 交流電動機仿真訓練及實際設計電路圖解析
交流電動機仿真訓練及實際設計電路圖解析

我們學習了交流電動機的工作原理以及特性,以下根據課本啟動特性、調速特性、以及制動特性的知識進行仿真訓練
仿真圖:

由仿真結果得知額定工作狀態下,電動機轉速為154.234rad/s,電磁轉矩為11.5429Nm。
所以可得電動機理想空載轉速:n0=60×50/2=1500r/min。
電動機額定轉速:nN=154.234×60/2Π=1472.826r/min。
電動機額定轉矩:TN=11.5429Nm。
電動機額定轉速差:SN=(n0-nN)/n0=0.018116。
再根據轉矩表達式:T=KSR2U2/(R22+(SX20)2)可以求出常數K=5.3712×10-3,其中R2=0.408Ω、X20=2Πf1LL2=0.792H、U=220V。
所以利用matlab可以畫出上方轉矩表達式的圖像即異步電動機的固有機械特性圖:
R2=0.408;
X=0.792;
K=0.00537;
U=220;
T=(K*((1500-N)。/1500)*R2*U^2)。/(R2^2+((1500-N)。/1500).^2*X^2);
N=0:1:1600;
plot(T,N,‘r-’);
xlabel(‘電磁轉矩(Nm)’);
ylabel(‘轉速(r/min)’);
title(‘異步電動機的固有機械特性’);
axis([0 200,0 1600]);
fT=max(T);
id=find(T==fT);
fN=N(id);
text(fT,fN,num2str(fT,‘%.2f’),‘FontSize’,18);

根據上圖可以讀出電動機的臨界工作點時Tmax=164.08Nm,nm=728r/min。啟動工作點時Tst=133.601Nm。
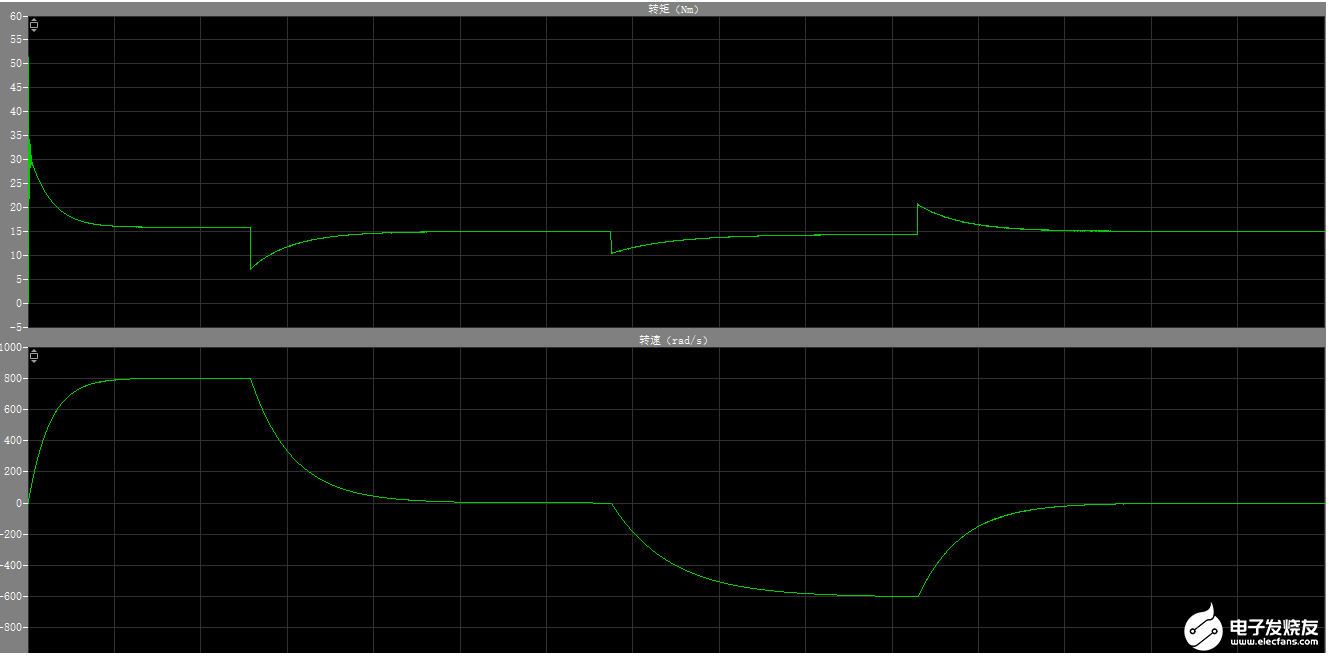
二,結合本周學習的交流電機原理及啟動、調速、制動特性,在PLECS仿真環境下控制上述三相交流異步電機帶動起重機起升機構運行。(改為繞線異步電動機)
啟動階段:采用逐級切除啟動電阻法(轉子電路串接電阻)
制動階段:采用定子電壓反接制動,當轉速到達0時,轉子上串接電阻使機械特性到達15Nm,n0=0點。
反向加速:仍然采用轉子電路串接電阻的方法
實際設計電路圖如下:

機械運動周期仿真結果圖如下:
編輯:hfy
-
電動機
+關注
關注
75文章
4158瀏覽量
98512 -
異步電動機
+關注
關注
5文章
364瀏覽量
24832 -
交流電動機
+關注
關注
2文章
85瀏覽量
14506
發布評論請先 登錄
如何正確選擇交流電動機變頻調速控制方案?






 工商網監
工商網監
評論