") 永磁同步電機控制系列的數(shù)學模型(4)simulink仿真搭建案例
永磁同步電機控制系列的數(shù)學模型(4)simulink仿真搭建案例
1 電機模型的選擇及參數(shù)設(shè)置
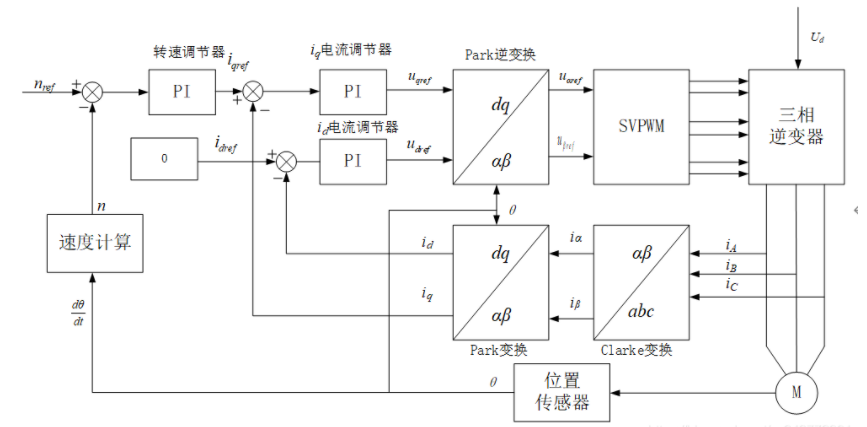
電機總體控制框圖如下,我們按照這個框圖來一步一步的搭建。
1.1 型號設(shè)置
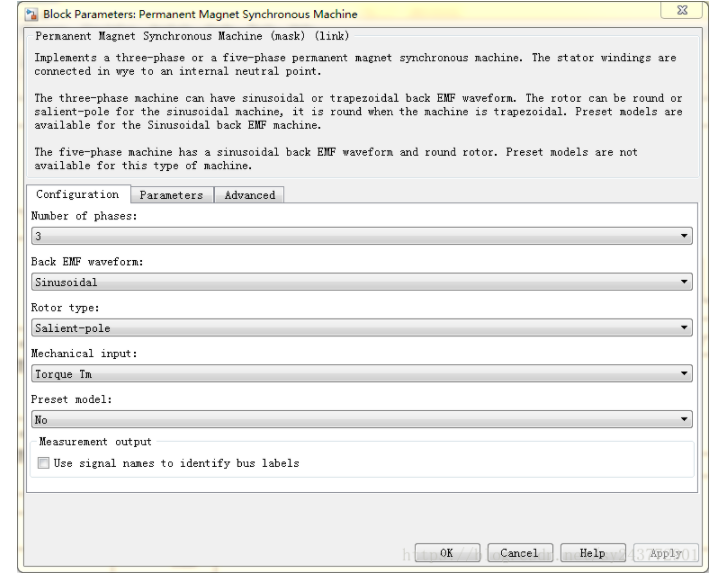
永磁同步電機的英文縮寫為PMSM,全稱 Permanent Magnet Synchronous Machine。在 library 內(nèi)搜索 Permanent 即可找到它。
number of phase 電機相數(shù)
Back EMF waveform 反電動勢波形
sinusoidal 正弦波
Rotor type 轉(zhuǎn)子類型
salient-pole 凸極
1.2 參數(shù)設(shè)置
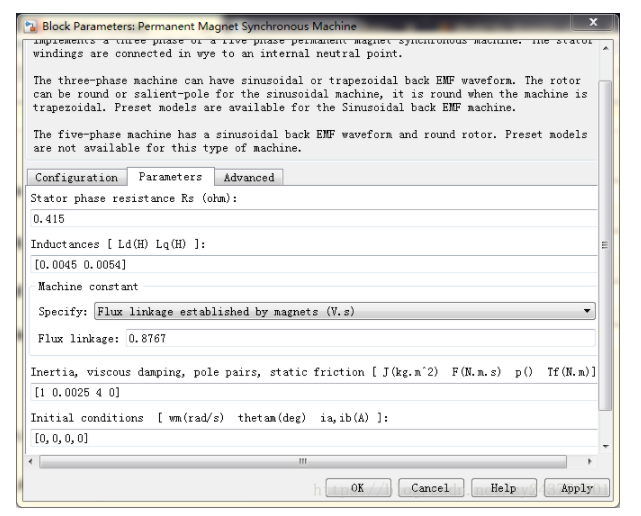
在此仿真中沒用系統(tǒng)自帶的典型電壓模型,為了便于以后實驗,用的是實驗室已有電機的參數(shù)。
1.3 高級設(shè)置
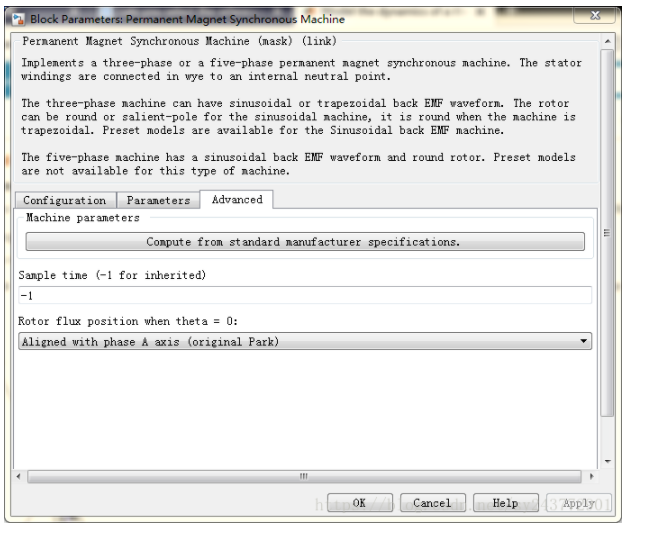
注意這里的 Roto flux position when theta = 0 一定要選擇
Aligned with phase A axis 跟隨A相,因為當theta=0 時磁通不跟隨A相,會出現(xiàn)非常嚴重的相位錯位,導致PI調(diào)節(jié)器失效。
2 變換環(huán)節(jié)的設(shè)置
2.1 3/2 變換 和 2/2變換 functions的設(shè)置
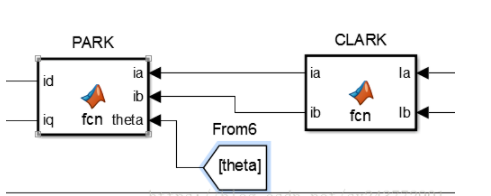
function 內(nèi)數(shù)學變換程序:
function [ia,ib] = fcn(Ia,Ib)
ia=sqrt(2/3)*sqrt(3/2)*Ia; % 3/2變換 N3/N2 = 2/3 且 ia + ib + ic = 0
ib=sqrt(2/3)*(1/sqrt(2)*Ia+sqrt(2)*Ib);
end
function [id,iq] = fcn(ia,ib,theta)
%#codegen
id=ia*cos(theta)+ib*sin(theta); % 2/2變換
iq=-ia*sin(theta)+ib*cos(theta);
end
2.2 兩相旋轉(zhuǎn)變兩相靜止部分function設(shè)置
function Uref = fcn(uq,ud,iq,id,theta)
ua_out=ud*cos(theta)-uq*sin(theta);
ub_out=ud*sin(theta)+uq*cos(theta);
Uref=[ua_out;ub_out];
end
以上三個變換的程序編寫均以永磁同步電機矢量控制(二)——坐標變換中所寫公式編寫。
3 PI模塊的搭建
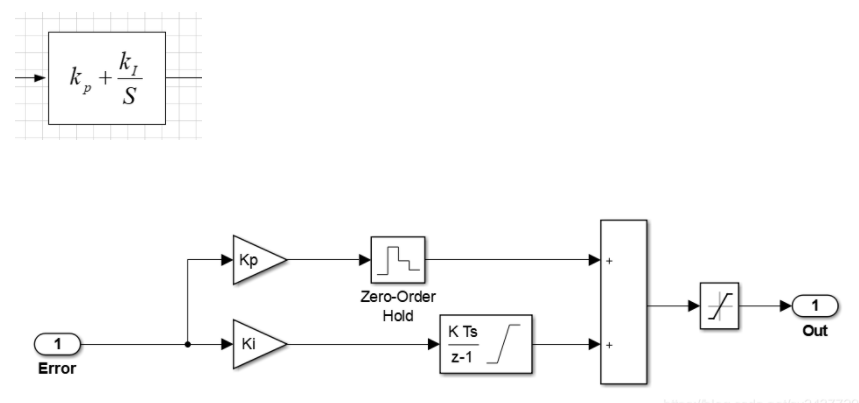
PI模塊的搭建主要來源于其傳遞函數(shù):
3.1 具體PI 參數(shù)的計算
由電機參數(shù)
Rs = 0.415
Lq = 0.0054
Ld = 0.0045
J = 1
B = 0.0025
flux = 0.8767
P= 4
由 PI 參數(shù)整定文章內(nèi)公式計算出得

如圖所示將PI參數(shù)輸入到PI調(diào)節(jié)器中,上圖是我自己做的一個VB小程序,把計算公式寫在里面了,算是偷個懶。
4 實驗結(jié)果
4.1 空載輸出特性
轉(zhuǎn)速波形
穩(wěn)定性:系統(tǒng)無明顯的超調(diào),在到達給定轉(zhuǎn)速后很快穩(wěn)定下來。穩(wěn)定性優(yōu)良。
準確性:準確跟隨速度給定。準確性優(yōu)良。
快速性:由于電機較大,轉(zhuǎn)動慣量達到了J=1,所以0.65s左右轉(zhuǎn)速升到800r/min,可見系統(tǒng)的快速性還是相當不錯的。
定子三相電流波形
三相定子電流呈現(xiàn)較好的正弦特性,在到達給定轉(zhuǎn)速后,迅速降低,到0-0.2附近波動。
電機轉(zhuǎn)矩波形
電機轉(zhuǎn)矩波形穩(wěn)定在額定轉(zhuǎn)矩附近,在到達給定轉(zhuǎn)速后迅速降低,進行維持穩(wěn)定轉(zhuǎn)速的微調(diào)。
4.2 帶載輸出特性
4.2.1 帶20N負載輸出特性
轉(zhuǎn)速波形
基本無明顯速度降落。放大后速降在0.5很快就恢復到給定值。
三相定子電流波形
三相定子電流正弦特性完好,且在給定負載后反映迅速。
轉(zhuǎn)矩波形
轉(zhuǎn)矩波形穩(wěn)定,在到達給定后迅速降低,突加負載后迅速上升,性能優(yōu)良。
4.2.2 帶100N負載輸出特性
轉(zhuǎn)速波形
在突加負載100N后,速度有一個較小的降落后迅速的返回給定值,性能優(yōu)良。
三相定子電流波形
定子三相電流與20N負載一個明顯的區(qū)別,在突加負載后,定子電流先增大到額定電流大小,按照最大電流升速,再減小至100N轉(zhuǎn)矩所需要的電流大小,穩(wěn)定轉(zhuǎn)速,證明PI調(diào)節(jié)器參數(shù)設(shè)定合理,既有良好的抗擾性能。
轉(zhuǎn)矩波形
同上,100N轉(zhuǎn)矩波形與20N轉(zhuǎn)矩波形的區(qū)別也在于,在突加負載后,轉(zhuǎn)矩先增大到最大轉(zhuǎn)矩,以最大的轉(zhuǎn)矩升速,再減小至維持給定轉(zhuǎn)速的轉(zhuǎn)矩大小。
小結(jié):按照解小剛老師論文的闡述,以及陳伯時書籍上異步電動機矢量控制的對照,對永磁同步電機,坐標變換解耦以及PI參數(shù)設(shè)定,形成了整個仿真基礎(chǔ)。實驗效果較為良好,學到了很多永磁同步電機的知識。
編輯:hfy
-
永磁同步電機
+關(guān)注
關(guān)注
28文章
876瀏覽量
50327 -
異步電動機
+關(guān)注
關(guān)注
5文章
363瀏覽量
24752 -
電流波形
+關(guān)注
關(guān)注
1文章
53瀏覽量
6626
發(fā)布評論請先 登錄
永磁無刷電機及其驅(qū)動技術(shù)
永磁同步電機自適應(yīng)高階滑模Type-2模糊控制
永磁同步電機的內(nèi)模直接轉(zhuǎn)矩控制
永磁同步電機(PMSM)調(diào)速系統(tǒng)的智能控制算法研究
永磁同步電機矢量控制策略分析
基于EasyGo Vs工具包和Nl veristand軟件進行的永磁同步電機實時仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論