") 關于目標檢測系統(tǒng)的應用原理的分析與介紹
關于目標檢測系統(tǒng)的應用原理的分析與介紹
摘 要:為不斷完善和發(fā)展港口碼頭自動化水平,提高軌道式集裝箱起重機的作業(yè)效率,對目標檢測系統(tǒng)的應用原理進行分析介紹。目標檢測系統(tǒng)激光器通過對周圍環(huán)境進行掃描,采集數據點進行處理判斷,對目標物體生成對應坐標點反饋給控制器進行控制,協(xié)同完成自動作業(yè)任務。通過實際的系統(tǒng)應用,結合軟件監(jiān)控對作業(yè)時優(yōu)缺點進行分析,對故障分類并總結對應處理方法。關鍵詞:目標檢測系統(tǒng);自動化碼頭;激光器;故障處理;視覺處理中圖分類號:U691+.3 文獻標識碼:A 文章編號:1001-0785(2020)11-0069-06
0 引言
近年來,自動化集裝箱碼頭因其環(huán)保、高效、節(jié)能、穩(wěn)定、標準和經濟被越來越多的港口所接受,從新加坡、荷蘭、日本、美國、德國、英國、澳大利亞到上海、廈門以及青島[1],國內外大型港口逐步自動化智能化促進了全球港口集裝箱自動化的發(fā)展,使港口不再是傳統(tǒng)的地域上的綜合物流樞紐,更是一個動態(tài)化的拉動區(qū)域增長的支撐和引擎[2]。
目標檢測系統(tǒng)(Target Detection System, 簡稱TDS)利用3D 激光技術,配合轉動馬達,對目標物體進行精確掃描,達到目標定位和設備保護的目的。無人自動化碼頭興起以來,對軌道式集裝箱起重機(以下簡稱軌道吊)自動化技術研究越來越深入,為滿足堆場和無人集卡自動抓放箱要求,對自動化堆場的“眼睛”——自動目標檢測系統(tǒng)進行升級改進。其主要利用Sick 激光器的掃描功能,通過多個激光器協(xié)同配合,與軌道吊控制器相互配合,完成作業(yè)任務。其作業(yè)環(huán)境主要分為兩種,一種是在堆場中進行抓放箱任務,主要是通過在吊具高點對吊具兩側下方的堆場環(huán)境進行掃描,判斷出下方原有集裝箱位置,再通過與控制器交互進行命令交流,確保正常完成堆場任務。第二種是車道抓放箱任務,主要是在車道最上方對下方車輛進行激光掃描,當有車輛時,可通過掃描判斷是否為空車、集裝箱在車板的相對位置和車頭方向等,配合車輛引導系統(tǒng)對集卡進行精確引導定位,再進行收提箱操作。
自20 世紀70 年代以來,國內外對視覺識別和圖像檢測等問題進行不斷研究探索[3]Subramanian 聯(lián)合視覺系統(tǒng)和坐標測量機,將工件位置通過視覺系統(tǒng)測定發(fā)送給坐標測量器[4],實現(xiàn)了視覺識別的作業(yè)應用。Ballard 提出廣義霍爾變換的概念,通過目標檢測。對邊覺與工業(yè)融合,使理論與實踐相適應并用科技推動生產進步。
1 結構原理
1.1 3D 掃描機構
在軌道吊的小車架上安裝兩個轉動機構,分別是遠端轉動機構(司機室側)和近端轉動機構(非電氣房側)。
轉動機構和激光器一起安裝于小車平臺下方,其工作模式分為靜待掃描和動態(tài)掃描兩種。靜態(tài)掃描時當吊具在最高點,將要抓放箱時,對下部環(huán)境進行掃描,并將結果反饋給軌道吊控制器,判斷是否安全,同時對軌道吊進行位置調整,準備動作;動態(tài)掃描時,吊具下降到臨近著箱,激光器再對下方環(huán)境進行掃描,比對當前位置是否安全,是否已滿足著箱外部條件,當條件滿足時著箱,不滿足需配合吊具姿態(tài)調整模塊控制微動電機調整,再次掃描著箱。3D 轉動機構通過CAN 通信進行轉動馬達控制,通過以太網與工控機進行信息交互。通過CAN 光轉和以太網光轉進行光電信號轉換完成信息遠距離傳輸。整個系統(tǒng)由兩個3D 轉動機構組成,分為近端和遠端,分別安裝在大車中線并距離小車中線1500 mm 的位置上,便于對整個工作環(huán)境同時掃描。
1.2 軟件監(jiān)控
1)實時監(jiān)控
如圖2 所示,TDS 監(jiān)控與激光器相對應,分為近端監(jiān)控和遠端監(jiān)控,分別對兩個轉動機構發(fā)回的數據進行顯示處理,并配合圖像一起顯示在監(jiān)控畫面右上方。集裝箱定位只需確定兩個參考點,即邊長方向中心線上距離寬邊等距兩點,通過兩點的相對位置變化可明顯判斷集裝箱水平位置偏移情況。TDS 激光器采集的數據,通過處理擬合出兩條邊線,計算出規(guī)定距離的坐標點。在軟件監(jiān)控界面顯示的為每個激光器數據計算點LeftCtrl和RigehtCtrl,為集裝箱一側的兩點,經處理后可得到最終兩點反饋給控制器。集卡定位同樣只需兩點,邊長中線上距離車頭和車尾固定位置的兩點。車尾寬度邊線由集卡引導系統(tǒng)給出確切點,配合TDS 的擬合中線計算出坐標,由監(jiān)控軟件顯示。
當有故障發(fā)生時,由于控制器反饋的局限性,有些實時具體故障無法顯示,需要TDS 監(jiān)控界面顯示故障并記錄,且顯示在右下區(qū)域便于在維修時進行故障分析。在軌道吊接收到總控制器發(fā)出的命令后,通過PLC 控制大車小車到達指定貝位,此時TDS 開始作業(yè),所以在監(jiān)控界面最下方加入各運動機構的位置信息,便于判斷TDS 的工作狀態(tài)。由于以太網和CAN 雙通信,需要對通信網絡進行實時反饋,便于對故障點進行查找,在監(jiān)控軟件左側分別進行顯示。
為方便調試標定,在監(jiān)控軟件內加入模擬指令,通過控制器和工控機的信息交流計算,對不同的指令設置給出相應數據支持。
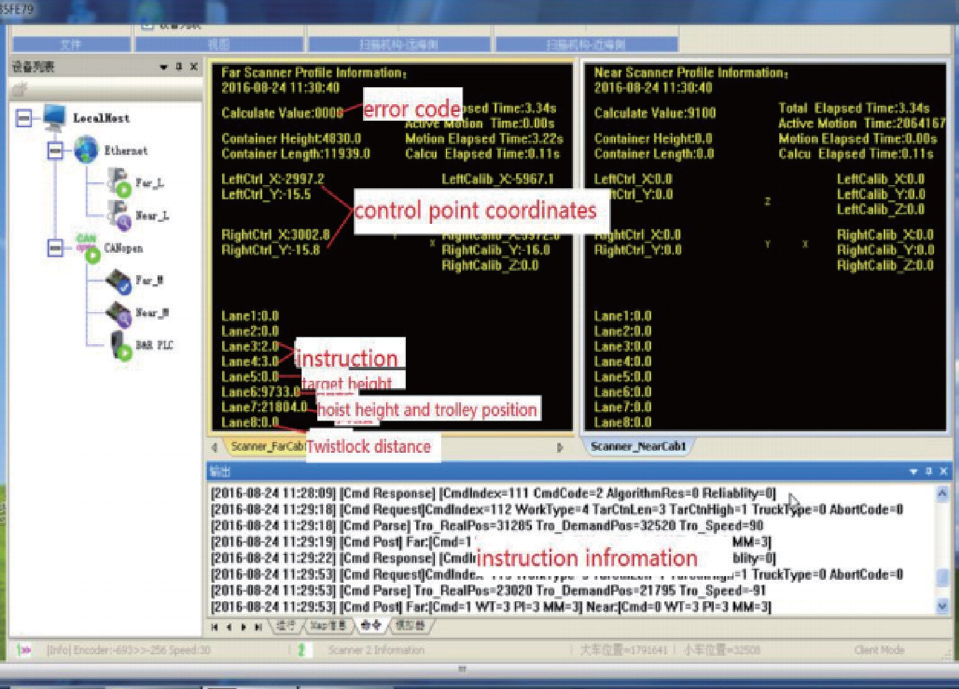
圖2 監(jiān)控軟件
2)激光器污染監(jiān)控
如圖3 所示,TDS 激光器安裝在小車上架的露天位置,當遇到粉塵、大霧、大雪等極端天氣時,會使其外殼吸附雜物變臟,影響激光器作業(yè)。此時需要對激光器的污染程度進行實時監(jiān)控,便于維保保證設備正常運行。
SOPAS ET 軟件是與TDS 激光器攝像頭相匹配的檢測軟件,既可對激光器污染程度進行顯示,還可對不同參數等進行配置。
通過軟件登錄許可,可對激光器參數進行修改,需要觀察污染程度時, 由Parameter的Contaminationmeasurement可觀察曲面激光器屏幕的5 °、35 °、70°、110°、145°和175°等不同方位的清晰度百分比,進而準確了解激光器污染狀態(tài)。
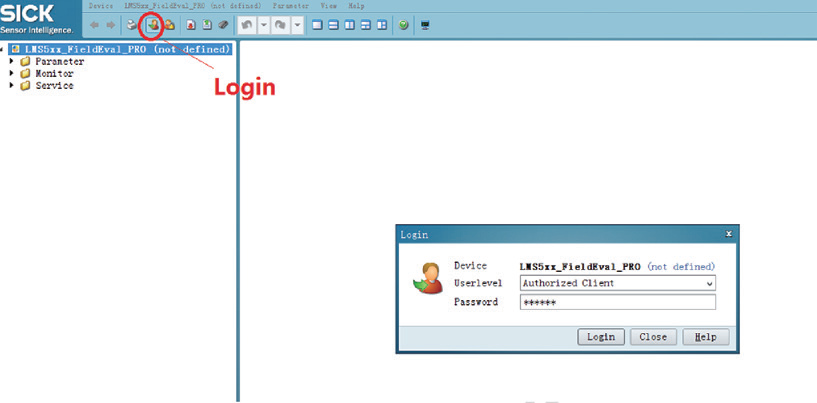
圖3 激光器監(jiān)控軟件
1.3 安裝標定
由于TDS 系統(tǒng)工作時需要較高的準確度,所以在標定時要保證標定環(huán)境的穩(wěn)定,嚴禁在大風大雨大霧的情況下標定。由于識別問題,標定時不可選用箱頂為深藍色或有水覆蓋的箱體,在TDS 系統(tǒng)標定前應確保各設備正常且地面平整。
1)TDS 轉動機構調平
將40 尺標準集裝箱放到地面貝位標志內,從工控機對TDS 基本參數數值按規(guī)定修改,打開TDS 監(jiān)控軟件,發(fā)送模擬抓箱指令,此時TDS 正常工作,并計算出遠近端抽象坐標點LeftCtrl 和RigehtCtrl(見圖4)。
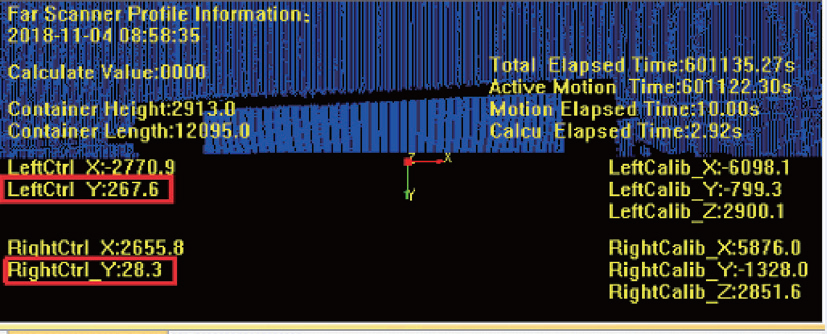
圖4 掃描畫面
對比兩坐標點數據,因一側坐標Y 值相差不大,當左右兩數值差大于25 mm 時,須對轉動機構進行機械調整,直到數值滿足條件為止。
2)馬達零位以及大車方向角度修正在轉動機構調整完成后,吊具上行至上停止點,對小車不動并記錄此時位置。發(fā)送模擬指令抓一層箱,記錄此時TDS 遠近端LeftCtrl 和RigehtCtrl 坐標點(見表1)。
此后與場橋司機配合手動放二、三和四層箱,不需要數據記錄。手動放第五層箱時,小車盡量與第一層箱作業(yè)時位置相近,完成后吊具上升至上停止位。通過TDS 監(jiān)控軟件發(fā)送第五層抓箱指令,并記錄小車位置和數據點同上。填入表格計算出馬達零點以及大車角度修正值,對原有參數進行修改完成調試。
3)設置馬達掃描范圍和數據采集抓箱、放箱和疊箱因工況不同對馬達掃描范圍要求不同,對應的掃描范圍需通過數據庫數據進行設置,分成3D 掃描范圍、小車掃描范圍和疊箱掃描范圍。遠近端位置和參數設置相匹配,在表格中修改后可正常運行。正常運行后對3D 掃描數據和小車移動數據進行采集記錄。
4)TDS 數據標定和高度匹配補償TDS 標定以標定程序為準,通過在標定程序輸入對應采集數據,并在多次重復自動生成后,對吊具姿態(tài)調整控制不再發(fā)生變化,證明標定完成。此時完成某一列標定,對于其他位置通過對吊具最低位置和最高位置姿態(tài)調整控制點,與實際偏差進行比較,自動生成不同列的標定數據。
當同一次抓箱時,TDS 計算高度H 與起升位置高度h 明顯存在偏差時,需對數據進行重新配置。當H 與h 的差值大于100 mm 時,將初始數據Highoffest 賦0 值,數據清零,再自動抓箱一次,打開軟件監(jiān)控界面記錄箱高container Height,找到起升實際位置Hoistland,通過兩者相減得到新Highoffest 值,再賦給初始參數。當重啟TDS 監(jiān)控軟件自動作業(yè)后H 與h 差值數據正常,調試完畢。
2 應用及故障分析
2.1 應用功能描述
1)安全保護
在堆場自動化作業(yè)過程中,因無人操控而使目標檢測尤為重要,安全位置的目標檢測可避免危險事故發(fā)生,保證生產安全。自動化設備的關鍵便是能自行判斷工況環(huán)境并加以處理,其中傳感器系統(tǒng)可完成系統(tǒng)中的信息采集和處理任務,能準確判斷外部環(huán)境進行作業(yè)。目標檢測技術的3D 轉動機構就是典型傳感器系統(tǒng),可輔助軌道吊自動化系統(tǒng)完成復雜工況的作業(yè)任務。TDS 的安全保護功能主要通過對集裝箱箱高和箱子類型尺寸檢測加以實現(xiàn)。在掃描完成后,將目標高度和集裝箱尺寸等信息發(fā)送給軌道吊控制器,根據控制策略可完成不同任務動作并進行風險規(guī)避。當目標位置高度接近策略要求高度時,會對起升機構進行限速處理,當目標箱尺寸發(fā)生變化時,可通知控制器更改吊具尺寸來完成相應作業(yè)任務。
對于特殊工況,當有人工需求需要手動抓放箱時,因個人習慣和人眼判斷等因素影響,很難將集裝箱貝位位置放置準確,此時將會出現(xiàn)歪箱或斜箱的現(xiàn)象。當轉為自動作業(yè)后,TDS 會對堆場再次進行掃描,并規(guī)劃出保護區(qū)域,當歪箱、斜箱不能正常作業(yè)或無法判斷是否有安全事故隱患時,將會切換遠程故障臺由人工進行詳細判斷,避免了盲目自動抓箱造成集裝箱相撞或其他安全事故的發(fā)生(見圖5)。
如圖6 所示,由于軌道吊等定位故障且未報警時,自動軌道吊正常作業(yè),但因定位問題或指令錯發(fā),造成在吊具運行過程中存在與其他列高層箱相撞的情況。此時TDS 會對周圍集裝箱進行掃描,在發(fā)現(xiàn)路徑方向有集裝箱不能正常作業(yè)時,同樣會切換遠程故障臺由人工解決,防止繼續(xù)作業(yè)造成安全事故。
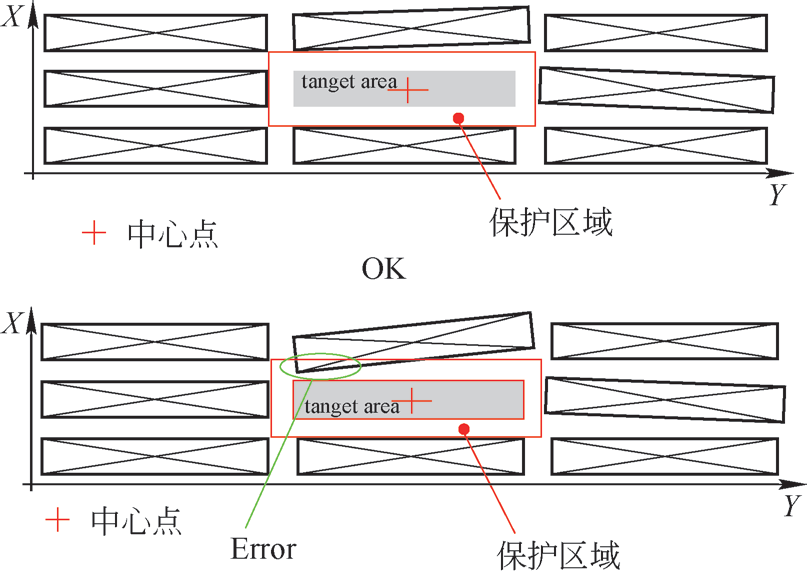
圖5 保護原理
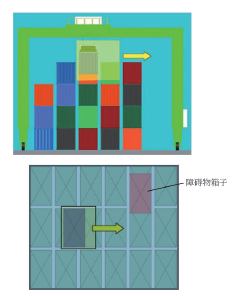
圖6 防撞原理
2)精確定位
如圖7 所示,TDS 系統(tǒng)有精確的定位功能,其通過轉動機構的配合,可較全面準確地對目標區(qū)域進行掃描,并對目標進行確認。主要檢測對象有集裝箱位置、集卡車位置和雙箱間隙等。當集裝箱因地面不平或人工作業(yè)等因素造成位置不規(guī)范時,可通過數據處理對目標位置進行重新定位。具體定位通過監(jiān)控軟件進行顯示,并由工控機進行數據處理與控制器交互。
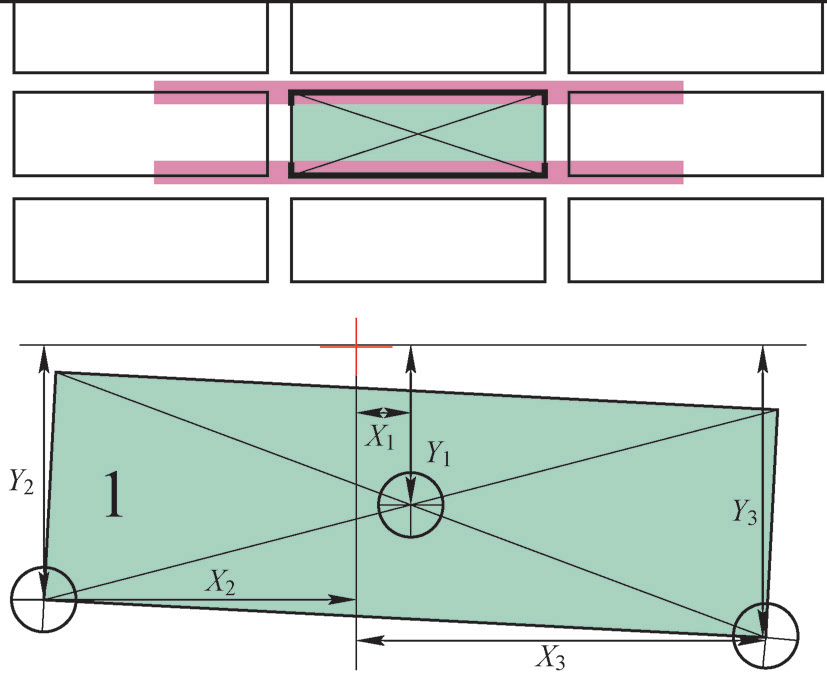
圖7 定位原理
2.2 故障分析處理
1)設備運行狀態(tài)
異常具體現(xiàn)象:TDS 工控機通信問題、激光器和馬達硬件故障。
影響程度:嚴重。
解決措施:聯(lián)系現(xiàn)場維修檢查線路問題或重啟TDS工控機,檢查激光器的硬件是否受損,馬達轉動是否靈敏,如有卡頓情況需更換。
2)算法限制
具體現(xiàn)象:當激光器污染較輕時,雖未達到污染報警程度,但對數據采集產生一定干擾,導致算法處理受限;當集裝箱為黑色或深藍色,受條件限制,掃描數據存在誤差。
影響程度:嚴重。
解決措施:檢查激光器污染情況,須擦拭時聯(lián)系現(xiàn)場擦拭。限制顏色偏深集裝箱進入堆場,當因太臟或外界環(huán)境因素導致算法錯誤時,人工抓箱。
3)等待超時
具體現(xiàn)象:TDS系統(tǒng)工控機與控制器指令通信故障,等待超時。
影響程度:一般。
解決措施:檢查TDS 系統(tǒng)監(jiān)控軟件,異常時導致與控制器指令交互問題,檢查工控機與控制器交互通道。
4)激光器攝像頭臟
具體現(xiàn)象:當大霧、大雨、大雪和大風等天氣時,激光器外罩極易附著空氣中漂浮顆粒,會導致激光器模糊不能作業(yè)。在使用一定周期后,激光器變臟需處理。
影響程度:嚴重。
解決措施:參照SOPAS 激光器監(jiān)控軟件對受污染情況分地址查看,當百分比小于80% 時,其對應角度需要擦拭。定期對TDS 激光器外殼進行有規(guī)律擦拭。
5)周圍有障礙物
具體現(xiàn)象:在堆場作業(yè)時,TDS 通過檢測發(fā)現(xiàn)周圍距離小于25 cm,在安全位置內。
影響程度:一般。
解決措施:臨時手動進行抓放。導致的原因可能是人工放箱或設備位置偏差,需對人工作業(yè)時進行嚴格要求,檢查小車位置是否準確,與大車起升位置是否匹配,如有問題需對準貝位重新標定。
6)指令不匹配
具體現(xiàn)象:20 尺、40 尺箱子與吊具對應不匹配。
抓放箱層高與實際不匹配。
影響程度:一般。
解決措施:存在吊具卡頓導致無法切換尺寸或箱子信息與指令任務信息不符。堆場地圖信息不匹配需重新更新地圖。
7)TDS 與控制器通信無心跳
具體現(xiàn)象:具體體現(xiàn)在監(jiān)控軟件中CAN 和以太網通訊故障。
影響程度:嚴重。
解決措施:需對光轉和Hub 進行檢查,對各通信端口接線進行插拔重連,重啟工控機。
3 總結
目標檢測系統(tǒng)涉及激光器的信息采集和處理,通過對目標信息判斷結合軌道吊完成作業(yè)任務。隨著智能化碼頭的發(fā)展,目標檢測技術在不斷發(fā)展成熟。3D 激光識別技術,通過對周圍物體的立體掃描進行環(huán)境識別,其優(yōu)點是可實現(xiàn)實時監(jiān)控,檢測距離精確,判斷位置準確,受工作環(huán)境影響小。對于目標物體以外的無關物體也可進行掃描,可能存在因周圍雜物影響而導致檢測不準情況發(fā)生。同時,由于對顏色的敏感性問題,對深色集裝箱信息采集困難。過于標準化的設定使其難以靈活處理復雜工況。這些都是此類目標檢測系統(tǒng)優(yōu)化的方向,通過不斷實踐和完善,目標檢測系統(tǒng)對工作環(huán)境適應能力會越來越強,使其在港口集裝箱作業(yè)中成為關鍵核心。
參考文獻
[1] 羅勛杰。 全自動化集裝箱碼頭關鍵裝備技術與發(fā)展[J]。港口裝卸,2019(1):1-5.
[2] 張炳漢。 建設第三代港口實現(xiàn)跳躍式發(fā)展[J]。 中國港口,2004(1):10-12.
[3] 匡家喜,柴佳祺。 基于圖像分析的自動化碼頭集裝箱邊緣檢測與定位問題研究[J]。 港口裝卸,2019(5):51-56.
[4] Subramanian R,Germain H,Drake S.Integrating a Vision System with a Coordinate Measuring Machine to Automate the Datum Alignment Process[C].Proc.Int.Des.Eng.Techn.Conf.Compu.Inf.Eng.Conf.Long Beach,CA,United states.American Society of Mechanical Engineers,2005:655-661.
[5] Ballard D H.Generalizing the hough transform to detectarbitrary shapes[J].Pattern Recognition,1981,13(2) :111-122.
編輯:lyn
-
控制器
+關注
關注
114文章
16969瀏覽量
182908 -
激光器
+關注
關注
17文章
2682瀏覽量
61913 -
目標檢測
+關注
關注
0文章
222瀏覽量
15899
原文標題:目標檢測系統(tǒng)在自動化碼頭中的應用
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
labview調用yolo目標檢測、分割、分類、obb
采用華為云 Flexus 云服務器 X 實例部署 YOLOv3 算法完成目標檢測

AI模型部署邊緣設備的奇妙之旅:目標檢測模型

在樹莓派上部署YOLOv5進行動物目標檢測的完整流程

電池的檢測標準是哪些?關于電池檢測標準全目錄!
圖像分割與目標檢測的區(qū)別是什么
目標檢測與圖像識別的區(qū)別在哪
目標檢測與識別技術有哪些
目標檢測與識別技術的關系是什么
目標檢測識別主要應用于哪些方面
慧視小目標識別算法 解決目標檢測中的老大難問題






 工商網監(jiān)
工商網監(jiān)
評論