對輸出狀態(tài)進(jìn)行監(jiān)控,以便發(fā)現(xiàn)其變化。
在設(shè)計(jì) CMTI 測試時(shí),應(yīng)確保驅(qū)動器輸出接地點(diǎn)始終與示波器保持在相同的接地上。為了將驅(qū)動器接地與示波器接地分開,需要使用差動探針或隔離探針, 但是差動探針對快速高電壓瞬態(tài)的共模抑制能力較差,這會導(dǎo)致噪聲比所需信號還高。而具有所需高共模瞬態(tài)抗擾度的隔離探針則又非常昂貴。
下面我們以碳化硅 MOSFET 半橋?yàn)槔齺韺Ρ局v座的主題進(jìn)行總結(jié)。假定對于漏極電流、負(fù)載電感和柵極驅(qū)動特性的組合,我們可以預(yù)期不低于 25 納秒而又不高于 35 納秒的開啟和關(guān)閉時(shí)間。
我們還可以預(yù)期上升和下降時(shí)間分別為 10 納秒和 8 納秒。 這些參數(shù)在溫度變化時(shí)相對穩(wěn)定,且 800 伏的總線電壓保持不變。 如果我們考慮使用兩個具有這些特性的 TI ISO5852S 驅(qū)動器、兩個具有這些特性的變壓器式驅(qū)動器,或者兩個具有這些特性的光電隔離器,那么該系統(tǒng)在正常溫度下所需的最小死區(qū)時(shí)間是多少?
這些例子都選擇的是價(jià)格比較合理的組件。 假設(shè)每個驅(qū)動器的驅(qū)動強(qiáng)度都足以滿足 35 納秒的開啟和關(guān)閉時(shí)間。在所有情況下,電平從低到高與從高到低情況下的傳播延遲都密切匹配。這些公式給出了在防止電橋擊穿的最低條件下,用于計(jì)算偏斜和傳播延遲的方式。
對于電容式驅(qū)動器 ISO5852S, 基于部件對部件偏斜的所需最低死區(qū)時(shí)間為 40納秒,但是實(shí)際值通常要稍微高于該值,以便針對錯誤留出一定的余量。使用傳播延遲時(shí),最低死區(qū)時(shí)間在加上余量后約等于110 納秒, 因?yàn)樽畹蛡鞑パ舆t是未知的,且絕不可能低于零納秒。如果您發(fā)現(xiàn)傳播延遲低于零的驅(qū)動器,請聯(lián)系我們。
對于變壓器式驅(qū)動器,沒有給出部件對部件偏斜。根據(jù)數(shù)據(jù)表中給出的變形,我們可以推斷,在相同電壓下,兩個部件在各種溫度下的偏斜不會超過 60 納秒。 因此在加上余量后,理論上所需的最低死區(qū) 時(shí)間為 70 納秒。
使用傳播延遲時(shí),我們可以確定各種溫度下的絕對延遲差值為 90 納秒,再加上余量,則所需的最低死區(qū)時(shí)間為 100 納秒。對于光電隔離器,我們給出了各種溫度下的部件對部件偏斜和傳播延遲。使用部件對部件偏斜時(shí)所需的最低死區(qū)時(shí)間為 360 納秒,其中包括余量。而使用傳播延遲時(shí),此估計(jì)值將上升至 410 納秒,其中包括余量。
光電隔離器往往要比現(xiàn)代的大多數(shù)隔離式柵驅(qū)動器慢。對于碳化硅系統(tǒng)來說,這是一個很大的缺點(diǎn)。具有增強(qiáng)的計(jì)時(shí)特性的光電隔離器確實(shí)存在,但價(jià)格昂貴。
那么 CMTI 呢?如果上升和下降時(shí)間分別為10 納秒和 8 納秒,總線電壓為 800 伏,則最壞的偏斜率 為每納秒 100 伏。注意,這個值在電容式隔離柵極驅(qū)動器的 額定值范圍內(nèi),但是超出了變壓器式驅(qū)動器的最大值,且遠(yuǎn)遠(yuǎn)高于光電隔離器的保證最低值。為了能夠放心地使用變壓器式驅(qū)動器或光電隔離器,必須使用外部柵極電阻器來縮短上升和下降時(shí)間,從而使偏斜率在組件的限制范圍內(nèi)。 因此,這可能會違背開啟和關(guān)閉 時(shí)間假設(shè),導(dǎo)致我們需要重新計(jì)算傳播延遲數(shù)據(jù)。
在接下來的講座中,我們將簡要討論柵極驅(qū)動器應(yīng)用電路所面臨的常見挑戰(zhàn),以及為了應(yīng)對這些問題而設(shè)計(jì)的一些特性。本視頻到此結(jié)束。謝謝觀看。請嘗試完成測驗(yàn)以檢查您對本視頻內(nèi)容的理解。
審核編輯:何安
-
電源管理
+關(guān)注
關(guān)注
116文章
6397瀏覽量
145766
發(fā)布評論請先 登錄
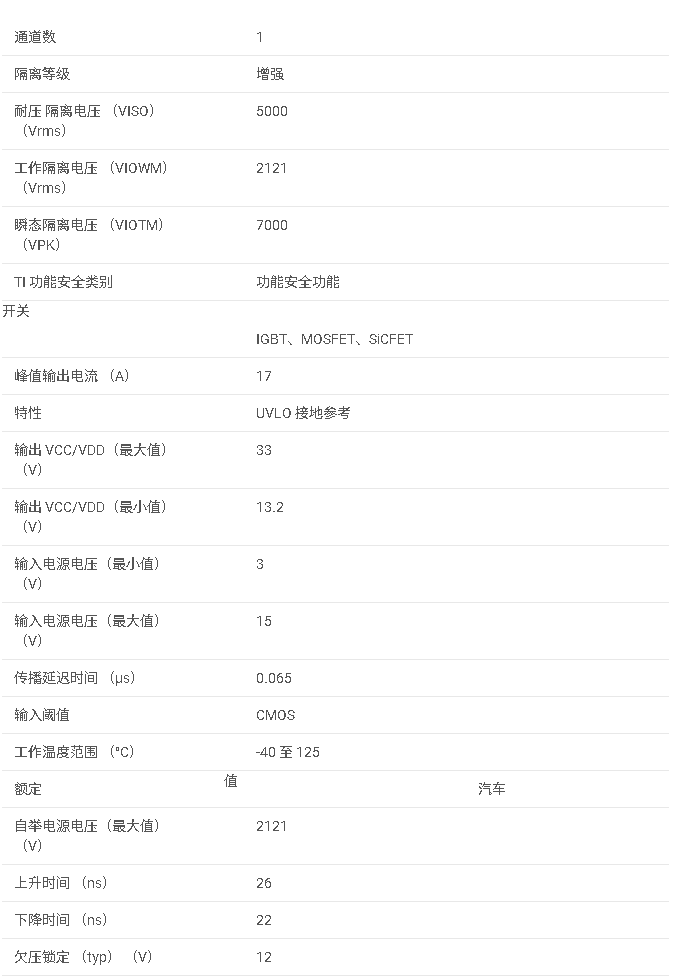
UCC5390-Q1 汽車級 17-A 5kv RMS 單通道隔離式柵極驅(qū)動器數(shù)據(jù)手冊
川土微電子發(fā)布CA-IS3212單通道隔離式柵極驅(qū)動器

采用 LLC 拓?fù)浣Y(jié)構(gòu)設(shè)計(jì)隔離式柵極驅(qū)動器電源,低成本 LLC 轉(zhuǎn)換器的設(shè)計(jì)指南
電隔離柵極驅(qū)動器的隔離能力評估

電隔離柵極驅(qū)動器選型指南
適用于UCC2122x隔離式柵極驅(qū)動器的共模瞬態(tài)抗擾度(CMTI)

光兼容隔離式柵極驅(qū)動器的輸入電阻選擇指南
UCC14240-Q1 簡化了隔離式柵極驅(qū)動器的 HEV、EV 偏置電源設(shè)計(jì)
使用隔離式 IGBT 和 SiC 柵極驅(qū)動器的 HEV/EV 牽引逆變器設(shè)計(jì)指南
技術(shù)分享 柵極驅(qū)動器及其應(yīng)用介紹
在電機(jī)驅(qū)動器的UCC23513光兼容隔離式柵極驅(qū)動器中實(shí)現(xiàn)分立式 DESAT
級聯(lián)兩個TPSI3050隔離式開關(guān)驅(qū)動器,以增加柵極驅(qū)動電壓





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論