") 全面剖析大眾和福特的自動(dòng)駕駛系統(tǒng)
全面剖析大眾和福特的自動(dòng)駕駛系統(tǒng)

鑒于自動(dòng)駕駛開(kāi)發(fā)成本高,大眾和福特投資了合資公司Argo AI(進(jìn)入ARGO AI微門(mén)戶(hù))進(jìn)行聯(lián)合開(kāi)發(fā)。2019年7月,經(jīng)過(guò)數(shù)月的談判之后,大眾同意以 70 億美元的估值向 Argo 注資 26 億美元。其中,包括 10 億美元現(xiàn)金以及價(jià)值 16 億美元的大眾自動(dòng)駕駛子公司 AID(Autonomous Intelligent Driving)。
作為交易的一部分,大眾需要從福特手里收購(gòu)價(jià)值 5 億美元的 Argo AI 股份。2020年6月2日,交易完成。大眾將與福特持有相同的股份,剩余部分則歸Argo AI公司員工所有。Argo AI公司的董事會(huì)也會(huì)由5人增至7人,其中大眾和福特各占2個(gè)席位,另外的3個(gè)席位則歸屬于Argo AI自己。
Argo AI與大多數(shù)自動(dòng)駕駛公司將總部放在加州也不一樣,其總部位于匹茲堡,美國(guó)汽車(chē)工業(yè)心臟地帶,而不是加州的高科技地帶。2016 年9月,前 Google 員工 Salesky 和前 Uber 員工 Peter Rander 聯(lián)合創(chuàng)辦了 Argo AI。2017年2月,福特公司10 億美元注資 Argo AI。分析Argo AI的自動(dòng)駕駛系統(tǒng)就等同于分析大眾和福特的自動(dòng)駕駛系統(tǒng)。
2021年4月,Argo AI發(fā)布了安全報(bào)告書(shū)Safety Report。大眾(進(jìn)入大眾微門(mén)戶(hù))和福特(進(jìn)入福特微門(mén)戶(hù))表示大約在2024年有利用Argo AI技術(shù)的自動(dòng)駕駛車(chē)輛量產(chǎn)。
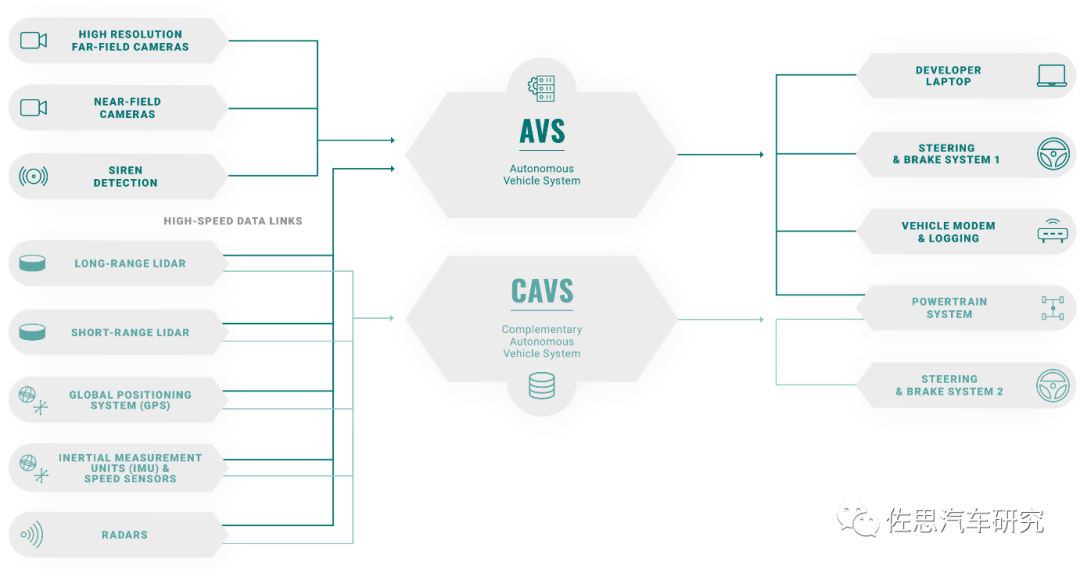
Argo AI自動(dòng)駕駛架構(gòu)圖,圖片來(lái)源:Argo AI
可以看出和豐田(進(jìn)入豐田微門(mén)戶(hù))L4一樣,也是兩套獨(dú)立的轉(zhuǎn)向與制動(dòng)系統(tǒng)。還特別點(diǎn)出了加了IMU和速度傳感器,應(yīng)該不是像特斯拉之類(lèi)量產(chǎn)車(chē)上不到1美元的IMU(博世在這個(gè)領(lǐng)域市場(chǎng)占有率估計(jì)有90%)。和Waymo一樣,也有針對(duì)救護(hù)車(chē)、消防車(chē)、警車(chē)的緊急鳴笛探測(cè)系統(tǒng)。
Argo AI的自動(dòng)駕駛原型車(chē)輛在2021年進(jìn)入第四代。
圖片來(lái)源:Argo AI
Argo AI的第四代自動(dòng)駕駛原型車(chē)輛使用4個(gè)激光雷達(dá),9個(gè)毫米波雷達(dá),12個(gè)攝像頭。一個(gè)是Velodyne(進(jìn)入Velodyne微門(mén)戶(hù))的128線遠(yuǎn)距離激光雷達(dá),3個(gè)自行開(kāi)發(fā)的短距離激光雷達(dá),兩個(gè)前向,一個(gè)后向。
短距離激光雷達(dá)使用SPAD單光子接收陣列,因?yàn)锳rgoAI在2017年收購(gòu)了激光雷達(dá)初創(chuàng)公司Princeton Lightwave(進(jìn)入Princeton Lightwave微門(mén)戶(hù))(該公司是SPAD的擁躉),具體交易額不詳,估計(jì)在1億美元上下。3個(gè)前向毫米波雷達(dá),其中一個(gè)位于車(chē)頂。4個(gè)側(cè)向毫米波雷達(dá),位于輪眉上方,隱藏在車(chē)內(nèi),外觀上看不出來(lái)。
應(yīng)該是4個(gè)級(jí)聯(lián)的77-81GHz高分辨率毫米波雷達(dá)。兩個(gè)后向毫米波雷達(dá)。兩個(gè)車(chē)輪處的短距離攝像頭,一個(gè)立體雙目攝像頭,七個(gè)頂置攝像頭,一個(gè)后向攝像頭。
圖片來(lái)源:Argo AI
與Argo AI的第三代自動(dòng)駕駛原型車(chē)輛相比,用128線激光雷達(dá)代替了原來(lái)的兩個(gè)堆疊的32線激光雷達(dá)VLP-32C。大幅增加了毫米波雷達(dá)和近距離激光雷達(dá),主要的視覺(jué)和激光雷達(dá)部分實(shí)際變換不大。7個(gè)200萬(wàn)像素?cái)z像頭呈環(huán)狀分布,幀率30Hz,一個(gè)500萬(wàn)像素雙目攝像頭,幀率5Hz,基線寬29.86厘米。
Argo AI的第四代自動(dòng)駕駛原型車(chē)輛正面照,立體雙目與毫米波雷達(dá)在頂部自動(dòng)駕駛傳感器系統(tǒng)的正中間。
Argo AI最強(qiáng)調(diào)的是移動(dòng)目標(biāo)的行動(dòng)軌跡做出預(yù)測(cè),就像人類(lèi)駕駛的預(yù)判,這樣才是真正的自動(dòng)駕駛,才能提高安全性。也就是MODT(Moving Object Detection and Tracking)。同時(shí)Argo AI也是美國(guó)唯二的使用自制高精度地圖的自動(dòng)駕駛原型車(chē),另外一家是安波福(進(jìn)入安波福微門(mén)戶(hù))。Argo AI的數(shù)據(jù)集名為Argoverse。
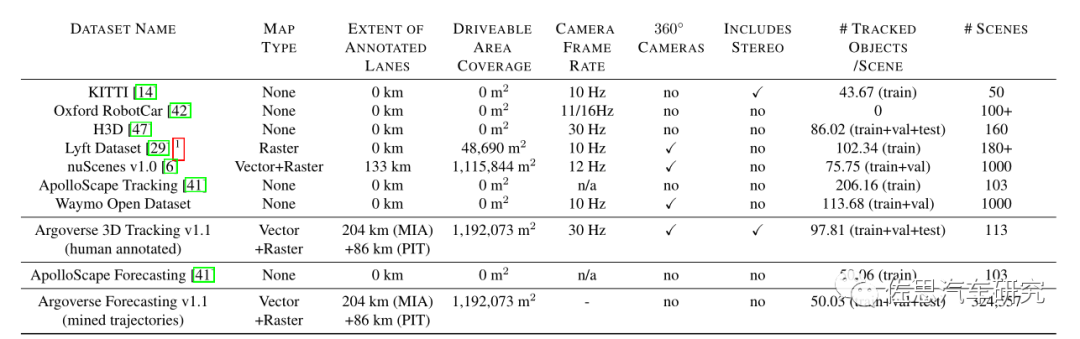
Argoverse與其他數(shù)據(jù)集的對(duì)比,
圖片來(lái)源:Argo AI
Argo AI用激光雷達(dá)鳥(niǎo)瞰圖(Bird Eyed View)視覺(jué)化,車(chē)輛或其他目標(biāo)用3D框標(biāo)注,用雙目計(jì)算出可行駛區(qū)域,并用青色表示,用黃線表示邊界。即道路表面語(yǔ)義分割,Road Surface Freespace Segmentation,分出路面、移動(dòng)物體(障礙物)、固定不動(dòng)的(Solid)。通常用基于概率的占用網(wǎng)格加動(dòng)態(tài)規(guī)劃(Dynamic Programming)的算法獲取。與豐田的L4系統(tǒng)基本沒(méi)差別。
Argo AI用高精度地圖移除地面靜態(tài)物體。有了高精度地圖,再配合激光雷達(dá)鳥(niǎo)瞰圖,可以準(zhǔn)確地移除基于地面的靜止目標(biāo),減輕自動(dòng)駕駛的感知計(jì)算復(fù)雜程度,更容易識(shí)別出重要的運(yùn)動(dòng)目標(biāo)。如果地面有坡度,這種算法難度較高,Argo AI用準(zhǔn)確的高度匹配和3D地圖解決這個(gè)問(wèn)題,最終效果如右邊一列。
Argo AI用激光雷達(dá)和攝像頭自己制作了高精度地圖,左圖為激光雷達(dá)與攝像頭融合圖,右圖為高精度地圖。
Argo AI的驕傲之處是移動(dòng)目標(biāo)的軌跡預(yù)測(cè),Argo AI在YouTube上兩段視頻有直觀表示。
在移動(dòng)目標(biāo)軌跡運(yùn)動(dòng)預(yù)測(cè)中,Argoverse可以預(yù)測(cè)將來(lái)某個(gè)時(shí)間跟蹤對(duì)象的位置。許多車(chē)輛的運(yùn)動(dòng)相對(duì)無(wú)意義-在給定的幀中,大多數(shù)汽車(chē)都以幾乎恒定的速度停泊或行駛。這樣的軌跡很難代表真實(shí)的預(yù)測(cè)挑戰(zhàn)。Argo AI想要一個(gè)具有多種場(chǎng)景的基準(zhǔn)測(cè)試,例如交叉路口,車(chē)道合并車(chē)輛減速,轉(zhuǎn)彎后加速,道路上的行人停車(chē)等。為了對(duì)這些有趣的場(chǎng)景進(jìn)行足夠的采樣,Argo跟蹤了邁阿密和匹茲堡1006個(gè)行駛小時(shí)內(nèi)的物體,并找到了Argo感興趣的車(chē)輛在那320小時(shí)內(nèi)的行為。主要包括(1)在十字路口,要么(2)左轉(zhuǎn)或右轉(zhuǎn),(3)轉(zhuǎn)向相鄰車(chē)道,或者(4)在交通繁忙時(shí) 。Argo總共收集了324,557個(gè)5秒序列,并將其用于預(yù)測(cè)基準(zhǔn)。
每個(gè)序列都包含以10 Hz采樣的每個(gè)被跟蹤物體的2D鳥(niǎo)瞰中心。每個(gè)序列中的“焦點(diǎn)”對(duì)象始終是車(chē)輛,但是其他跟蹤的對(duì)象可以是車(chē)輛,行人或自行車(chē)。它們的軌跡可用作“社會(huì)(Social)”預(yù)測(cè)模型的上下文。324,557個(gè)序列分為205,942個(gè)訓(xùn)練序列,39,472個(gè)驗(yàn)證和78,143個(gè)測(cè)試序列。每個(gè)序列都有一個(gè)具有挑戰(zhàn)性的軌跡。訓(xùn)練、驗(yàn)證和測(cè)試序列取自城市的不相連部分,即每個(gè)城市的大約八分之一和四分之一被分別留作驗(yàn)證和測(cè)試數(shù)據(jù)。該數(shù)據(jù)集遠(yuǎn)大于可以從公共可用的自動(dòng)駕駛數(shù)據(jù)集中挖掘的數(shù)據(jù)集。如此規(guī)模的數(shù)據(jù)很吸引人,因?yàn)樗刮覀兡軌蚩吹胶币?jiàn)的行為并訓(xùn)練復(fù)雜的模型,但它太大了,無(wú)法詳盡地驗(yàn)證開(kāi)采軌跡的準(zhǔn)確性,因此,數(shù)據(jù)中固有一些噪聲和誤差。
Argo AI使用關(guān)聯(lián)速度( Constant Velocity),最小近鄰(NN)和LSTM來(lái)做預(yù)測(cè)。給定車(chē)輛軌跡的過(guò)去輸入坐標(biāo)Vi ,其中對(duì)于時(shí)間步長(zhǎng)t的 X,預(yù)測(cè)時(shí)間步長(zhǎng)T的未來(lái)坐標(biāo) Y。對(duì)于汽車(chē),5 s足以捕獲軌跡的顯著部分,例如。過(guò)十字路口。Argo將運(yùn)動(dòng)預(yù)測(cè)任務(wù)定義為觀察20個(gè)過(guò)去的幀(2 s),然后預(yù)測(cè)未來(lái)的30個(gè)幀(3 s)。每個(gè)預(yù)測(cè)任務(wù)可以按相同順序利用其他對(duì)象的軌跡來(lái)捕獲交通環(huán)境并為空間環(huán)境映射信息。

圖片來(lái)源:Argo AI
Argo使用最小平均距離誤差A(yù)verage Displacement Error (minADE)、最小最終距離誤差 minimum Final Displacement Error (minFDE)可行駛區(qū)域服從度、DAC (Drivable Area Compliance)、Miss Rate (MR,閾值為1米) 來(lái)評(píng)估預(yù)測(cè)效果。
minADE指的是軌跡的ADE,具有最小FDE,而不是最小ADE,因?yàn)橐u(píng)估單個(gè)最佳預(yù)測(cè)。就是說(shuō),minADE誤差可能不是一個(gè)足夠的指標(biāo)。K指一條路徑上的預(yù)測(cè)次數(shù)。如果只預(yù)測(cè)一次,LSTM效果比較好,預(yù)測(cè)多次,NN加地圖性能更好。無(wú)論哪一種,加了地圖之后性能都更好。
Argo AI在6個(gè)城市展開(kāi)測(cè)試。每個(gè)城市都有獨(dú)特之處。匹茲堡,主要是有起伏的上下坡路、狹窄街道、眾多橋梁、五條道路的大型立交橋。底特律,四季分明,車(chē)道很寬,林蔭道很多,中央車(chē)道掉頭多。加州的PaloAlto,富豪云集,多散步、跑步和騎行者。
度假勝地佛羅里達(dá)的邁阿密則是什么類(lèi)型的交通元素都有包括輕便摩托車(chē)(mopeds)、滑板車(chē)(scooter)、滑輪者rollerbladers、平衡車(chē)hoverboards,還有重型卡車(chē)和公交車(chē)以及校車(chē)。德州奧斯汀跟邁阿密近似。華盛頓,交通堵塞嚴(yán)重,交通管制復(fù)雜,環(huán)島眾多。與Waymo主要在行人稀少,路況簡(jiǎn)單的鳳凰城比,Argo AI的難度要高很多,Argo AI認(rèn)為這6個(gè)城市覆蓋了美國(guó)的各種路況和氣候。
除了公開(kāi)道路,Argo AI還有一個(gè)50英畝即大約20萬(wàn)平米的自建封閉測(cè)試園區(qū),園區(qū)內(nèi)有16公里長(zhǎng)的道路。
圖片來(lái)源:Argo AI
Argo AI當(dāng)然也開(kāi)發(fā)了仿真工具做虛擬測(cè)試。
Argo AI給出了自動(dòng)駕駛的適用條件,即Operational Design Domain (ODD),最高時(shí)速不超過(guò)65英里也就是大約100公里。可以適應(yīng)各種道路類(lèi)型包括市區(qū)道路、郊區(qū)道路、村鎮(zhèn)道路、高速公路、快速路,還有停車(chē)場(chǎng)或停車(chē)庫(kù),顯然,它可以做AVP全自動(dòng)泊車(chē)。
因?yàn)橛屑す饫走_(dá)可以24小時(shí)全天候運(yùn)作,不需要任何照明。天氣方面,下雨天也可以正常運(yùn)作,只要不是暴雨,激光雷達(dá)基本可以正常工作。Argo AI也明確指出什么條件下不行,比如離路Off-Road。氣候條件,大雪、雨夾雪、冰雹、凍雨、濃霧下不行。同時(shí)還有極端環(huán)境,比如地震、颶風(fēng)、滑坡泥石流等。
在2021年5月,Argo AI公布了自己最遠(yuǎn)有效距離可達(dá)400米的激光雷達(dá),很快就會(huì)用自行開(kāi)發(fā)的激光雷達(dá)取代Velodyne的128線激光雷達(dá)。
和豐田一樣,大眾和福特的自動(dòng)駕駛都是奔著自主量產(chǎn)方向的,不僅要低成本,還要自主掌控大部分系統(tǒng),掌握大部分供應(yīng)鏈,這也是Waymo(進(jìn)入Waymo微門(mén)戶(hù))潛在的危機(jī),恐怕難有整車(chē)廠與其真心合作。
編輯:jq
-
AI
+關(guān)注
關(guān)注
88文章
35164瀏覽量
279950 -
大眾
+關(guān)注
關(guān)注
1文章
801瀏覽量
34397 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4236瀏覽量
192873 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
789文章
14321瀏覽量
170652
原文標(biāo)題:大眾和福特的自動(dòng)駕駛系統(tǒng)分析
文章出處:【微信號(hào):zuosiqiche,微信公眾號(hào):佐思汽車(chē)研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
卡車(chē)、礦車(chē)的自動(dòng)駕駛和乘用車(chē)的自動(dòng)駕駛在技術(shù)要求上有何不同?

自動(dòng)駕駛安全基石:ODD
新能源車(chē)軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車(chē)領(lǐng)域# 京東# 自動(dòng)駕駛# 自動(dòng)駕駛出租車(chē)# 京東自動(dòng)駕駛快遞車(chē)
NVIDIA Halos自動(dòng)駕駛汽車(chē)安全系統(tǒng)發(fā)布
光庭信息自動(dòng)駕駛系統(tǒng)亮相CES 2025
AUTOSAR通信對(duì)自動(dòng)駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計(jì)
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

重塑線控底盤(pán)技術(shù):自動(dòng)駕駛的未來(lái)支柱
自動(dòng)駕駛汽車(chē)安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論