") 基于AT91SAM7S256單片機(jī)和TinyOS操作系統(tǒng)實(shí)現(xiàn)聲傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的設(shè)計(jì)
基于AT91SAM7S256單片機(jī)和TinyOS操作系統(tǒng)實(shí)現(xiàn)聲傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的設(shè)計(jì)
作者:陸忠實(shí),沈軍,羅護(hù),胡博
引言
隨著傳感器技術(shù)、嵌入式計(jì)算技術(shù)、無線網(wǎng)絡(luò)通信技術(shù)、分布式信息處理技術(shù)以及微機(jī)電技術(shù)的不斷發(fā)展,出現(xiàn)了一種新型的網(wǎng)絡(luò)技術(shù)無線傳感器網(wǎng)絡(luò)技術(shù)。無線傳感器網(wǎng)絡(luò)能夠通過集成在網(wǎng)絡(luò)節(jié)點(diǎn)上的各類微型傳感器協(xié)作地實(shí)時(shí)監(jiān)測(cè)、感知和采集各種環(huán)境或監(jiān)測(cè)對(duì)象的信息,通過嵌入式系統(tǒng)對(duì)信息進(jìn)行處理,并通過隨機(jī)自組織無線通信網(wǎng)絡(luò)以多跳中繼方式將信息傳送到終端用戶。本文主要介紹聲傳感器網(wǎng)絡(luò)節(jié)點(diǎn)硬件系統(tǒng)的設(shè)計(jì)。
1 聲傳感器網(wǎng)絡(luò)結(jié)構(gòu)
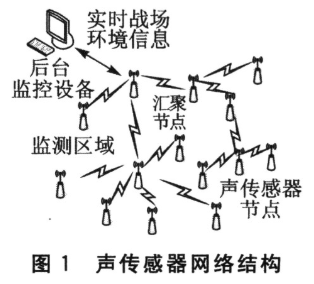
如圖1所示,聲傳感器網(wǎng)絡(luò)結(jié)構(gòu)通常包括聲傳感器節(jié)點(diǎn)、匯聚節(jié)點(diǎn)和后臺(tái)監(jiān)控設(shè)備等。
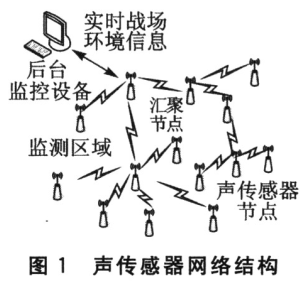
聲傳感器節(jié)點(diǎn)主要負(fù)責(zé)網(wǎng)絡(luò)的形成、數(shù)據(jù)的采集,并將數(shù)據(jù)通過多跳傳輸?shù)絽R聚節(jié)點(diǎn)。匯聚節(jié)點(diǎn)是無線傳感器網(wǎng)絡(luò)的中心節(jié)點(diǎn),負(fù)責(zé)網(wǎng)絡(luò)的發(fā)起、拓?fù)涞男纬膳c維護(hù)、網(wǎng)絡(luò)數(shù)據(jù)的匯集與處理,以及與后臺(tái)監(jiān)控設(shè)備的通信與信息交互。后臺(tái)監(jiān)控設(shè)備負(fù)責(zé)數(shù)據(jù)的處理、網(wǎng)絡(luò)拓?fù)涞目刂啤⒕W(wǎng)絡(luò)的監(jiān)護(hù)。為了感知監(jiān)測(cè)區(qū)域內(nèi)的聲音信息,可以通過人工布撒的方式把一定數(shù)量的聲傳感器節(jié)點(diǎn)部署在監(jiān)測(cè)區(qū)域內(nèi),聲傳感器節(jié)點(diǎn)之間或者聲傳感器節(jié)點(diǎn)與匯聚節(jié)點(diǎn)之間就能夠自動(dòng)形成一個(gè)自組織、多跳的網(wǎng)絡(luò)。聲傳感器節(jié)點(diǎn)周期性或者觸發(fā)式地采集聲音數(shù)據(jù)并與周圍的節(jié)點(diǎn)進(jìn)行數(shù)據(jù)交換,將數(shù)據(jù)及時(shí)地通過自適應(yīng)的路由,多跳中繼后傳輸給匯聚節(jié)點(diǎn);匯聚節(jié)點(diǎn)將匯集的數(shù)據(jù)通過北斗通信模塊轉(zhuǎn)發(fā)給后臺(tái)監(jiān)控設(shè)備,實(shí)現(xiàn)監(jiān)測(cè)區(qū)域內(nèi)聲音信息的上傳。
2 聲傳感器節(jié)點(diǎn)硬件系統(tǒng)
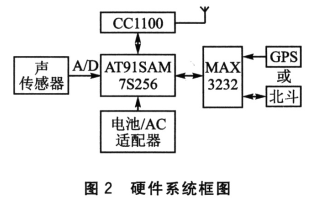
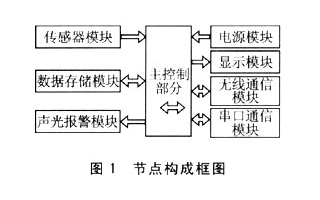
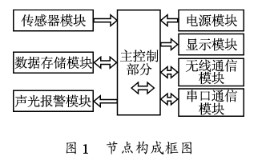
聲傳感器節(jié)點(diǎn)由主控芯片AT91SAM7S256單片機(jī)、射頻芯片CC1100、串口電壓轉(zhuǎn)換芯片MAX3232,以及電源、聲傳感器、GPS與北斗、各種控制器組成。其硬件系統(tǒng)框圖如圖2所示。系統(tǒng)以低功耗為設(shè)計(jì)目標(biāo),所以硬件設(shè)計(jì)上均采用了同類產(chǎn)品中功耗最低或者較低的產(chǎn)品,以保證系統(tǒng)長(zhǎng)時(shí)間的監(jiān)測(cè)工作。
聲傳感器節(jié)點(diǎn)硬件系統(tǒng)采用模塊化的設(shè)計(jì)思想進(jìn)行設(shè)計(jì),下面介紹具體模塊。
2.1 處理器模塊
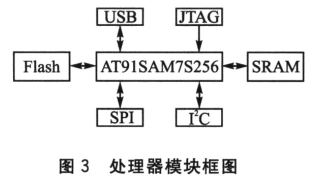
本設(shè)計(jì)采用以AT91SAM7S256為核心的處理器模塊。AT91SAM7S256是Atmel 公司32位ARM RISC處理器Ar91SAM7S系列中的一員。它片內(nèi)集成了256KB的Flash和64 KB的SRAM,充足的存儲(chǔ)空間可以保證數(shù)據(jù)采集和傳送協(xié)議的正常運(yùn)行,方便程序的設(shè)計(jì)與實(shí)現(xiàn);豐富的外設(shè)包括串口、SPI、I2C和USB等;工作溫度范圍為-40~+85℃;具有中斷喚醒功能,可以通過中斷使單片機(jī)從休眠模式轉(zhuǎn)為活動(dòng)模式。
因此,AT91SAM7S256完全能夠滿足無線傳感器網(wǎng)絡(luò)的設(shè)計(jì)要求。處理器模塊框圖如圖3所示。
2.2 無線射頻模塊
本設(shè)計(jì)中無線射頻模塊選用Chipcon公司生產(chǎn)的無線射頻芯片CC1100來實(shí)現(xiàn)。 CC1100是一款真正的低成本、低功耗、單片的UHF無線收發(fā)器;工作電壓為1.8~3.6 V;工作頻段靈活,可以設(shè)定在315/433/868/915 MHz的ISM和RSD頻段,其數(shù)據(jù)傳輸率最高可達(dá)500 kb/s;輸出功率多級(jí)可調(diào),可以選擇多種調(diào)試方式。此外,CC1100還具有許多其他功能:數(shù)據(jù)的自動(dòng)組包與拆包、獨(dú)立的發(fā)送/接收FIFO、空閑信道評(píng)估功能、自動(dòng)喚醒功能、RSSI功能、自動(dòng)的前向糾錯(cuò)(FEC)、交織以及白化功能。CC1100與AT91SAM7S256的通信是通過SPI總線來實(shí)現(xiàn)的。無線射頻模塊電路如圖4所示。
2.3 聲音采集模塊
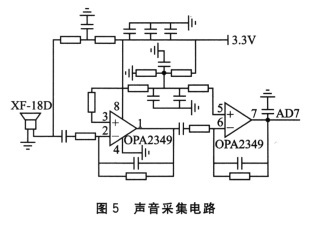
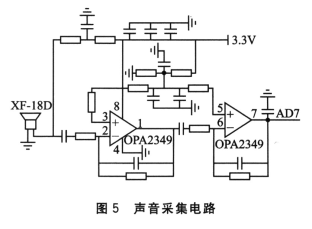
聲音測(cè)量通過駐極體XF-18D麥克風(fēng)陣列進(jìn)行測(cè)量。XF-18D麥克風(fēng)是電容式微麥克風(fēng),輸入信號(hào)為聲音信號(hào),輸出信號(hào)經(jīng)MAX4477構(gòu)成的前置放大電路后進(jìn)行電壓值A(chǔ)/D采樣。處理器的A/D采樣頻率可達(dá)20CkHz,可捕獲到較寬范圍的聲音信號(hào)。
本設(shè)計(jì)中放大元件采用Maxim公司生產(chǎn)的MAX4477放大器。它是一款高帶寬、低噪聲、低失真運(yùn)算的放大器,提供滿擺幅輸出,工作電壓可低至2.7 V。聲音采集電路如圖5所示。
2.4 GPS與北斗模塊
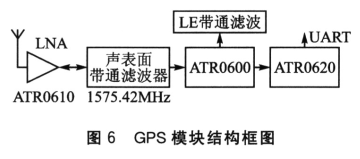
由于各個(gè)節(jié)點(diǎn)需要獲取自身的位置和精確的時(shí)間,因此每個(gè)節(jié)點(diǎn)需安裝GPS或者北斗模塊。可采用Atmel公司提供的GPS模塊,采用的是串行輸出,只要2 個(gè)串行信號(hào)線就可以完成較精確的差分衛(wèi)星定位。GPS模塊的支持電壓為2.7~3.3 V,功率小于100 mW/H。GPS模塊由變頻器模塊(ATR0600)、信號(hào)相關(guān)模塊(ATR0610)、微處理器模塊(ATR0620)組成。圖6為GPS模塊結(jié)構(gòu)框圖。
2.5 電源模塊
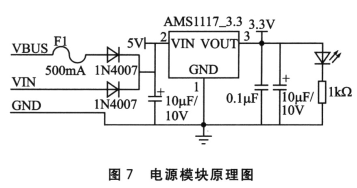
電源模塊的功能是提供節(jié)點(diǎn)工作所需的能量,本節(jié)點(diǎn)可通過4節(jié)干電池或 USB端口供電。由于4節(jié)干電池和USB端口提供的電壓都是大于處理器模塊、 CC1100和聲音采集模塊所需的3.3 V電源,所以必須將輸入電壓調(diào)整至節(jié)點(diǎn)所需的電壓。此電源模塊設(shè)計(jì)采用的是AMS1117_3.3電壓調(diào)節(jié)器,它的作用是把4節(jié)干電池和USB端口提供的 5 V電壓調(diào)節(jié)到所需的3.3 V。其電路設(shè)計(jì)如圖7所示。
3 實(shí)驗(yàn)結(jié)果
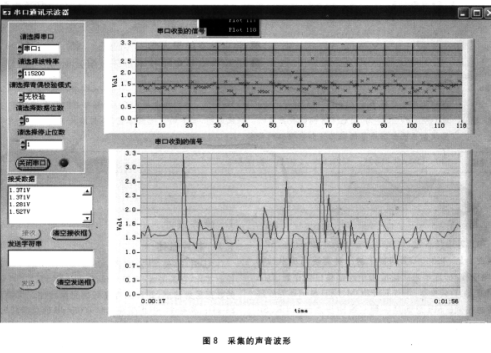
節(jié)點(diǎn)硬件系統(tǒng)上移植了TinyOS操作系統(tǒng),基于操作系統(tǒng)進(jìn)行各個(gè)模塊的消息驅(qū)動(dòng)程序開發(fā),最后進(jìn)行路由算法的移植。使用2個(gè)節(jié)點(diǎn)(1個(gè)終端節(jié)點(diǎn)和1個(gè)匯聚節(jié)點(diǎn))進(jìn)行組網(wǎng)實(shí)驗(yàn),測(cè)試節(jié)點(diǎn)對(duì)鼓掌聲音信號(hào)的靈敏度。采集的聲音波形如圖8所示。
結(jié)語
由于采用了模塊化的設(shè)計(jì)方法,本文設(shè)計(jì)的聲傳感器網(wǎng)絡(luò)節(jié)點(diǎn)硬件系統(tǒng)有助于擴(kuò)展不同類型的傳感器;此外,該系統(tǒng)還具有成本低、體積小、功耗低等特點(diǎn),非常適應(yīng)未來多樣化環(huán)境監(jiān)測(cè)任務(wù)的需要。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2562文章
52504瀏覽量
763279 -
嵌入式
+關(guān)注
關(guān)注
5136文章
19519瀏覽量
314533 -
無線網(wǎng)絡(luò)
+關(guān)注
關(guān)注
6文章
1462瀏覽量
66606
發(fā)布評(píng)論請(qǐng)先 登錄
基于TinyOS和nRF24E1無線通信模塊實(shí)現(xiàn)無線傳感器網(wǎng)絡(luò)的設(shè)計(jì)
AT91SAM7S256定時(shí)器使用程序
基于TinyOS操作系統(tǒng)的I/O控制
聲傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的硬件系統(tǒng)設(shè)計(jì)
基于TinyOS的嵌入式無線傳感器網(wǎng)絡(luò)設(shè)計(jì)
基于TinyOS操作系統(tǒng)實(shí)現(xiàn)無線傳感器節(jié)點(diǎn)Mica的設(shè)計(jì)
如何構(gòu)建基于TinyOS的無線傳感器網(wǎng)絡(luò)?
無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)操作系統(tǒng)—TinyOS綜述
無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的設(shè)計(jì)與實(shí)現(xiàn)

傳感器網(wǎng)絡(luò)操作系統(tǒng)平臺(tái)之nesC語言及TinyOS操作系統(tǒng)詳述

基于AT91SAM7S256單片機(jī)和CC1100射頻芯片實(shí)現(xiàn)無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)設(shè)計(jì)
采用TinyOS操作系統(tǒng)和單片機(jī)實(shí)現(xiàn)無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)的設(shè)計(jì)
基于nRF24E1的傳感器網(wǎng)絡(luò)系統(tǒng)構(gòu)建及TinyOS程序設(shè)計(jì)
TinyOS操作系統(tǒng)的工作原理、應(yīng)用技術(shù)及應(yīng)用分析

AT91SAM7S128解密成功,AT91系列單片機(jī)解密






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論