") 一種自動駕駛汽車的控制系統(tǒng)和方法
一種自動駕駛汽車的控制系統(tǒng)和方法
隨著自動駕駛技術(shù)的發(fā)展,目前越來越多的汽車開始部署高級的駕駛輔助系統(tǒng)(ADAS)。
當(dāng)前市面上的ADAS系統(tǒng),大多將自動駕駛相關(guān)功能的域控制器做得安全等級低于執(zhí)行器責(zé)任機(jī)構(gòu)(如底盤域,動力域),即:將安全主責(zé)通過需求分解分配到電子穩(wěn)定系統(tǒng)ESP、電動助力轉(zhuǎn)向系統(tǒng)EPS、電動汽車整車控制器VCU等控制器,同時依據(jù)“駕駛員在故障下可順利接管”這一需求做高安全級別設(shè)計。
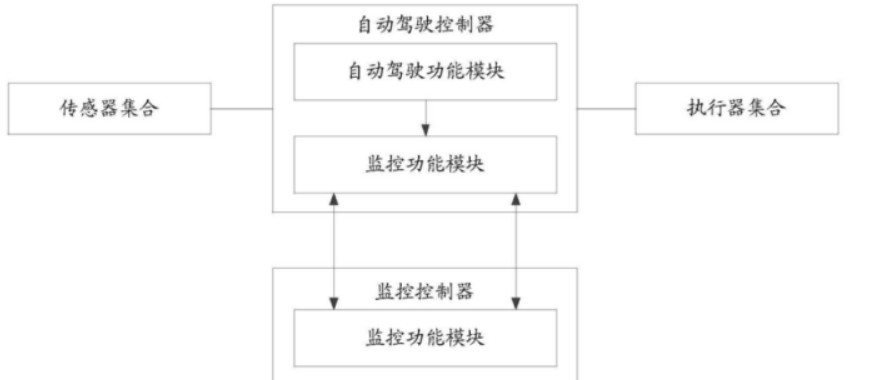
如上圖,為現(xiàn)有的自動駕駛控制系統(tǒng)的結(jié)構(gòu)圖,這種自動駕駛控制系統(tǒng)屬于Fail-Safe架構(gòu)。此架構(gòu)下,當(dāng)自動駕駛控制系統(tǒng)的控制鏈路產(chǎn)生故障時,會切斷執(zhí)行器或限制執(zhí)行器的性能。這種系統(tǒng)的安全邏輯是:當(dāng)出現(xiàn)故障時,切斷故障源,同時調(diào)整系統(tǒng)狀態(tài)盡可能使駕駛員能順利接管。
對于L2及以下的系統(tǒng),這種架構(gòu)自動駕駛控制系統(tǒng)還可以保障安全,但是對于高于L2的系統(tǒng),倘若駕駛員沒有做好準(zhǔn)備時,這種方式甚至可能是致命的。此外,在極端場景中,如果高速行駛中附近有相鄰車時,若系統(tǒng)故障導(dǎo)致車輛失控,駕駛員也在短期內(nèi)無法接管車輛。
為此,為了追求安全可靠的行駛體驗,小鵬汽車在19年5月23日申請了一項名為“一種自動駕駛控制系統(tǒng)和方法”的發(fā)明專利(申請?zhí)枺?01910435840.3),申請人為廣州小鵬汽車科技有限公司。
根據(jù)該專利公開的資料,讓我們一起來看看這項自動駕駛控制系統(tǒng)吧。
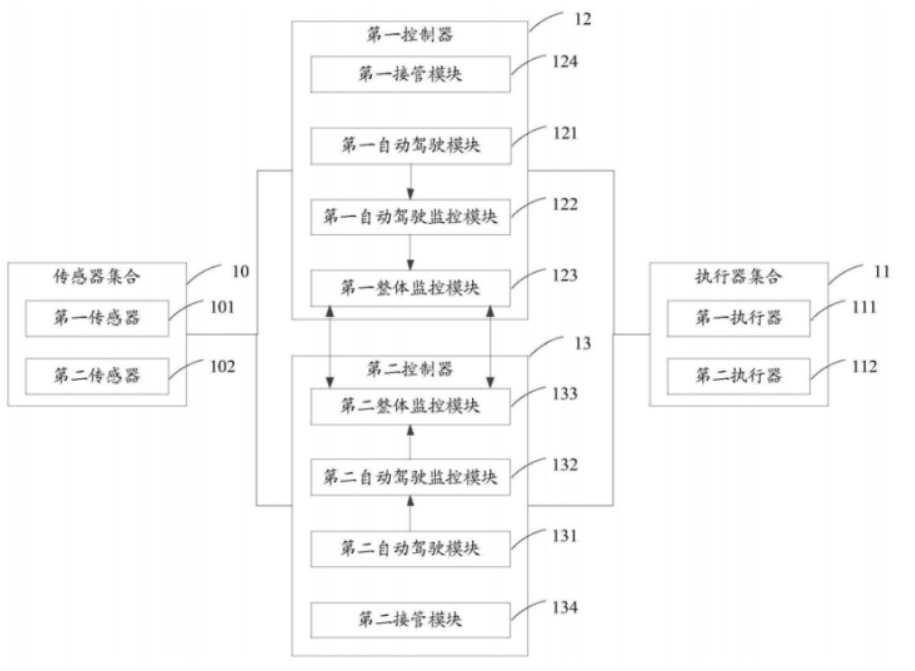
如上圖,為該專利發(fā)明的自動駕駛控制的結(jié)構(gòu)圖,其中主要包括傳感器系統(tǒng)、第一控制器12、第二控制器13以及執(zhí)行器集合。第一控制器中包含有第一自動駕駛模塊121,該模塊用于接收傳感器發(fā)送的數(shù)據(jù),并根據(jù)傳感器數(shù)據(jù)生成控制指令。
這些數(shù)據(jù)包括例如車、人、動物、障礙物等,也可以是車輛行駛時與周圍車輛的距離、相對速度、加速度以及坐標(biāo)等信息。而在第二控制器中包含有駕駛監(jiān)控模塊,這個模塊可以判斷目前無人駕駛車輛是否處于正常行駛狀態(tài)以及是否有故障發(fā)生,其流程如下圖所示。
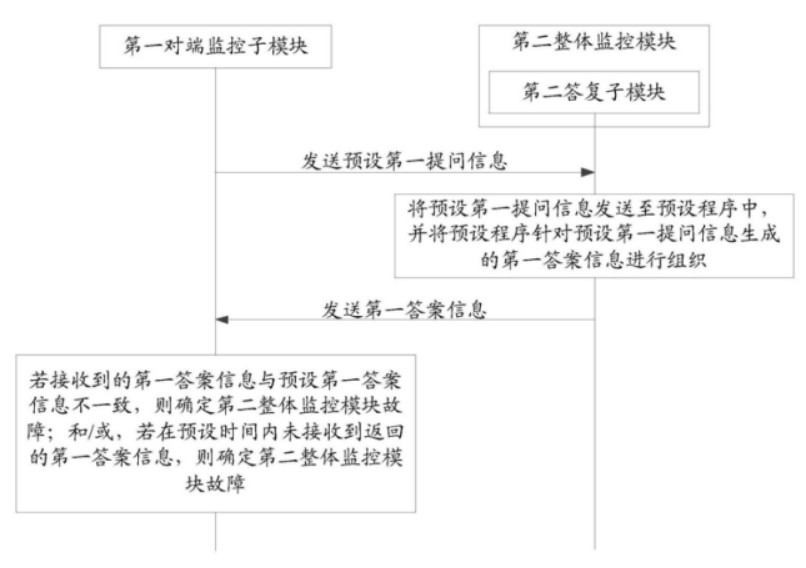
上圖為端監(jiān)控子模塊的工作流程的示意圖,該模塊用于向第二整體監(jiān)控模塊發(fā)送預(yù)設(shè)提問信息,如果接收到的答案與預(yù)設(shè)答案不相同,則可以判斷第二監(jiān)控模塊發(fā)生了故障。這個過程可以理解為,為了保證系統(tǒng)的穩(wěn)定性,系統(tǒng)中安裝有兩個監(jiān)控模塊,這兩個監(jiān)控模塊之間也可以互相進(jìn)行監(jiān)督,方法就是二者之間確定一種問答方法,一旦回答不同時,就可以判斷有一個模塊出了問題。
而在這種故障發(fā)生時,系統(tǒng)也會進(jìn)行進(jìn)一步判斷,而不是單純的停止無人汽車的運(yùn)行,這樣也使得車輛更加可靠,進(jìn)一步判斷的動作包括對于駕駛模塊、自動駕駛監(jiān)控模塊以及接管模塊進(jìn)行診斷,來判斷系統(tǒng)是不是已經(jīng)到了不得不熄火停車的狀態(tài)。
最后,如上圖,是這種自動駕駛控制方法的步驟流程圖,首先由控制器接收傳感器發(fā)送的傳感數(shù)據(jù),根據(jù)這些數(shù)據(jù)生成控制指令并將控制指令發(fā)送至執(zhí)行器,以及在其余控制器故障時,執(zhí)行預(yù)設(shè)安全操作。
接著,由執(zhí)行器根據(jù)控制指令執(zhí)行自動駕駛功能,而此時,第二傳感器也會將其收集到的數(shù)據(jù)通過第二控制指令發(fā)送到第二執(zhí)行器,進(jìn)行第二安全操作,這樣,系統(tǒng)中由兩組執(zhí)行器來提供雙重安全保證,也保證了駕駛的安全性。
以上就是小鵬汽車發(fā)明的自動駕駛控制系統(tǒng),這是一種追求安全性能的系統(tǒng),系統(tǒng)中設(shè)置了多組傳感器模塊、故障監(jiān)控模塊以及執(zhí)行器模塊,當(dāng)一個控制器發(fā)生故障時,能由另一個控制器接管發(fā)生故障的控制器,從而保證了自動駕駛控制系統(tǒng)的安全性,并且可以將多個自動駕駛功能分配由不同的控制器負(fù)責(zé),可以充分利用兩個控制器的性能。
關(guān)于嘉德
深圳市嘉德知識產(chǎn)權(quán)服務(wù)有限公司由曾在華為等世界500強(qiáng)企業(yè)工作多年的知識產(chǎn)權(quán)專家、律師、專利代理人組成,熟悉中歐美知識產(chǎn)權(quán)法律理論和實(shí)務(wù),在全球知識產(chǎn)權(quán)申請、布局、訴訟、許可談判、交易、運(yùn)營、標(biāo)準(zhǔn)專利協(xié)同創(chuàng)造、專利池建設(shè)、展會知識產(chǎn)權(quán)、跨境電商知識產(chǎn)權(quán)、知識產(chǎn)權(quán)海關(guān)保護(hù)等方面擁有豐富的經(jīng)驗。
責(zé)任編輯:tzh
-
電動汽車
+關(guān)注
關(guān)注
156文章
12374瀏覽量
234131 -
adas
+關(guān)注
關(guān)注
310文章
2240瀏覽量
209892 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14204瀏覽量
169586
發(fā)布評論請先 登錄
自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
NVIDIA Halos自動駕駛汽車安全系統(tǒng)發(fā)布
理想汽車推出全新自動駕駛架構(gòu)
吉利汽車自動駕駛脫困專利獲授權(quán)
AUTOSAR通信對自動駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動駕駛汽車中的應(yīng)用
PWM控制在自動駕駛汽車中的重要性
汽車雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場景
自動駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論