") TI eSMO庫Fsmopos和Gsmopos參數(shù)解析
TI eSMO庫Fsmopos和Gsmopos參數(shù)解析
作者:Hardy Zhou
在電機無感控制算法方面,TI提供了eSMO滑模觀測器來計算電機轉(zhuǎn)子角度。 在應(yīng)用方面,TI提供了eSMO lib文件和相關(guān)文檔說明eSMO的使用,但是在使用過程中,可能沒法從相關(guān)文檔上理解Fsmopos和Gsmopos的含義,不方便調(diào)試。 因此本篇主要推導(dǎo) TI eSMO電流計算公式,并導(dǎo)出Fsmopos和Gsmopos(分別簡稱F和G)公式,同時我們可以從推導(dǎo)出的公式看到TI 的計算和其他F和G的計算方式的差別,加深理解和熟練應(yīng)用。
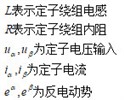
PMSM在靜止α、β坐標(biāo)系下的數(shù)學(xué)模型如下:
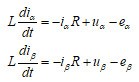 (1)
(1)
TI eSMO滑模觀測器結(jié)構(gòu)數(shù)學(xué)模型如下
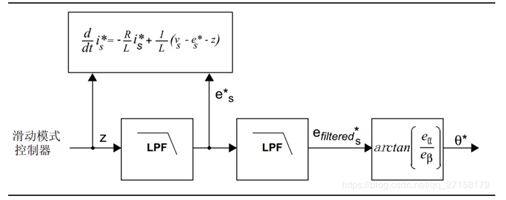
從結(jié)構(gòu)上看,比較清晰明了,使用開關(guān)切換函數(shù)估算反電動勢,從而求得電機轉(zhuǎn)子角度。
從而我們可以得到以下的觀測器表達(dá)式
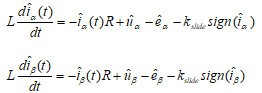
其中
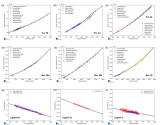
基于以上公式,我們在α軸上求解eSMO電流,類似地可以求得β軸電流公式。

電流在時域下的解為:
對應(yīng)離散時間Ts的電流解為
 (1)
(1)
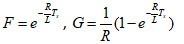
從而得到:
 (2)
(2)
(2) – (1)得到
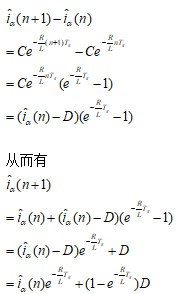
從而可以得到
注意: 如果離散時間Ts足夠小,可以使用 近似。
近似。
那么就有
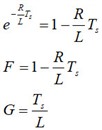
這樣就跟其他非指數(shù)形式的表達(dá)式一樣。
審核編輯:金巧
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
嵌入式處理
+關(guān)注
關(guān)注
0文章
341瀏覽量
10255 -
電機
+關(guān)注
關(guān)注
143文章
9247瀏覽量
148316
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
ip6806芯片的詳細(xì)參數(shù)解析
本文深入解析了英集芯IP6806無線充電發(fā)射端控制芯片的技術(shù)細(xì)節(jié),包括其基礎(chǔ)架構(gòu)、核心參數(shù)、功能特性、應(yīng)用場景以及智能控制和安全防護(hù)功能。其輸入電壓范圍寬,輸出功率高,效率高,過壓、過流、過溫保護(hù)機制完善,兼容性強。

名單公布!【書籍評測活動NO.60】運算放大器參數(shù)解析與LTspice應(yīng)用仿真
和電路分析方法。
第2章:參考實際放大器的數(shù)據(jù)手冊,使用超大篇幅解析全部參數(shù)的意義、注意事項,并配合精典案例和仿真電路,幫助讀者全面理解參數(shù)的意義與運用。
第3章:介紹了儀表放大器、跨阻放大器、全
發(fā)表于 04-21 16:18
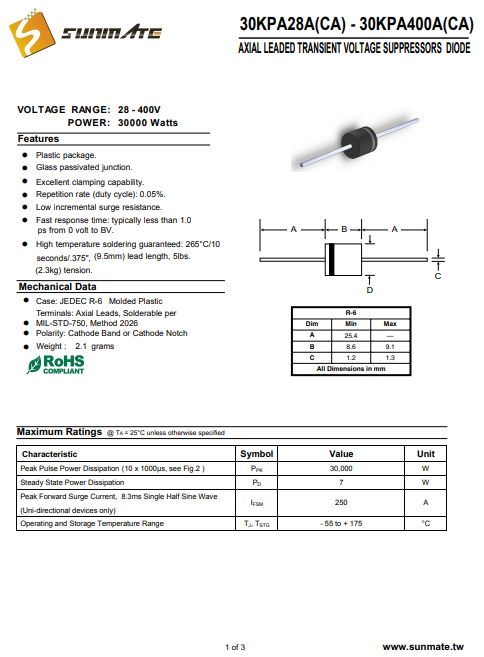
從參數(shù)到應(yīng)用,30KPA33A瞬態(tài)抑制二極管全解析
從參數(shù)到應(yīng)用,30KPA33A瞬態(tài)抑制二極管全解析
利用Phase Lab鎳基摩爾體積數(shù)據(jù)庫實現(xiàn)材料物性參數(shù)的精準(zhǔn)預(yù)測
? Phase Lab?鎳基摩爾體積數(shù)據(jù)庫 實現(xiàn)材料物性參數(shù)的可靠預(yù)測 摩爾體積、密度、熱膨脹系數(shù)、彈性常數(shù)以及熱導(dǎo)率等是材料的基本物理性質(zhì),針對這些物理性質(zhì)建立數(shù)據(jù)庫是材料設(shè)計基礎(chǔ)數(shù)據(jù)庫
TINA-TI軟件里面的非線性變壓器選項里面的參數(shù)怎么設(shè)置?
你們的TINA-TI軟件里面的非線性變壓器選項里面的參數(shù)怎么設(shè)置,有很大的疑問啊
1.我們要自己輸入變壓器的磁心參數(shù),變壓器的截面積AE值,有效磁路長度,但你們里面怎么沒有磁導(dǎo)率的選項
2.你們
發(fā)表于 12-16 06:20
Python庫解析:通過庫實現(xiàn)代理請求與數(shù)據(jù)抓取
在Python中,有多個庫可以幫助你實現(xiàn)代理請求和數(shù)據(jù)抓取。這些庫提供了豐富的功能和靈活的API,使得你可以輕松地發(fā)送HTTP請求、處理響應(yīng)、解析HTML/XML/JSON數(shù)據(jù),以及進(jìn)行復(fù)雜的網(wǎng)絡(luò)操作。

Oracle數(shù)據(jù)恢復(fù)—異常斷電后Oracle數(shù)據(jù)庫啟庫報錯的數(shù)據(jù)恢復(fù)案例
Oracle數(shù)據(jù)庫的在線文件,需要恢復(fù)zxfg用戶的數(shù)據(jù)。
Oracle數(shù)據(jù)庫恢復(fù)方案:
檢測數(shù)據(jù)庫故障;嘗試掛起并修復(fù)數(shù)據(jù)庫;解析

一種常用嵌入式開發(fā)代碼庫
使用開源協(xié)議:GPL-2.0varch簡介varch(we-architecture,意為我們的框架庫)是嵌入式C語言常用代碼模塊庫,包含了嵌入式中常用的算法庫,數(shù)據(jù)結(jié)構(gòu)(容器)庫,解析

陀螺儀LSM6DSOW開發(fā)(5)----MotionFX庫解析空間坐標(biāo)
本文將探討如何使用MotionFX庫解析空間坐標(biāo)。MotionFX庫是一種用于傳感器融合的強大工具,可以將加速度計、陀螺儀和磁力計的數(shù)據(jù)融合在一起,實現(xiàn)精確的姿態(tài)和位置估計。本文將介紹如何初始化

TINA-TI里的運放SPICE模型包含有運放的差分、共模輸入電容參數(shù)嗎?
利用TINA-TI進(jìn)行TIA電路的穩(wěn)定性分析,以生成開環(huán)增益曲線和噪聲增益曲線,所用APD的結(jié)電容為2.2pF,那么請問圖中的輸入電容CIN應(yīng)該設(shè)為2.2pF?還是
發(fā)表于 08-12 08:13
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(8)----中斷獲取FIFO數(shù)據(jù)并應(yīng)用MotionFX庫解析空間坐標(biāo)
本文將探討如何使用中斷機制獲取FIFO數(shù)據(jù)并應(yīng)用MotionFX庫解析空間坐標(biāo)。MotionFX庫是一種用于傳感器融合的強大工具,可以將加速度計、陀螺儀和磁力計的數(shù)據(jù)融合在一起,實現(xiàn)精確的姿態(tài)和位置
驅(qū)動LSM6驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(7)----MotionFX庫解析空間坐標(biāo)DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采
本文將探討如何使用MotionFX庫解析空間坐標(biāo)。MotionFX庫是一種用于傳感器融合的強大工具,可以將加速度計、陀螺儀和磁力計的數(shù)據(jù)融合在一起,實現(xiàn)精確的姿態(tài)和位置估計。本文將介紹如何初始化
陀螺儀LSM6DSV16X與AI集成(9)----中斷獲取FIFO數(shù)據(jù)并應(yīng)用MotionFX庫解析空間坐標(biāo)
本文將探討如何使用中斷機制獲取FIFO數(shù)據(jù)并應(yīng)用MotionFX庫解析空間坐標(biāo)。MotionFX庫是一種用于傳感器融合的強大工具,可以將加速度計、陀螺儀和磁力計的數(shù)據(jù)融合在一起,實現(xiàn)精確的姿態(tài)和位置

陀螺儀LSM6DSV16X與AI集成(8)----MotionFX庫解析空間坐標(biāo)
本文將探討如何使用MotionFX庫解析空間坐標(biāo)。MotionFX庫是一種用于傳感器融合的強大工具,可以將加速度計、陀螺儀和磁力計的數(shù)據(jù)融合在一起,實現(xiàn)精確的姿態(tài)和位置估計。本文將介紹如何初始化





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論