") 如何實(shí)時(shí)處理兩個(gè)測(cè)量站載波相位觀測(cè)量的差分方法?
如何實(shí)時(shí)處理兩個(gè)測(cè)量站載波相位觀測(cè)量的差分方法?
2020年6月我國(guó)在西昌衛(wèi)星發(fā)射中心成功發(fā)射了北斗系統(tǒng)第五十五顆導(dǎo)航衛(wèi)星,也是北斗三號(hào)的最后一顆全球組網(wǎng)衛(wèi)星。至此,北斗三號(hào)全球衛(wèi)星導(dǎo)航系統(tǒng)星座部署全面完成。
新聞出來(lái)之后,國(guó)人為之振奮,紛紛點(diǎn)贊轉(zhuǎn)發(fā)。社會(huì)各界對(duì)衛(wèi)星定位產(chǎn)業(yè)的關(guān)注度,也沖上了新高。
那么,像北斗這樣的衛(wèi)星系統(tǒng),究竟是如何實(shí)現(xiàn)定位的呢?為了實(shí)現(xiàn)更好的定位效果,它引入了哪些關(guān)鍵技術(shù)?衛(wèi)星定位產(chǎn)業(yè)的發(fā)展,正在進(jìn)入怎樣的階段?
今天這篇文章,我們就來(lái)聊聊衛(wèi)星定位系統(tǒng)的那些事兒。
什么是GNSS
首先,我們要知道,北斗和大家更為熟悉的GPS,都屬于全球?qū)Ш叫l(wèi)星系統(tǒng),也就是GNSS(Global Navigation Satellite System)。
北斗是我們中國(guó)自主研發(fā)和建設(shè)的GNSS系統(tǒng)。而GPS,是美國(guó)的GNSS系統(tǒng),也是全球最早的GNSS系統(tǒng)(開(kāi)始于1973年,1995年全面投入運(yùn)行)。
同樣具備全球覆蓋能力的GNSS系統(tǒng),還包括俄羅斯的GLONASS和歐洲的Galileo。
除了全球性的衛(wèi)星系統(tǒng)之外,GNSS還包括一些區(qū)域性的系統(tǒng)(例如日本的準(zhǔn)天頂系統(tǒng)QZSS和印度的IRNSS),以及增強(qiáng)系統(tǒng)(例如美國(guó)的WAAS、日本的MSAS和歐盟的EGNOS等)。增強(qiáng)系統(tǒng),是基于全球或區(qū)域系統(tǒng)的輔助系統(tǒng),可以滿(mǎn)足更多場(chǎng)景需求。
GNSS的類(lèi)別
GNSS的作用是定位和導(dǎo)航。準(zhǔn)確來(lái)說(shuō),它還有一個(gè)普通人不太注意的功能,那就是授時(shí)。
學(xué)術(shù)上對(duì)GNSS的定義是這么說(shuō)的:
全球?qū)Ш叫l(wèi)星系統(tǒng),是能在地球表面或近地空間的任何地點(diǎn),為用戶(hù)提供全天候的三維坐標(biāo)、速度以及時(shí)間信息的空基無(wú)線(xiàn)電導(dǎo)航定位系統(tǒng)。
看明白了吧,三維坐標(biāo)、速度、時(shí)間信息,是GNSS的必備功能。這三個(gè)信息,我們通常稱(chēng)之為PVT(Position Velocity and Time)。
值得一提的是,咱們國(guó)家的北斗系統(tǒng)還有一個(gè)獨(dú)特的功能,那就是短報(bào)文(也就是文字信息)。在關(guān)鍵時(shí)候,這個(gè)功能可以發(fā)揮很大的作用。
GNSS的工作原理
那么,GNSS是如何幫助用戶(hù)獲取PVT信息的呢?
我們來(lái)做一個(gè)非常簡(jiǎn)單的立體幾何數(shù)學(xué)題。
眾所周知,地球表面的任何一個(gè)位置,都有它的三維坐標(biāo),也就是經(jīng)度、緯度和高程。它頭頂上的GNSS衛(wèi)星,也有自己的三維坐標(biāo)。
那么,我們把整個(gè)空間看成一個(gè)坐標(biāo)系,可以畫(huà)一個(gè)立方體。立方體的兩個(gè)對(duì)角,分別是用戶(hù)和衛(wèi)星,如下:
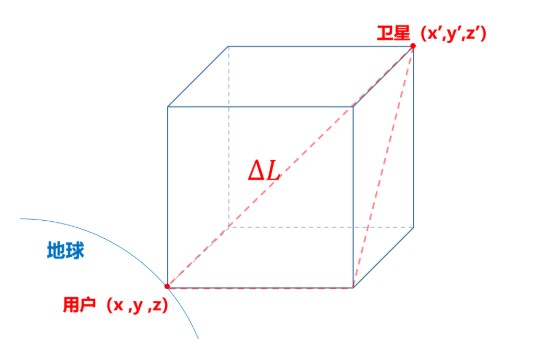
根據(jù)中學(xué)立體幾何的知識(shí),我們可以知道,衛(wèi)星和用戶(hù)之間的距離△L(這個(gè)距離也被稱(chēng)為“偽距”),是:
衛(wèi)星的坐標(biāo)是(x’,y’,z’),這是已知的。用戶(hù)的坐標(biāo)是(x,y,z),這是未知的。
與此同時(shí),衛(wèi)星可以給用戶(hù)終端發(fā)信號(hào),信號(hào)的傳輸速度基本上幾乎等同于光速c。而衛(wèi)星上面有精度極高的原子鐘,所以知道自己的時(shí)間是t。假設(shè)用戶(hù)終端的時(shí)間是t’,那么,衛(wèi)星和用戶(hù)之間的距離△L,又可以通過(guò)下面這個(gè)公式算出:
兩個(gè)公式一合并,就變成了:

一個(gè)公式里有4個(gè)未知數(shù)(x,y,z,t),大家都懂的,這個(gè)公式是解不出來(lái)滴。
怎么才能解出來(lái)?再列三個(gè)公式唄。
也就是說(shuō),再找3個(gè)衛(wèi)星的坐標(biāo)值,組成4個(gè)四元方程,就OK了。
這就是為什么,一個(gè)用戶(hù)終端要想解算出自己的準(zhǔn)確位置,必須要有至少4顆衛(wèi)星。
很簡(jiǎn)單的數(shù)學(xué)知識(shí),不難理解吧?
GNSS的關(guān)鍵技術(shù)
雖然GNSS的工作原理看似簡(jiǎn)單,但真正想要把這個(gè)系統(tǒng)做好,是非常困難的。
衡量一個(gè)GNSS系統(tǒng)是否足夠優(yōu)秀,主要看它的精度、速度和靈敏度。這個(gè)速度,主要是指從啟動(dòng)定位設(shè)備到首次正常定位所需的時(shí)間,也稱(chēng)為T(mén)TFF(Time to First Fix)。
影響GNSS定位精度的主要原因,是誤差。誤差既來(lái)自系統(tǒng)的內(nèi)部,也來(lái)自外部。例如穿透電離層和對(duì)流層時(shí)產(chǎn)生的誤差,還有衛(wèi)星高速移動(dòng)產(chǎn)生的多普勒效應(yīng)引起的誤差,以及多徑效應(yīng)誤差、通道誤差、衛(wèi)星鐘誤差、星歷誤差、內(nèi)部噪聲誤差等等。
這些誤差,有些是可以完全消除的,也有些是無(wú)法消除或只能部分消除的。消除水平的高低,直接決定了系統(tǒng)的準(zhǔn)確性和可靠性。
為了更好地消除誤差、提高反應(yīng)速度,GNSS會(huì)引入一些天基或陸基的輔助手段。結(jié)合輔助手段的GNSS,也被稱(chēng)為A-GNSS。A就是Assisted,“輔助”的意思。
現(xiàn)在比較常用的,是通過(guò)陸基的移動(dòng)通信網(wǎng)絡(luò),傳送增強(qiáng)改正數(shù)據(jù),提供輔助信息,加強(qiáng)和加快衛(wèi)星導(dǎo)航信號(hào)的搜索跟蹤性能和速度,縮短定位時(shí)間,提高定位精度。
A-GNSS系統(tǒng)架構(gòu)
除了A-GNSS之外,GNSS還引入了一些關(guān)鍵技術(shù),幫助提升系統(tǒng)性能。
首先是RTK技術(shù)。
RTK(Real-time kinematic),稱(chēng)為實(shí)時(shí)動(dòng)態(tài)差分法,又稱(chēng)為載波相位差分技術(shù),是實(shí)時(shí)處理兩個(gè)測(cè)量站載波相位觀測(cè)量的差分方法,包括傳統(tǒng)RTK和網(wǎng)絡(luò)RTK。
傳統(tǒng)RTK模式,只有一個(gè)基準(zhǔn)站。網(wǎng)絡(luò)RTK模式,有多個(gè)基準(zhǔn)站。
以網(wǎng)絡(luò)RTK為例,多個(gè)基準(zhǔn)站會(huì)采集監(jiān)測(cè)數(shù)據(jù)發(fā)給控制中心,控制中心針對(duì)數(shù)據(jù)進(jìn)行粗差剔除后,再進(jìn)行解算,并最終將改正信息發(fā)給用戶(hù)。
網(wǎng)絡(luò)RTK的覆蓋范圍很快,可以距離用戶(hù)上百公里。而且,網(wǎng)絡(luò)RTK擁有更高的精度和穩(wěn)定性。
然后是慣性導(dǎo)航技術(shù)。
GNSS衛(wèi)星定位雖然方便,但容易受客觀條件的影響。例如隧道、森林等路段,GNSS信號(hào)容易中斷。此時(shí),就需要臨時(shí)采用其它的輔助手段。
航位推算(DR,Dead Reckoning),就是一種自主式的慣性導(dǎo)航技術(shù)。通過(guò)采用加速度傳感器和陀螺儀傳感器,結(jié)合一些專(zhuān)用算法,它可以根據(jù)用戶(hù)終端(例如車(chē)輛)的初始位置信息以及傳感器獲得的信息,推算出用戶(hù)終端在盲區(qū)位置的高精度導(dǎo)航數(shù)據(jù)。
DR和GNSS有很強(qiáng)的互補(bǔ)性,一方面DR可以幫助補(bǔ)盲,另一方面GNSS也能對(duì)DR進(jìn)行實(shí)時(shí)糾偏,幫助DR推測(cè)出更準(zhǔn)確的位置。
此外,就是雙頻技術(shù)。
所謂雙頻,很好理解,就是GNSS模組同時(shí)支持多個(gè)不同GNSS系統(tǒng)的不同頻段,以此增強(qiáng)信號(hào)的接收能力。
四大導(dǎo)航系統(tǒng)工作頻率表
GNSS的應(yīng)用場(chǎng)景
在眾多黑科技的加持下,GNSS系統(tǒng)目前已經(jīng)具備極高的響應(yīng)速度和定位精度,也有非常可靠的穩(wěn)定性。行業(yè)主流GNSS模組的TTFF速度目前已經(jīng)提升為秒級(jí),定位精度也從十米級(jí)、米級(jí)提升為亞米級(jí)、分米級(jí)甚至厘米級(jí)。
這些指標(biāo)已經(jīng)完全能夠滿(mǎn)足大部分的行業(yè)應(yīng)用需求。例如交通、水利、減災(zāi)、海事、勘探、建筑等領(lǐng)域,現(xiàn)在都在大量使用GNSS模組。
上述場(chǎng)景中,應(yīng)用最為廣泛且最值得關(guān)注的,是車(chē)載GNSS模組的應(yīng)用。
隨著“萬(wàn)物互聯(lián)”時(shí)代的到來(lái),車(chē)聯(lián)網(wǎng)作為核心應(yīng)用,正在進(jìn)入爆發(fā)期。
雖然我們總是強(qiáng)調(diào)5G對(duì)車(chē)聯(lián)網(wǎng)的重要意義,但不可忽視的是,GNSS定位導(dǎo)航服務(wù),同樣是車(chē)聯(lián)網(wǎng)發(fā)展的必備條件。
試想一下,如果沒(méi)有高性能GNSS車(chē)載模組的支持,車(chē)輛連自己的準(zhǔn)確位置信息都不知道,可以說(shuō)是寸步難行。
GNSS車(chē)載模組能夠?yàn)?a href="http://www.asorrir.com/tags/自動(dòng)駕駛/" target="_blank">自動(dòng)駕駛、遠(yuǎn)程駕駛提供了可靠的定位、導(dǎo)航和測(cè)距數(shù)據(jù)來(lái)源,是ADAS(高級(jí)駕駛輔助系統(tǒng))不可或缺的組成部分。
除了保障正常駕駛之外,GNSS車(chē)載模組還可以用于車(chē)輛防盜、緊急救援、集群調(diào)度、車(chē)隊(duì)管理等應(yīng)用需求。
對(duì)于企業(yè)來(lái)說(shuō),車(chē)輛是重要的運(yùn)營(yíng)資產(chǎn)。車(chē)輛的位置信息,是重要的管理數(shù)據(jù)。
GNSS車(chē)載模組可以幫助企業(yè)掌握實(shí)時(shí)數(shù)據(jù),跟蹤車(chē)輛位置,更有效地管理這些資產(chǎn)。對(duì)于一些特種車(chē)輛,例如危險(xiǎn)品運(yùn)輸車(chē),GNSS車(chē)載模組的重要性更是不言而喻。
目前,物聯(lián)網(wǎng)模組行業(yè)龍頭移遠(yuǎn)通信已有多款車(chē)規(guī)級(jí)GNSS車(chē)載模組投入市場(chǎng),包括LG69T/L26-DR/L26-T/L26-P等多個(gè)型號(hào)產(chǎn)品,均取得了不錯(cuò)的反響。
移遠(yuǎn)通信車(chē)規(guī)級(jí)雙頻高精度定位模組LG69T,支持RTK和DR技術(shù),在大型整車(chē)廠及Tier 1客戶(hù)中備受青睞。該模組嚴(yán)格按照IATF 16949:2016汽車(chē)行業(yè)質(zhì)量管理體系標(biāo)準(zhǔn)而制造,其關(guān)鍵器件符合AEC-Q100標(biāo)準(zhǔn)要求,可同時(shí)接收多個(gè)GNSS衛(wèi)星信號(hào),并在數(shù)秒內(nèi)收斂到厘米級(jí)定位精度——在開(kāi)闊環(huán)境下,可以輸出精度5厘米的定位數(shù)據(jù)。即使在諸如城市峽谷等復(fù)雜環(huán)境中,LG69T也可實(shí)現(xiàn)亞米級(jí)精度,全面提升定位性能。據(jù)悉,LG69T有望最早在2021年量產(chǎn)的車(chē)型中投入使用。
移遠(yuǎn)通信L26-DR支持DR慣性導(dǎo)航技術(shù),集成了6軸傳感器和GNSS算法引擎,具備出色的融合定位性能,可在隧道等無(wú)GNSS信號(hào)環(huán)境下實(shí)現(xiàn)1-2米定位精度,為追蹤器、T-Box、車(chē)載導(dǎo)航、車(chē)隊(duì)管理、物流信息管理等等汽車(chē)、工業(yè)和消費(fèi)類(lèi)應(yīng)用提供了理想選擇。
結(jié) 語(yǔ)
經(jīng)過(guò)數(shù)十年的發(fā)展,GNSS系統(tǒng)從當(dāng)初的GPS一家獨(dú)大,到現(xiàn)在變成GPS、北斗、GLONASS、伽利略等多系統(tǒng)共存,可以說(shuō)是取得了長(zhǎng)足的進(jìn)步。如今的GNSS系統(tǒng),已經(jīng)具備提供全方位、全天候、高精度、高速率定位導(dǎo)航服務(wù)的能力。
GNSS變成了重要的國(guó)家級(jí)數(shù)字化基礎(chǔ)設(shè)施,對(duì)推動(dòng)數(shù)字經(jīng)濟(jì)發(fā)展有重要意義。圍繞GNSS,目前已經(jīng)衍生出了一系列具有增值潛力的服務(wù)場(chǎng)景。越來(lái)越多的公司企業(yè),正在加入GNSS的上下游產(chǎn)業(yè)鏈。
責(zé)任編輯:pj
-
衛(wèi)星導(dǎo)航
+關(guān)注
關(guān)注
3文章
240瀏覽量
27313 -
GNSS
+關(guān)注
關(guān)注
9文章
844瀏覽量
49069 -
通信網(wǎng)絡(luò)
+關(guān)注
關(guān)注
21文章
2074瀏覽量
52778
發(fā)布評(píng)論請(qǐng)先 登錄
動(dòng)態(tài)差分技術(shù)突破:頂堅(jiān)RTK高精度執(zhí)法儀實(shí)現(xiàn)鐵路隱患排查精準(zhǔn)防控

電壓放大器在線(xiàn)性相位調(diào)制雙零差干涉儀位移測(cè)量實(shí)驗(yàn)中的應(yīng)用

相位測(cè)量儀工作原理,相位測(cè)量儀怎么使用
使用ADS1258的內(nèi)部差分模式測(cè)量電阻兩端的電壓,測(cè)量值相差很多是為什么?
AFE4404 INP和INM這兩個(gè)引腳為什么需要差分輸入,這種差分輸入的好處是?
使用TDC去測(cè)量pwm兩個(gè)波形相位延時(shí)時(shí)間,如何去設(shè)計(jì)TDC7201的外圍電路?
兩個(gè)高速ADC的CLK時(shí)鐘如何做到同步無(wú)相位差?
GNSS RTK差分基準(zhǔn)站是什么?RTK差分基站應(yīng)用在哪些領(lǐng)域?

示波器差分探頭使用
一文弄懂實(shí)時(shí)動(dòng)態(tài)載波相位差分技術(shù)和偽距差分技術(shù)的區(qū)別

差分探頭是否可以進(jìn)行單端測(cè)量?
差分探頭在測(cè)量開(kāi)關(guān)損耗中的應(yīng)用
差分放大電路輸入與輸出的大小和相位關(guān)系
差分放大電路差模放大倍數(shù)的計(jì)算方法
測(cè)量太赫茲(THz)信號(hào)相位噪聲解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論