") 科普:先進(jìn)合成孔徑雷達(dá)的工作原理及系統(tǒng)組成
科普:先進(jìn)合成孔徑雷達(dá)的工作原理及系統(tǒng)組成
繼高度成功的ERS-1/2 SAR之后,歐洲航天局發(fā)射了攜帶先進(jìn)的合成孔徑雷達(dá)(ASAR)的遙感衛(wèi)星。ASAR是一種全天候全天時(shí)高分辨率的雷達(dá)成像系統(tǒng)。與ERS SAR相比,它具有擴(kuò)展的觀測能力,三種新的工作模式和改進(jìn)的性能。
測量原理
雷達(dá)天線波束照射面向衛(wèi)星的地面。由于衛(wèi)星的運(yùn)動(dòng),目標(biāo)單元被波束照亮一段時(shí)間,稱為“積分時(shí)間”。回波地面處理時(shí),積分時(shí)間內(nèi)接受的復(fù)雜回波信號(hào)會(huì)相干積累。這種處理過程等效于一個(gè)長天線(稱為“合成孔徑”)照射目標(biāo)。合成的孔徑大小等于衛(wèi)星在積分時(shí)間內(nèi)移動(dòng)的距離。
使用SAR原理可獲得的沿軌道分辨率(相當(dāng)于地面處理中的方位)是物理天線長度的一半。可以在圖像分辨率與其他圖像質(zhì)量參數(shù)(如輻射分辨率)之間權(quán)衡。
垂直于軌道方向的分辨率或距離分辨率是發(fā)射雷達(dá)帶寬的函數(shù)。
考慮到儀器的峰值功率限制,利用了脈沖壓縮技術(shù)來提高其性能。端到端系統(tǒng)相參工作的事實(shí)意味著,在整個(gè)儀器和信號(hào)處理鏈中,復(fù)雜的傳輸和接收信號(hào)之間的振幅和相位關(guān)系都保持不變。
工作模式
ASAR設(shè)備的設(shè)計(jì)提供了很強(qiáng)的任務(wù)靈活性。地面控制站可以在五種工作模式中任選其一:
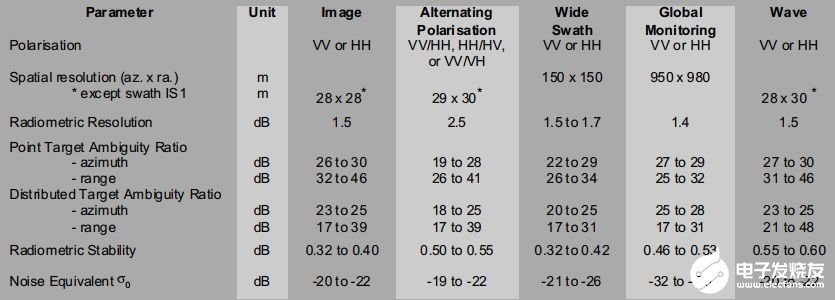
--圖像模式。生成空間高分辨率圖像(圖像精度30米)。這種模式下,雷達(dá)可以從入射角范圍在15°到45°之間的七個(gè)可選成像條帶中選擇一個(gè)條帶進(jìn)行成像。
--波模式。產(chǎn)生5KM*5Km區(qū)塊的圖像,沿衛(wèi)星運(yùn)行軌道方向間隔100公里。圖像區(qū)塊的位置可以從七個(gè)條帶中的任意兩個(gè)交替顯示。
--寬條帶和全球監(jiān)視模式。基于掃描SAR技術(shù),使用五個(gè)條帶,產(chǎn)生寬的條帶,子條帶和寬條帶的空間分辨率分別為150m和1000m。
這四種模式可以在兩個(gè)極化中的一個(gè)(HH或VV)。
--可選極化模式。在“HH和VV”、“HH和HV”或“VV和VH”中選擇,來自相同區(qū)域的兩個(gè)同時(shí)圖像,從而獲得與圖像模式相同的成像幾何形狀和類似的高空間分辨率。
ASAR系統(tǒng)組成
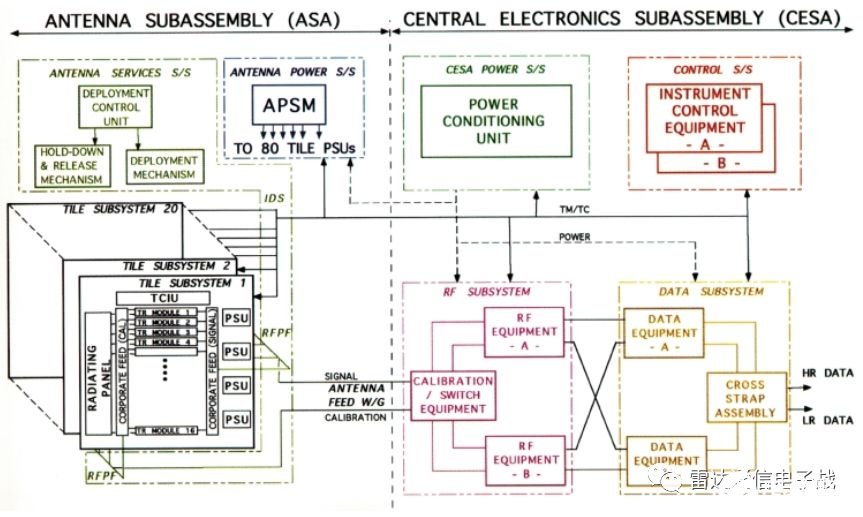
ASAR系統(tǒng)包含兩個(gè)主要部分:中央電子組件和天線電子組件。
有源天線由20個(gè)模組組成,每個(gè)模組包含16個(gè)子陣列,每個(gè)模塊包含一個(gè)收發(fā)模塊。系統(tǒng)由控制子系統(tǒng)驅(qū)動(dòng),控制子系統(tǒng)向空間飛行器提供命令和控制接口,管理任務(wù)參數(shù)的分發(fā)(如發(fā)射脈沖參數(shù)和天線波束設(shè)置),以及空中系統(tǒng)運(yùn)行的時(shí)序。
發(fā)射脈沖的參數(shù)由數(shù)據(jù)子系統(tǒng)(DSS)設(shè)置,是一個(gè)正斜率線性調(diào)頻脈沖,中心頻率是中頻載波的頻率(124MHz)。在射頻子系統(tǒng),脈沖經(jīng)過上變頻到射頻頻率(5.331GHz)并進(jìn)行放大。
信號(hào)通過波導(dǎo)功分網(wǎng)絡(luò)傳輸?shù)教炀€模組子系統(tǒng),隨后,在模組中,通過微帶傳輸?shù)矫總€(gè)T/R組件。T/R組件根據(jù)控制子系統(tǒng)發(fā)送來并存儲(chǔ)在模組控制接口單元中的波束位置參數(shù)配置發(fā)射波的相位和增益。
在接收部分,射頻回波信號(hào)沿與發(fā)射信號(hào)倒置的路徑下變頻到數(shù)據(jù)子系統(tǒng),在這部分,產(chǎn)生原始的科學(xué)數(shù)據(jù)并發(fā)送到空間平臺(tái)接口。
中央電子組件控制發(fā)射線性調(diào)頻信號(hào),將回波信號(hào)轉(zhuǎn)換成測量數(shù)據(jù),并且控制和監(jiān)視整個(gè)設(shè)備。ERS-1和ERS-2使用聲表面波器件產(chǎn)生模擬的線性調(diào)頻信號(hào),使用星載數(shù)據(jù)范圍壓縮,而ASAR使用數(shù)字技術(shù)實(shí)現(xiàn)星載線性調(diào)頻信號(hào)的產(chǎn)生和數(shù)據(jù)壓縮并緩存,輔以地面數(shù)據(jù)壓縮。
使用數(shù)字技術(shù)產(chǎn)生線性調(diào)頻信號(hào)的主要優(yōu)勢在于這種設(shè)計(jì)的功能靈活性更好,這種體制產(chǎn)生線性調(diào)頻的脈沖駐留時(shí)間和帶寬都是可調(diào)的,從而根據(jù)不同的需求更有效地調(diào)節(jié)信號(hào)參數(shù),實(shí)現(xiàn)更多的任務(wù)模式和條帶樣式。
在接收時(shí),回波信號(hào)首先經(jīng)過濾波和下變頻,而后經(jīng)過解調(diào)形成I&Q分量。這兩路信號(hào)隨后數(shù)字化采樣為8位的數(shù)字信號(hào)。如果需要可以進(jìn)行數(shù)據(jù)抽取,以壓縮數(shù)據(jù)量,如在全球監(jiān)視模式發(fā)射帶寬比較窄的時(shí)候。數(shù)據(jù)經(jīng)過抽取后,使用彈性自適應(yīng)數(shù)字化轉(zhuǎn)換器對(duì)回波信號(hào)進(jìn)行處理。
FBAQ算法允許在有限的數(shù)據(jù)傳輸速率下傳輸圖像而不會(huì)降低圖像質(zhì)量。這是通過使用優(yōu)化的雷達(dá)信號(hào)統(tǒng)計(jì)壓縮算法來實(shí)現(xiàn)的。已經(jīng)開發(fā)出來的FBAQ ASIC有三種操作方式:根據(jù)FBAQ算法(8至4位、3位或2位)壓縮、根據(jù)旁路或噪聲(固定指數(shù))壓縮,這取決于要處理的數(shù)據(jù)類型。
為了優(yōu)化原始數(shù)據(jù)傳輸,數(shù)據(jù)設(shè)備也包含存儲(chǔ)器,進(jìn)行回波數(shù)據(jù)傳輸前的暫存。
ASAR的有源天線是一個(gè)1.3m*10m的相位陣列。天線包含五個(gè)1.3*2m的面板,在設(shè)備隨衛(wèi)星發(fā)射的時(shí)候可以折疊起來。每個(gè)面板由四個(gè)0.65*1m的模組組合而成。天線子模塊可以分成三個(gè)子系統(tǒng):天線伺服子系統(tǒng),模組子系統(tǒng)和天線開關(guān)電源和監(jiān)控子系統(tǒng)。
天線是基于機(jī)械架構(gòu)的,包含五個(gè)堅(jiān)硬的碳纖維增強(qiáng)塑料框架和兩個(gè)碳纖維加強(qiáng)波導(dǎo)制成的射頻功分網(wǎng)絡(luò)為五個(gè)面板并行饋電。在發(fā)射時(shí),這五個(gè)面板折疊在中間那個(gè)固定的面板上面,由八個(gè)收放機(jī)械結(jié)構(gòu)固定住。
衛(wèi)星被釋放之后,天線面板通過步進(jìn)電機(jī)依次展開,并使用八個(gè)鎖定銷實(shí)現(xiàn)天線±4mm的平整精度。20個(gè)模組的任何一個(gè)都是完全獨(dú)立運(yùn)行的子系統(tǒng),包含四個(gè)供電單元,一個(gè)模組控制接口單元,兩個(gè)微帶射頻公分以及16個(gè)子陣,每個(gè)子陣有24個(gè)微帶雙極化的低損耗無色散輻射單元。
每個(gè)子陣連接有1個(gè)T/R組件,兩種極化信號(hào)獨(dú)立鏈接。16個(gè)子陣安裝到一起,通過熱和機(jī)械解耦,發(fā)射面板具有結(jié)構(gòu)和熱一致性。模組控制接口單元提供模組的控制功能。它實(shí)現(xiàn)T/R組件的本地控制,發(fā)送數(shù)據(jù)并實(shí)現(xiàn)與控制子系統(tǒng)的接口功能。
這320個(gè)T/R組件的每一個(gè)都包含兩路發(fā)射鏈路和一個(gè)共同的接收鏈路。為了實(shí)現(xiàn)校準(zhǔn),在模塊到天線之間安裝有一個(gè)耦合器。對(duì)于有源天線來說,T/R模塊的相位和幅度特性是溫度的函數(shù)。為了處理這個(gè)問題,設(shè)備中存儲(chǔ)了補(bǔ)償溫度漂移的數(shù)據(jù),T/R模塊的溫度被實(shí)時(shí)監(jiān)控,模組控制接口單元根據(jù)溫度進(jìn)行相位和幅度校準(zhǔn),這為天線提供了較高的穩(wěn)定性。
ASAR性能
合成孔徑雷達(dá)的固有原理決定了ASAR設(shè)備的性能無法直接測試。替代方法是從儀器測試的各個(gè)階段測量設(shè)備的底層參數(shù)。
以ASAR為例,由于其有許多工作模式并且需要測量多種參數(shù),所以,完成整個(gè)設(shè)備性能的驗(yàn)證需要大量的測試。在測試中還可以調(diào)整設(shè)備的工作參數(shù),以便在所有工作模式下都能獲得最佳的整體性能。
ASAR儀器的壽命預(yù)測結(jié)果如表所示。這些數(shù)字是在假設(shè)最壞情況的情況下得出的,并證明Envisat ASAR的使命目標(biāo)確實(shí)可以實(shí)現(xiàn)。
ESA開發(fā)了能夠近似實(shí)時(shí)處理和離線處理ASAR任何工作模式下傳回的數(shù)據(jù)的ASAR一體化處理器。這個(gè)處理器將被安裝在ESA的載荷數(shù)據(jù)處理站,歐洲環(huán)境衛(wèi)星處理和存檔中心(PACs),以及各個(gè)國家提供ESA ASAR服務(wù)的工作站。
使用一體化處理器將確保用戶獲得的產(chǎn)品的一致性(具有相同的格式和處理算法),并將簡化產(chǎn)品驗(yàn)證和未來產(chǎn)品升級(jí)的周期。
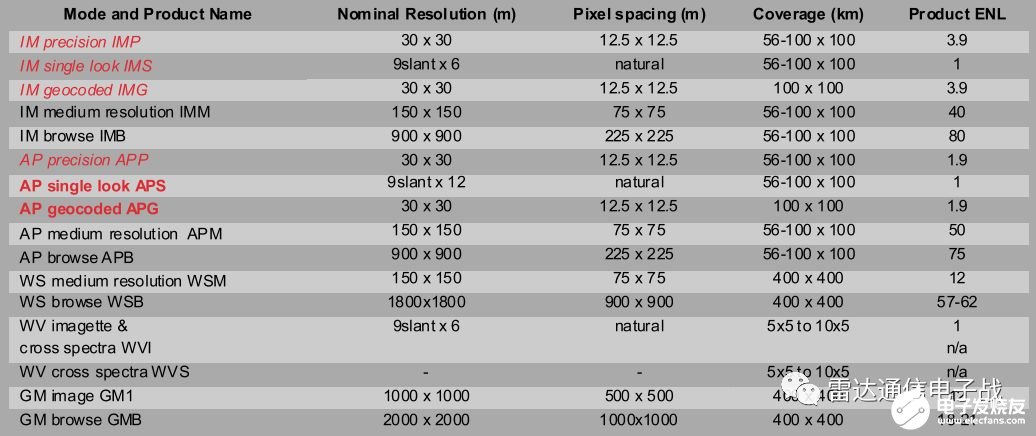
ASAR一體化處理器的關(guān)鍵新特性之一是能夠生成中等分辨率(150米)和低分辨率(1公里)的連續(xù)條帶圖像。處理后的條帶圖像相當(dāng)于十分鐘的成像模式,交叉極化模式和寬條帶模式,或者全球監(jiān)測模式中一個(gè)完整的軌道的圖像的數(shù)據(jù)量。用戶可以選擇處理后的條帶的任何一部分進(jìn)行查看。
處理器會(huì)計(jì)算校準(zhǔn)脈沖測量系統(tǒng)發(fā)射的脈沖、地面站測量的每行天線的方向圖以及外部特征數(shù)據(jù)的副本。通過對(duì)數(shù)據(jù)副本的處理跟蹤傳輸和接收鏈中的參數(shù)變化,用于確定距離壓縮處理的距離參考函數(shù)。
一體化數(shù)據(jù)處理器包括一個(gè)多普勒質(zhì)心估計(jì)器,對(duì)于ERS的圖像模式和波模式具有50hz的精度,對(duì)于ScanSAR模式具有25hz的精度,以限制方位角的測量誤差。
ASAR的一體化數(shù)據(jù)處理器可以確保對(duì)所有接收到的高速率數(shù)據(jù)系統(tǒng)地近乎實(shí)時(shí)處理,以生成中分辨率和瀏覽圖像。波模式或全球監(jiān)測模式下的數(shù)據(jù)也將以近乎實(shí)時(shí)的方式系統(tǒng)地處理。
此外,ASAR一體化數(shù)據(jù)處理器將根據(jù)用戶請(qǐng)求,允許高分辨率產(chǎn)品在接近實(shí)時(shí)或離線狀態(tài)下,對(duì)圖像模式或交叉極化模式(精確圖像、單一外觀復(fù)雜或橢球形地理編碼圖像)進(jìn)行處理。附圖顯示了精確圖像和中等分辨率圖像的示例。
ASAR的任務(wù)模式可以分成兩類:
--低數(shù)據(jù)率模式(全球監(jiān)測和波模式)可以在整個(gè)軌道周期中持續(xù)運(yùn)行。
--高數(shù)據(jù)率模式(成像,可選極化和寬條帶模式)每個(gè)軌道周期運(yùn)行30min。
總結(jié)
先進(jìn)合成孔徑雷達(dá)(ASAR)具有很強(qiáng)的靈活性,具有五種工作模式,能夠工作在水平和和垂直極化狀態(tài),俯仰角覆蓋范圍廣,可以通過對(duì)320個(gè)收發(fā)模塊的幅度相位進(jìn)行控制實(shí)現(xiàn)天線波束的銳化。為了達(dá)到指標(biāo)要求和使用的靈活性,許多新技術(shù)、過程和組件需要進(jìn)行控制。
所有獲取的數(shù)據(jù)都將以近似實(shí)時(shí)或者離線的方式由歐洲航天局的地面站的一體化數(shù)據(jù)處理器進(jìn)行處理。使用一體化數(shù)據(jù)處理器保證了數(shù)據(jù)處理的一致性。ASAR系統(tǒng)的大量產(chǎn)品需要?dú)W洲航天局監(jiān)制來保證用戶的使用。
責(zé)任編輯:haq
-
衛(wèi)星
+關(guān)注
關(guān)注
18文章
1753瀏覽量
68113 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3074瀏覽量
119364
發(fā)布評(píng)論請(qǐng)先 登錄
激光雷達(dá)(LiDAR)技術(shù)方案與工作原理全解析

纜道雷達(dá)波測流設(shè)備的工作原理
處理合成孔徑雷達(dá)圖像的極坐標(biāo)算法基礎(chǔ)
科普CMOS傳感器的工作原理及特點(diǎn)
原理圖下載 高性價(jià)比無人機(jī)載合成孔徑雷達(dá)系統(tǒng)
無人機(jī)載合成孔徑雷達(dá)系統(tǒng)研制手記(二):電子設(shè)計(jì)及天線

無人機(jī)載合成孔徑雷達(dá)系統(tǒng)研制手記(一):設(shè)計(jì)原理

敏捷合成器的技術(shù)原理和應(yīng)用場景
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
雷達(dá)探測器的工作原理 雷達(dá)探測器與激光探測器區(qū)別
一些著名的微型SAR






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論