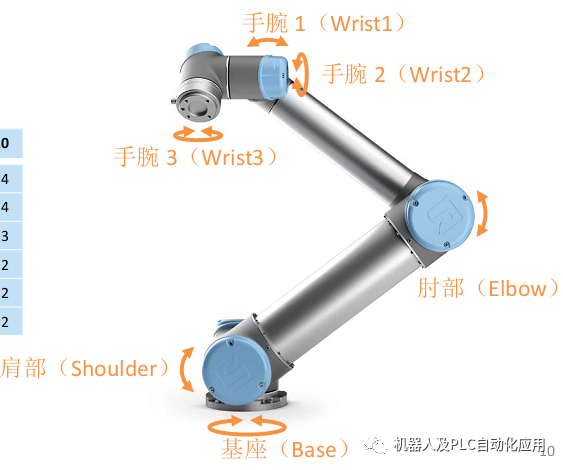
 優傲機器人簡單操作及PolyScope軟件系統介紹
優傲機器人簡單操作及PolyScope軟件系統介紹
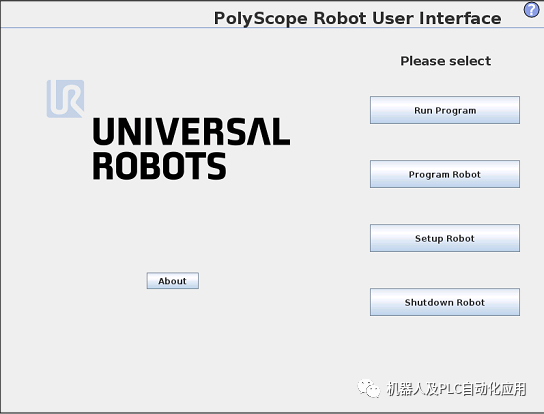
PolyScope軟件系統介紹:
PolyScope
? 優傲公司開發
? 免費更新
? Debian Linux
設置機器人
? 針對系統軟件的設置
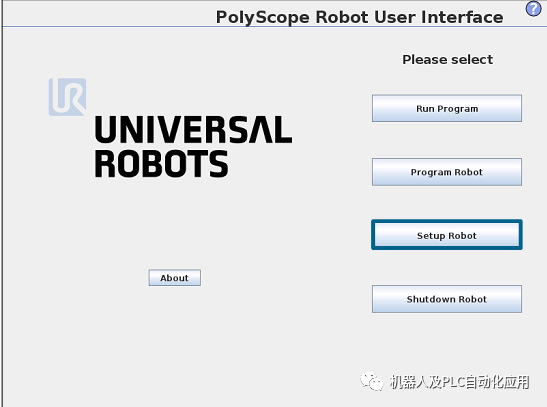
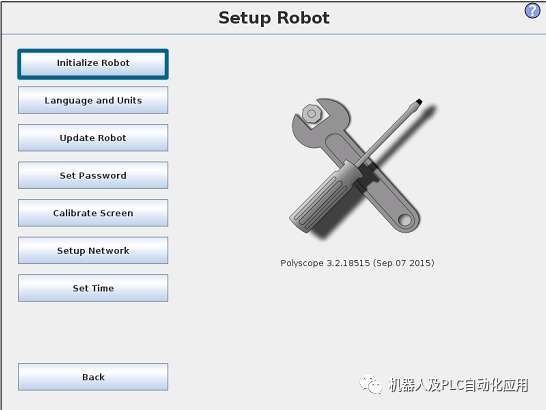
? 系統軟件設置
? 初始化機器人
? 語言和單位選擇
? 更新機器人
? 設置密碼
? 校準屏幕
? 設置網絡
? 設置時間
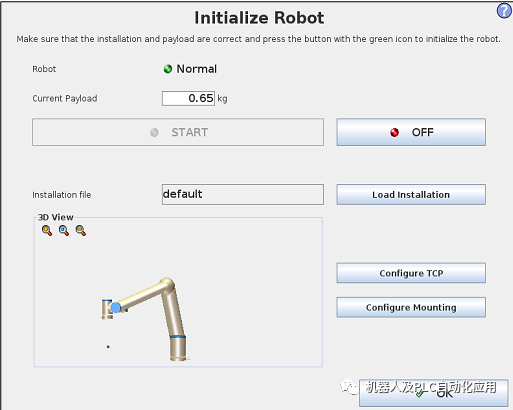
初始化機器人
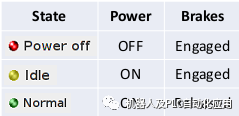
? 機器人狀態
初始化機器人
? 檢查負載設置
? 點“開”:上電
? 點“啟動”:釋放剎車
反驅動模式
當靠近碰撞區域,用反驅動模
式拉機器人手臂到安全位置
? 語言
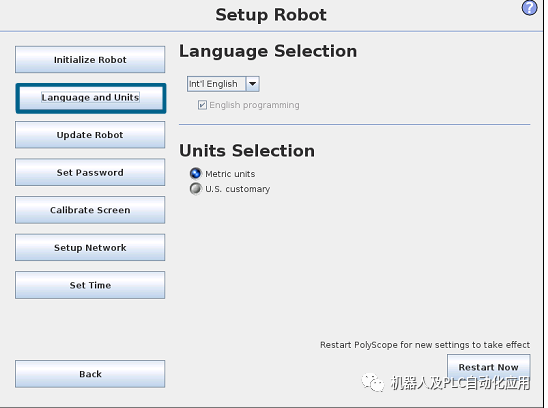
? 20 種語言
? 編程選用英語時可保持程
序指令名字為英語
單位
? 公制
? 英制
設置密碼
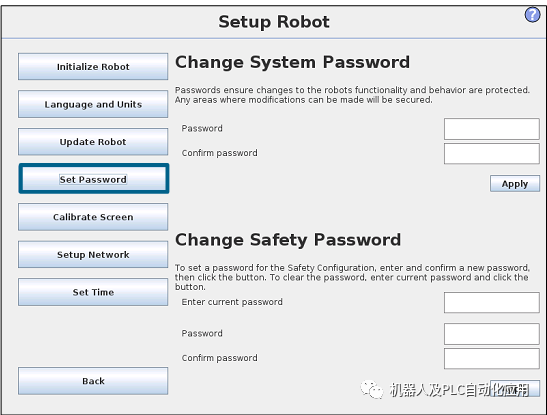
? 系統密碼
? 密碼保護限制進入軟件
? 安全密碼
? 修改安全設置時需要密碼
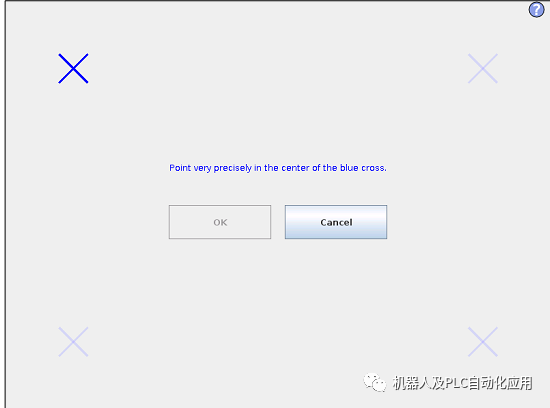
? 校準觸摸屏
? 點中四個角的校準符號
校準屏幕
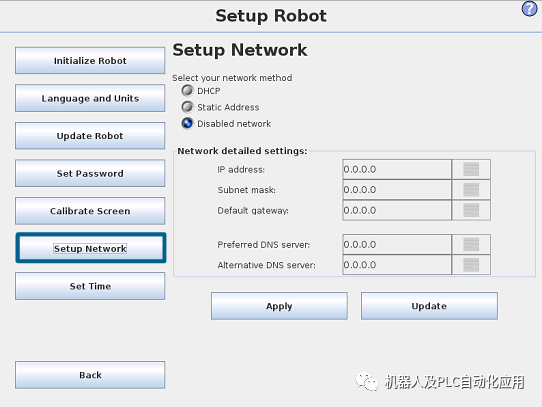
? 網絡參數配置
在這個菜單能設置機器人的IP 地址 設置網絡.
設置時間
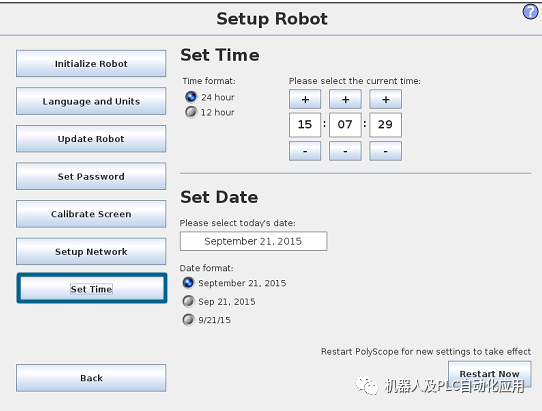
? 時間
? 時間格式
? 24 小時
? 12 小時
? 日期
? 日期格式
機器人編程
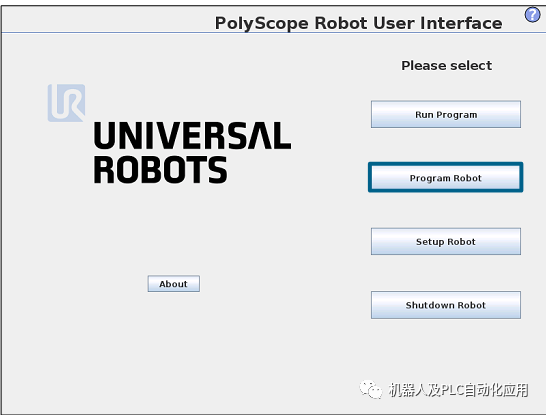
? 窗口概覽
程序
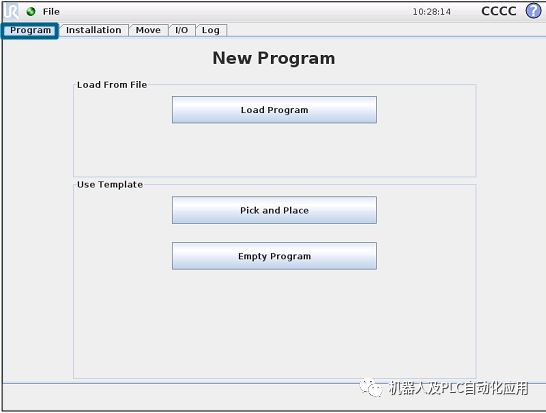
? 導入現有的程序
? 創造新程序
安裝設置窗口
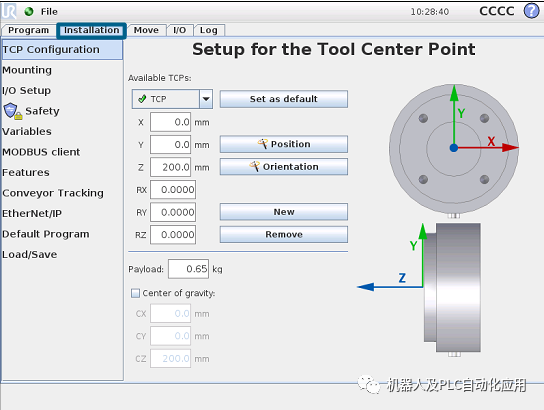
? 設置
? 環境設置
? 安全設置
移動窗口
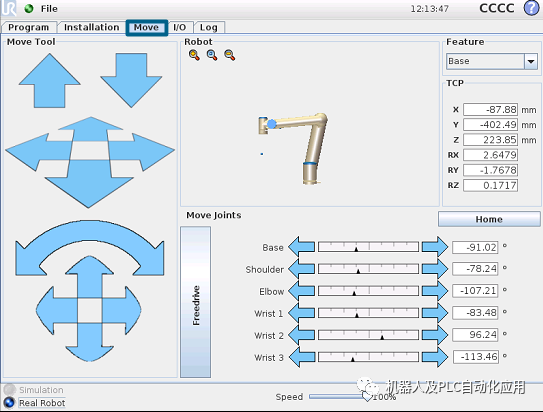
移動
? 手動示教機器人
? 顯示實際位置
責任編輯:xj
原文標題:UR 優傲機器人簡單操作
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
213文章
29498瀏覽量
211573 -
優傲機器人
+關注
關注
0文章
23瀏覽量
6151
原文標題:UR 優傲機器人簡單操作
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論