") 基于單片機(jī)和虛擬現(xiàn)實(shí)技術(shù)實(shí)現(xiàn)全功能模擬雷達(dá)訓(xùn)練系統(tǒng)的設(shè)計(jì)
基于單片機(jī)和虛擬現(xiàn)實(shí)技術(shù)實(shí)現(xiàn)全功能模擬雷達(dá)訓(xùn)練系統(tǒng)的設(shè)計(jì)

航空兵在夜間或復(fù)雜氣象條件下實(shí)施轟炸或投布魚、水雷,在這種條件下,光學(xué)瞄準(zhǔn)具的使用有一定的局限性。而轟炸瞄準(zhǔn)雷達(dá)則可以彌補(bǔ)光學(xué)瞄準(zhǔn)具的這一局限性,它受氣象條件限制小,可以利用目標(biāo)反射的電磁波在遠(yuǎn)距離觀察、發(fā)現(xiàn)和識別目標(biāo),并對目標(biāo)實(shí)施轟炸或投射魚雷。在航行中,它可以提供必要的領(lǐng)航諸元,還可觀察山峰和雷雨云,防止飛機(jī)撞山和進(jìn)入雷雨區(qū)Ⅲ。由于轟炸瞄準(zhǔn)雷達(dá)的開關(guān)、旋鈕眾多,操作步驟復(fù)雜,因此在雷達(dá)教學(xué)和訓(xùn)練中需要較多的雷達(dá)操作實(shí)習(xí)。傳統(tǒng)的實(shí)習(xí)方法是在地面或空中操作實(shí)裝雷達(dá),其缺點(diǎn)是保障困難且會減少實(shí)裝雷達(dá)的使用壽命,另外在地面操作實(shí)裝雷達(dá)也探測不到大范圍的地物回波,無法培養(yǎng)飛行員發(fā)現(xiàn)、瞄準(zhǔn)目標(biāo)的能力。因此,研制一種能在地面進(jìn)行全功能模擬訓(xùn)練的轟炸瞄準(zhǔn)雷達(dá)訓(xùn)練系統(tǒng)是十分必要的。
1 主要功能
模擬訓(xùn)練系統(tǒng)主要完成以下功能:
(1)雷達(dá)操作程序的練習(xí),如通電前檢查程序,雷達(dá)開、關(guān)機(jī)程序,雷達(dá)信號檢查程序,雷達(dá)影像調(diào)整程序,對目標(biāo)的瞄準(zhǔn)程序等。
(2)模擬某一區(qū)域內(nèi)的地面和海面目標(biāo)雷達(dá)影像,用于搜索地面和水面目標(biāo)及瞄準(zhǔn)訓(xùn)練。
(3)利用雷達(dá)畫面確定飛機(jī)的領(lǐng)航要素,供領(lǐng)航員領(lǐng)航。如測量飛機(jī)地速、偏流、真高、地標(biāo)相對方位角、地標(biāo)斜距以及確定本機(jī)位置等。
(4)教控臺同步顯示各雷達(dá)模擬器的畫面及操作,以利于教員對學(xué)員的操作進(jìn)行*價(jià)。
(5)管理學(xué)員的雷達(dá)操作成績,如學(xué)員信息的錄入,學(xué)員成績的*定、檢索、打印等。
2 硬件設(shè)計(jì)
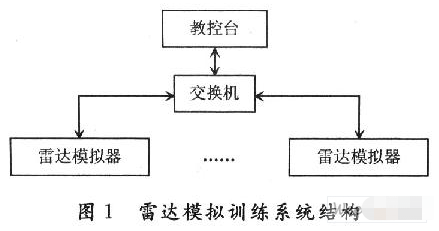
模擬系統(tǒng)由教控臺、多部雷達(dá)模擬器組成。教控臺和雷達(dá)模擬器之間由網(wǎng)絡(luò)連接通信,結(jié)構(gòu)如圖1所示。
2.1 教控臺
教控臺由控制臺和一臺計(jì)算機(jī)組成,用來導(dǎo)演戰(zhàn)場想定背景、模擬雷達(dá)載機(jī)的運(yùn)動、監(jiān)控學(xué)員對雷達(dá)的操作及對訓(xùn)練操作進(jìn)行*估。它通過網(wǎng)絡(luò)與雷達(dá)計(jì)算機(jī)進(jìn)行通信,向雷達(dá)計(jì)算機(jī)實(shí)時(shí)傳送戰(zhàn)場態(tài)勢和載機(jī)參數(shù),雷達(dá)計(jì)算機(jī)則向教控臺傳送雷達(dá)狀態(tài)和雷達(dá)顯示畫面。
2.2 雷達(dá)模擬器
為了保證模擬器操作界面的逼真性,雷達(dá)模擬器采用半實(shí)物仿真的方式。由于雷達(dá)顯示器是最主要的顯示操作設(shè)備,且該型雷達(dá)顯示器形狀不規(guī)則難以仿真制作,因此雷達(dá)顯示器采用實(shí)裝設(shè)備。其余控制設(shè)備本著外觀一致、控制關(guān)系一致、接口一致的原則進(jìn)行設(shè)計(jì)制作。由一臺工控計(jì)算機(jī)作為仿真主機(jī)完成雷達(dá)模型建立和信號處理仿真,采集各元器件的開關(guān)量和模擬量,仿照實(shí)裝的邏輯關(guān)系,產(chǎn)生各種控制信號,控制面板上的各種指示燈、指示表和雷達(dá)顯示器上的視頻信號的顯示。
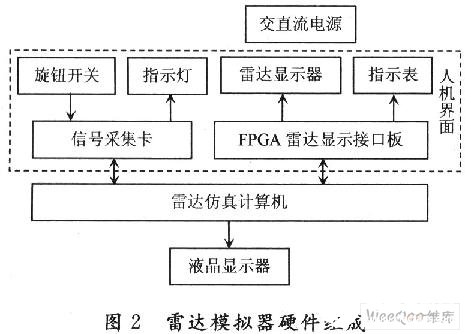
模擬器組成如圖2所示,雷達(dá)仿真計(jì)算機(jī)通過信號采集卡采集各元器件的開關(guān)量和模擬量,產(chǎn)生各種控制信號,控制面板上的各種指示燈;根據(jù)教控臺送來的戰(zhàn)場環(huán)境和載機(jī)參數(shù)完成雷達(dá)模型建立和信號處理仿真;模擬產(chǎn)生雷達(dá)回波和雷達(dá)的狀態(tài)并通過RS 232串口傳送至雷達(dá)顯示接口板。
雷達(dá)顯示接口板主要完成以下功能:
(1)根據(jù)雷達(dá)狀態(tài)產(chǎn)生重復(fù)頻率為l 250 Hz或535 Hz的各種波形驅(qū)動顯示器進(jìn)行掃描顯示,這些波形主要包括掃描鋸齒波、消隱方波、定時(shí)脈沖等。
(2)處理雷達(dá)仿真計(jì)算機(jī)送來的雷達(dá)回波,經(jīng)D/A轉(zhuǎn)換形成視頻信號后輸入到雷達(dá)顯示器。
(3)產(chǎn)生距離刻度脈沖、測距脈沖、主瞄脈沖、預(yù)瞄脈沖等送人雷達(dá)顯示器顯示成各類標(biāo)志。其中定時(shí)脈沖、掃描鋸齒波、消隱方波、各類脈沖和雷達(dá)回波這些信號要在時(shí)序上嚴(yán)格一致。
(4)根據(jù)雷達(dá)狀態(tài)驅(qū)動氣壓表、雷達(dá)信號檢查表、天線俯仰指示表指示相應(yīng)的位置。
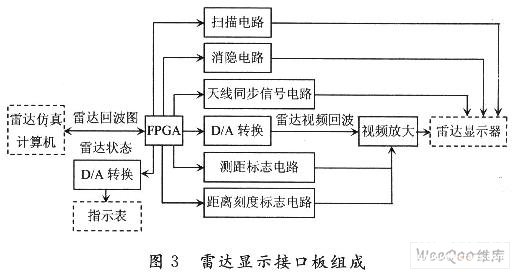
以FPGA為中心的雷達(dá)顯示接口板是系統(tǒng)設(shè)計(jì)的重點(diǎn)和難點(diǎn)之一,組成如圖3所示。雷達(dá)仿真主機(jī)與FPGA之間定時(shí)通信,將主機(jī)模擬的雷達(dá)狀態(tài)及地形目標(biāo)傳遞給FPGA。FPGA根據(jù)雷達(dá)狀態(tài)產(chǎn)生觸發(fā)脈沖到掃描電路產(chǎn)生鋸齒波,鋸齒波加入到雷達(dá)顯示器的偏轉(zhuǎn)線圈從而產(chǎn)生掃描線。FPGA根據(jù)雷達(dá)狀態(tài)控制天線同步信號電路產(chǎn)生不同速度的天線轉(zhuǎn)動信號,天線轉(zhuǎn)動信號加入到顯示器的天線同步接收器中驅(qū)動顯示器進(jìn)行圓周掃描或方型掃描。在觸發(fā)脈沖的觸發(fā)下,F(xiàn)P-GA把從雷達(dá)仿真主機(jī)接收到的當(dāng)前方位下的地物回波信號經(jīng)D/A轉(zhuǎn)換電路轉(zhuǎn)換成雷達(dá)視頻信號,再經(jīng)放大后加入到雷達(dá)顯示器的柵極,從而顯示出地面目標(biāo)回波圖像。FPGA還負(fù)責(zé)產(chǎn)生雷達(dá)顯示的其他信號,包括距離標(biāo)志、瞄準(zhǔn)標(biāo)志、噪聲、干擾等。此部分的設(shè)計(jì)要求實(shí)時(shí)性和同步性較高,雷達(dá)顯示接口板的運(yùn)行必須在時(shí)序上,特別是外部輸入/輸出工作時(shí)序上與真實(shí)雷達(dá)工作特性相一致,以實(shí)現(xiàn)與真實(shí)雷達(dá)顯示器的數(shù)據(jù)交換。
3 系統(tǒng)軟件設(shè)計(jì)
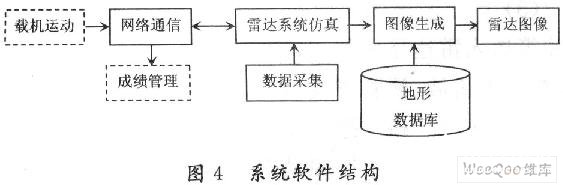
轟炸瞄準(zhǔn)雷達(dá)訓(xùn)練系統(tǒng)軟件運(yùn)行于Windows 2000操作平臺下,結(jié)構(gòu)如圖4所示。系統(tǒng)軟件通過對采集到的操作員的操作、載機(jī)的飛行參數(shù)和雷達(dá)系統(tǒng)狀態(tài)等信息進(jìn)行處理,利用虛擬現(xiàn)實(shí)技術(shù)實(shí)時(shí)地模擬生成逼真的雷達(dá)畫面。同時(shí)將雷達(dá)視頻回波由雷達(dá)顯示接口板傳送給真實(shí)雷達(dá)顯示器進(jìn)行顯示。
主要模塊的功能如下:
(1)數(shù)據(jù)采集模塊:主要用來采集雷達(dá)各個開關(guān)、旋鈕的狀態(tài)。
(2)通信模塊:負(fù)責(zé)教控臺與雷達(dá)模擬器、雷達(dá)模擬器與FPGA間交換數(shù)據(jù)。
(3)載機(jī)運(yùn)動仿真模塊:模擬生成載機(jī)運(yùn)動的航跡。根據(jù)飛行器質(zhì)心運(yùn)動模型模擬生成載機(jī)的飛行航線,根據(jù)飛行器的姿態(tài)角變化模型模擬生成載機(jī)的姿態(tài)。
(4)雷達(dá)系統(tǒng)仿真模塊:用計(jì)算機(jī)建模仿真雷達(dá)的功能狀態(tài)。
(5)地形數(shù)據(jù)庫模塊:利用MultiGen Creat建模工具建立地物場景的三維模型,如河流、山脈、樹林、城鎮(zhèn)、鐵路等,之后用MultiGen的TMM工具為三維模型加表面反射和紋理,最終生成地形紋理配置文件,在地形紋理配置文件中包括了所指定的地形紋理區(qū)域的大小和散射截面積。
(6)雷達(dá)圖像生成模塊:根據(jù)地形數(shù)據(jù)庫的地景數(shù)據(jù),利用Vega軟件的RadarWorks模塊生成雷達(dá)地物回波圖像。Vega的Radarworks模塊根據(jù)材質(zhì)數(shù)據(jù)庫、地形紋理配置文件及雷達(dá)系統(tǒng)參數(shù)、載機(jī)狀態(tài)信息等實(shí)時(shí)的判斷各個單元的有效反射面積并計(jì)算雷達(dá)反射強(qiáng)度,從而提供了基于真實(shí)地形的機(jī)載雷達(dá)的逼真的仿真圖像。
(7)成績管理模塊:*估、管理學(xué)員模擬訓(xùn)練成績。以上模塊中,載機(jī)運(yùn)動仿真模塊和成績管理模塊由教控臺計(jì)算機(jī)運(yùn)行,教控臺計(jì)算機(jī)和雷達(dá)仿真計(jì)算機(jī)都安裝有網(wǎng)絡(luò)通信模塊,其余模塊由雷達(dá)仿真計(jì)算機(jī)運(yùn)行。
系統(tǒng)軟件工作流程如下:載機(jī)運(yùn)動仿真模塊根據(jù)仿真模型和教員的指令生成載機(jī)飛行航線,模擬載機(jī)按設(shè)定的航線和高度進(jìn)行飛行,實(shí)時(shí)地將載機(jī)運(yùn)動參數(shù)通過網(wǎng)絡(luò)傳送給雷達(dá)仿真模塊。同時(shí)傳送給雷達(dá)仿真模塊的數(shù)據(jù)還有由數(shù)據(jù)采集模塊采集到的雷達(dá)開關(guān)、旋鈕狀態(tài)。雷達(dá)仿真模塊根據(jù)雷達(dá)當(dāng)前的開關(guān)、旋鈕位置確定雷達(dá)的工作狀態(tài),如距離量程、掃描方式等。雷達(dá)仿真模塊根據(jù)掃描方式確定天線轉(zhuǎn)速,根據(jù)載機(jī)位置、飛行高度和雷達(dá)天線俯仰角度等參數(shù)計(jì)算雷達(dá)的波束擦地角,進(jìn)而確定當(dāng)前雷達(dá)的距離探測范圍。雷達(dá)仿真模塊將計(jì)算到的波束寬度、方位掃描范圍、天線俯仰角、距離分辨率、掃描線掃描的增量、掃描速度和載機(jī)飛行參數(shù)傳遞給圖像生成模塊。圖像生成模塊利用Vega的Ra-darWorks模塊,通過設(shè)置以上雷達(dá)參數(shù)并根據(jù)載機(jī)的當(dāng)前位置調(diào)用地形數(shù)據(jù)庫中的數(shù)據(jù),生成仿真的雷達(dá)圖像。最后由通信模塊將雷達(dá)視頻回波經(jīng)雷達(dá)顯示接口板傳送給雷達(dá)顯示器顯示。
4 結(jié) 語
設(shè)計(jì)的訓(xùn)練系統(tǒng)采用半實(shí)物仿真,單片機(jī)控制、虛擬現(xiàn)實(shí)技術(shù)模擬轟炸瞄準(zhǔn)雷達(dá)。半實(shí)物仿真由于采用真實(shí)雷達(dá)顯示器和與實(shí)裝雷達(dá)一致的操作面板,因此模擬效果比虛擬仿真更真實(shí),尤其適合針對飛行人員的操作訓(xùn)練。通過虛擬現(xiàn)實(shí)技術(shù)可逼真地模擬飛行中的雷達(dá)回波圖像,使得雷達(dá)畫面更加真實(shí)。系統(tǒng)在檢測練習(xí)者的各種操作時(shí),能將雷達(dá)畫面顯示在教控臺顯示器上,可實(shí)時(shí)、全程監(jiān)控訓(xùn)練過程,便于整體教學(xué)。
責(zé)任編輯:gt
-
單片機(jī)
+關(guān)注
關(guān)注
6067文章
44991瀏覽量
650436 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3119瀏覽量
120096 -
模擬器
+關(guān)注
關(guān)注
2文章
894瀏覽量
44401
發(fā)布評論請先 登錄
虛擬現(xiàn)實(shí)在民航訓(xùn)練領(lǐng)域中的應(yīng)用與定位
虛擬現(xiàn)實(shí)產(chǎn)品大全200907
虛擬現(xiàn)實(shí)產(chǎn)品大全201001期
虛擬現(xiàn)實(shí)
基于FPGA的虛擬現(xiàn)實(shí)定位系統(tǒng)
老子云如何擺脫虛擬現(xiàn)實(shí)帶來的“虛擬”感?
基于MEMS傳感器的虛擬現(xiàn)實(shí)參觀系統(tǒng)
虛擬現(xiàn)實(shí)技術(shù)在工程裝備教學(xué)訓(xùn)練中的應(yīng)用
虛擬現(xiàn)實(shí)技術(shù)在工程裝備教學(xué)訓(xùn)練中的應(yīng)用
虛擬現(xiàn)實(shí)技術(shù),虛擬現(xiàn)實(shí)技術(shù)是什么意思
什么是虛擬現(xiàn)實(shí)技術(shù),虛擬現(xiàn)實(shí)技術(shù)的組成
淺析虛擬現(xiàn)實(shí)技術(shù)
基于虛擬現(xiàn)實(shí)技術(shù)的運(yùn)動系統(tǒng)設(shè)計(jì)
基于虛擬現(xiàn)實(shí)技術(shù)的多功能跑步機(jī)系統(tǒng)設(shè)計(jì)和相關(guān)研究技術(shù)的介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論