") LabVIEW實時控制器擔(dān)任著中央系統(tǒng)控制器的角色?
LabVIEW實時控制器擔(dān)任著中央系統(tǒng)控制器的角色?

大規(guī)模的多輸入多輸出(MIMO)是5G無線通訊研究中一個令人興奮的領(lǐng)域。對下一代無線數(shù)據(jù)通訊網(wǎng)絡(luò),它將帶來顯著的進(jìn)步,擁有在更高的數(shù)據(jù)速率下以更高的可靠性容納更多用戶同時消耗更低功耗的能力。使用NI 大規(guī)模MIMO的應(yīng)用程序框架,研究者可以快速搭建128天線的MIMO測試平臺,采用一流的LabVIEW系統(tǒng)級設(shè)計軟件和頂尖的NI USRP? RIO軟件無線電硬件,來進(jìn)行大規(guī)模天線系統(tǒng)的快速原型開發(fā)。使用一套簡單且可應(yīng)用于創(chuàng)建基于FPGA邏輯和高性能處理優(yōu)化部署的設(shè)計流程,該領(lǐng)域的研發(fā)者能夠使用統(tǒng)一的軟件和硬件設(shè)計流程來滿足這些高度復(fù)雜系統(tǒng)的原型設(shè)計需求。
內(nèi)容
大規(guī)模MIMO產(chǎn)品原型概述
大規(guī)模MIMO系統(tǒng)架構(gòu)
LabVIEW系統(tǒng)設(shè)計環(huán)境
基站收發(fā)信機(jī)(BTS)軟件架構(gòu)
用戶設(shè)備
大規(guī)模多入多出(MIMO)簡介
隨著移動設(shè)備的數(shù)量和人們所使用的無線數(shù)據(jù)流量的指數(shù)級增長,驅(qū)使著研究人員對于新技術(shù)和新方法的探究以解決這一日益增長的需求。下一代的無線數(shù)據(jù)網(wǎng)絡(luò),被稱作第五代移動通訊技術(shù)或 5G,必須要解決容量限制,以及一些現(xiàn)有通信系統(tǒng)中存在的挑戰(zhàn),諸如網(wǎng)絡(luò)的可靠性、覆蓋率、能效性、和延遲性等。大規(guī)模MIMO作為5G技術(shù)的一種實現(xiàn)方案,通過在基站收發(fā)信機(jī)(BTS)上使用大量的天線(超過64根)實現(xiàn)了更大的無線數(shù)據(jù)流量和連接可靠性。這種方式從根本上改變了現(xiàn)有標(biāo)準(zhǔn)的基站收發(fā)信機(jī)架構(gòu),現(xiàn)有標(biāo)準(zhǔn)只使用了最多8根天線組成的扇形拓?fù)洹S捎趽碛袛?shù)以百計的天線單元,大規(guī)模MIMO可以使用預(yù)編碼技術(shù)集將能量集中到目標(biāo)移動終端上,從而降低了輻射功率。通過把無限能量指向到特定用戶,輻射功率降低,同時對于其他用戶的干擾也降低。這一特性對于目前受干擾限制的蜂窩網(wǎng)絡(luò)來說是非常有吸引力的。如果大規(guī)模MIMO的想法真的可以實現(xiàn),那么未來的5G網(wǎng)絡(luò)一定會變得更快,能夠容納更多的用戶且具有更高的可靠性和更高的能效。
由于大規(guī)模MIMO使用了較多的天線單元,因而面臨了一些現(xiàn)有網(wǎng)絡(luò)未遇到過的系統(tǒng)挑戰(zhàn)。比如說,當(dāng)前基于LTE或LTE-A的數(shù)據(jù)網(wǎng)絡(luò)所需的導(dǎo)頻開銷是與天線的數(shù)量成比例的。而大規(guī)模MIMO管理了大量時分復(fù)用的天線的開銷,在上下行之間具有信道互易性。信道互易性使得上行導(dǎo)頻獲取的通道狀態(tài)信息可以在下行鏈路的預(yù)編碼器中被使用。其他更多實現(xiàn)大規(guī)模多入多出的挑戰(zhàn)還包括:在一個或多個數(shù)量級下來確定數(shù)據(jù)總線和接口的規(guī)模;以及在眾多獨立的射頻收發(fā)器之間進(jìn)行分布式的同步。
這些有關(guān)定時、處理以及數(shù)據(jù)收集上的挑戰(zhàn)使得原型化驗證變得更為重要。為了讓研發(fā)者能夠證實對應(yīng)理論,這就意味著需要把理論工作轉(zhuǎn)移到實際的測試臺上。通過使用真實應(yīng)用場景中的實際波形,研發(fā)者開發(fā)出產(chǎn)品原型并確定大規(guī)模MIMO的技術(shù)可行性和商業(yè)可行性。就新型無線標(biāo)準(zhǔn)和技術(shù)來說,把概念轉(zhuǎn)化為產(chǎn)品原型的時間就直接影響到了實際部署和商業(yè)化的進(jìn)程。研發(fā)者能越快地開發(fā)出產(chǎn)品原型,就意味著社會能越早地受益于這項創(chuàng)新技術(shù)。
大規(guī)模MIMO產(chǎn)品原型概述
下面所述的是一個完整的大規(guī)模MIMO應(yīng)用程序框架。它包含了搭建世界上最通用的、靈活的、可擴(kuò)展的大規(guī)模MIMO測試臺所需的硬件和軟件,該測試臺支持實時處理以及在研發(fā)團(tuán)隊所感興趣的頻段和帶寬上進(jìn)行雙向通信。使用NI軟件無線電(SDRs)和LabVIEW系統(tǒng)設(shè)計平臺軟件,這種MIMO系統(tǒng)的模塊化特性促使系統(tǒng)從僅有幾個節(jié)點發(fā)展到了128天線的大規(guī)模MIMO系統(tǒng)。并且隨著無線研究的演進(jìn),基于硬件的靈活性,它也可以被重新部署到其他配置的應(yīng)用中,比如點對點網(wǎng)絡(luò)中的分布式節(jié)點,或多小區(qū)蜂窩網(wǎng)絡(luò)等。
圖1. 瑞典隆德大學(xué)——基于USRP RIO的大規(guī)模MIMO測試臺 (a) 一種自定義的橫向極化貼片天線陣列(b)。
瑞典隆德大學(xué)的Ove Edfors教授和Fredrik Tufvesson教授與NI一起合作,使用NI大規(guī)模MIMO應(yīng)用程序框架開發(fā)出了一套世界上最大規(guī)模的MIMO系統(tǒng)(見圖1)。他們的系統(tǒng)使用了50套USRP RIO軟件無線電來實現(xiàn)大規(guī)模MIMO基站收發(fā)信機(jī)天線數(shù)(見表1)為100天線的配置。基于軟件無線電的概念,NI和隆德大學(xué)研發(fā)團(tuán)隊開發(fā)了系統(tǒng)級的軟件和物理層,該物理層使用了類似于LTE的物理層和時分復(fù)用技術(shù)來實現(xiàn)移動端接入。在這一合作過程中所開發(fā)的軟件,可作為大規(guī)模MIMO應(yīng)用程序框架的一部分被下載。表1中展示了大規(guī)模MIMO應(yīng)用程序框架所支持的系統(tǒng)和協(xié)議參數(shù)。
大規(guī)模MIMO應(yīng)用程序框架系統(tǒng)參數(shù)
大規(guī)模MIMO系統(tǒng)架構(gòu)
正如其他通訊網(wǎng)絡(luò),大規(guī)模MIMO系統(tǒng)由基站收發(fā)信機(jī)(BTS)和用戶設(shè)備(UE)或者是移動用戶所組成。
大規(guī)模MIMO系統(tǒng)展望蜂窩網(wǎng)絡(luò)的應(yīng)用,其通常由基站收發(fā)信機(jī)(BTS)和用戶設(shè)備(UE)或移動用戶所構(gòu)成。然而,大規(guī)模MIMO徹底改變了以往需要配置大量的BTS天線以同時跟多個用戶設(shè)備進(jìn)行通訊的傳統(tǒng)拓?fù)浣Y(jié)構(gòu)。在NI和隆德大學(xué)合作開發(fā)的系統(tǒng)中,其BTS采用了每用戶設(shè)備10個基站天線單元的系統(tǒng)設(shè)計因數(shù),可同一時間提供10個用戶,對這個100天線基站進(jìn)行全帶寬訪問的能力。每用戶設(shè)備10個基站天線單元的這一系統(tǒng)設(shè)計因數(shù)已經(jīng)使得眾多理論成果得到被證實。
在一個大規(guī)模MIMO系統(tǒng)中,一組用戶設(shè)備同時發(fā)射一組正交導(dǎo)頻到基站收發(fā)信機(jī)(BTS)。而BTS所接收的上行鏈路導(dǎo)頻就可被用來估計信道矩陣。在下行鏈路時隙中,該信道估計即被用于計算下行鏈路信號的預(yù)編碼器。理想情況下,這就導(dǎo)致每一個移動用戶從無干擾的信道上收到所要傳達(dá)給他們的信息。預(yù)編碼器設(shè)計是一個開放的研究領(lǐng)域,且適用于各種各樣的系統(tǒng)設(shè)計目標(biāo)。舉個例子,預(yù)編碼器可用來設(shè)計盡可能地對其他用戶不產(chǎn)生干擾、最小化總輻射功率,或者是減少所發(fā)送射頻信號的峰值平均功率比。
大規(guī)模MIMO應(yīng)用程序框架可用于很多的配置應(yīng)用中,且可支持64到128天線高達(dá)20MHz瞬時實時帶寬,同時支持多個獨立用戶設(shè)備同時使用。這個類似LTE的協(xié)議使用2048個點的快速傅里葉變換計算(FFT)和0.5毫秒的時隙,如表1中所示。這0.5毫秒的時隙確保了足夠的信道一致性,促進(jìn)了移動測試場景中(換句話說,用戶設(shè)備是在運(yùn)動的)的信道互易性。
大規(guī)模MIMO硬件和軟件組成
設(shè)計一個大規(guī)模MIMO系統(tǒng)需要四個屬性:
靈活的軟件無線電,可用于接受和發(fā)送射頻信號
射頻設(shè)備之間精確的時間和頻率同步
具有高吞吐量和確定性的總線,用以傳輸和匯集海量的數(shù)據(jù)
高性能的處理能力,用以滿足物理層和介質(zhì)訪問控制(MAC)執(zhí)行時所需的實時性能需求
理想情況下,這些的屬性可被快速自定義以滿足更多更廣泛的研發(fā)需求。
基于NI平臺的大規(guī)模MIMO應(yīng)用程序框架將軟件無線電、時鐘分配模塊、高數(shù)據(jù)吞吐量PXI系統(tǒng)以及LabVIEW相結(jié)合,提供了一個具有魯棒性和確定性的研發(fā)所使用的原型設(shè)計平臺。這一部分就具體解釋了基于NI的大規(guī)模MIMO基站和用戶設(shè)備終端中所用到的各種硬件和軟件部分。
USRP軟件無線電
USRP RIO軟件無線電包含了一個2X2 MIMO集成收發(fā)儀和用于提高基帶處理速度的高性能Xilinx Kintex-7 FPGA,所有的這些硬件均封裝在一個0.5U的機(jī)架安裝式外殼內(nèi)。它將主機(jī)控制器通過PCI Express x4總線連接到系統(tǒng)控制器,為臺式電腦或者PXI Express主機(jī)提供高達(dá)800MB/s的數(shù)據(jù)傳輸速度(或是通過ExpressCard為筆記本電腦提供200MB/s的速度)。圖2提供了USRP RIO硬件的程序框圖概覽。
USRP RIO基于LabVIEW可重配置I/O (RIO)架構(gòu),結(jié)合了開放的LabVIEW系統(tǒng)設(shè)計軟件和高性能的硬件模塊,從而大大簡化了開發(fā)。高度的軟硬件集成降低了系統(tǒng)集成的難度,這對于如此規(guī)模的系統(tǒng)來說具有重要意義,使得研發(fā)人員可以集中更多的精力在研發(fā)上。盡管整個NI應(yīng)用程序框架軟件都是基于LabVIEW開發(fā)的,但LabVIEW可以集成 .m腳本文件、ANSI C/C++及HDL等其他編程設(shè)計語言的IP,通過代碼重用來提高開發(fā)效率。
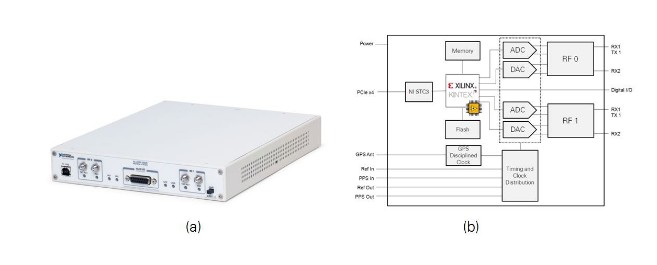
圖2. USRP RIO硬件(a) 以及系統(tǒng)框圖 (b)
PXI Express機(jī)箱背板
大規(guī)模MIMO應(yīng)用程序框架使用PXIe-1085機(jī)箱,這是一款高級的18槽PXI機(jī)箱,其使用的PCI Express第二代技術(shù)使得每一個插槽都可用于高吞吐量、低延遲性的應(yīng)用設(shè)計。該機(jī)箱擁有每插槽高達(dá)4 GB/s的專用帶寬,以及12 GB/s的系統(tǒng)帶寬。圖3所展示的是雙開關(guān)的背板架構(gòu)圖。多PXI機(jī)箱能通過菊花鏈或者星形鏈的配置方式擴(kuò)展搭建高通道數(shù)的系統(tǒng)。
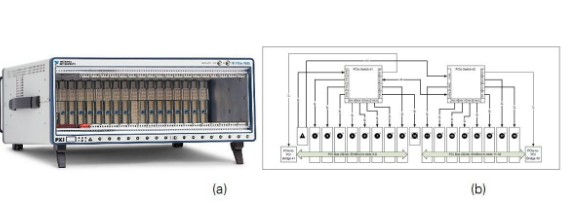
圖3. 18槽PXIe-1085機(jī)箱(a) 以及系統(tǒng)框圖 (b)
高性能可重配置FPGA處理模塊
大規(guī)模MIMO應(yīng)用程序框架使用了FlexRIO FPGA模塊來添加靈活的高性能的處理模塊,這些模塊是基于PXI形式,并可使用LabVIEW FPGA模塊進(jìn)行編程。PXIe-7976R FPGA模塊可以獨立使用,它提供了邏輯單元豐富且可定制的Xilinx Kintex-7 410T,通過PCI Express Gen 2 x8總線與PXI Express背板相連。此外利用高性能的射頻收發(fā)器、基帶模數(shù)轉(zhuǎn)換器 / 數(shù)模轉(zhuǎn)換器以及高速數(shù)字I/O,大部分插入式FlexRIO適配器模塊可進(jìn)一步擴(kuò)展該平臺的I/O功能。
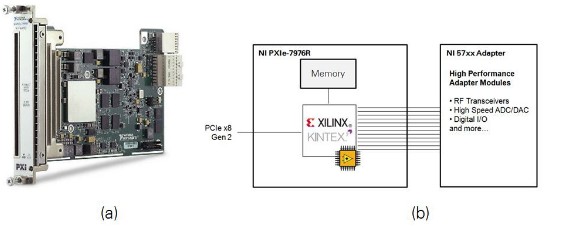
圖4. PXIe-7976R FlexRIO模塊(a) 以及系統(tǒng)框圖 (b)
8通道時鐘同步
Ettus Research公司的OctoClock 8通道時鐘分配模塊提供了對高達(dá)8套USRP設(shè)備時間和頻率的同步,通過在匹配長度信號中放大和分割一個外部10MHz參考時鐘和每秒脈沖數(shù)(PPS)信號的八種方法來實現(xiàn)同步。OctoClock-G使用內(nèi)部集成的GPS鎖定晶體振蕩器(GPSDO)作為內(nèi)部時間和頻率參考。圖4顯示的是OctoClock-G的系統(tǒng)概圖。前面板上的一個開關(guān)用來供用戶選擇使用內(nèi)部時鐘源還是外部參考時鐘。有了OctoClock模塊,用戶就可以簡單地搭建出MIMO系統(tǒng),并與其他可能涉及到MIMO研究的高通道數(shù)系統(tǒng)或一起協(xié)同工作。
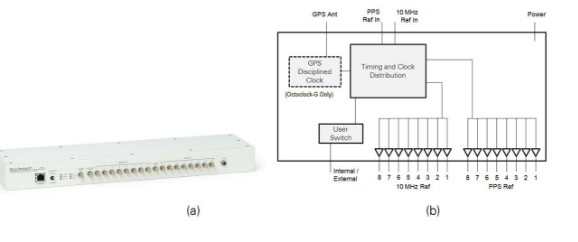
圖5. OctoClock-G模塊(a) 以及系統(tǒng)框圖 (b)
LabVIEW系統(tǒng)設(shè)計環(huán)境
LabVIEW提供了一個集成化的工具鏈,用以管理系統(tǒng)級軟硬件細(xì)節(jié);在圖形化用戶界面上可視化系統(tǒng)信息,開發(fā)通用處理器(GPP)、實時和FPGA代碼;以及將代碼部署到研發(fā)測試臺上。借助LabVIEW,用戶可以輕松集成其他編程環(huán)境中的代碼,比如ANSI C/C++可通過調(diào)用庫節(jié)點函數(shù)集成、VHDL可通過IP集成節(jié)點集成、甚至 .m文件腳本也可通過LabVIEW MathScript實時模塊進(jìn)行集成。這使得開發(fā)具有高度可讀性和可定制性的高性能設(shè)計變得可能。所有的硬件和軟件在同一個LabVIEW項目中進(jìn)行管理,使得研究人員能夠?qū)⒋a部署至所有處理單元并在統(tǒng)一的環(huán)境中運(yùn)行各種測試場景。大規(guī)模MIMO應(yīng)用程序框架采用LabVIEW進(jìn)行開發(fā)是因為LabVIEW提供的高效率及其基于LabVIEW FPGA模塊編程和控制I/O的能力。
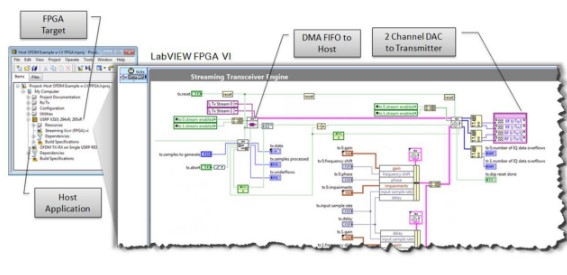
圖6. LabVIEW項目和LabVIEW FPGA應(yīng)用程序
大規(guī)模MIMO BTS應(yīng)用程序框架架構(gòu)
以上軟硬件平臺組件相結(jié)合即可構(gòu)成可從幾根天線擴(kuò)展到超過128根同步天線的測試臺。為了便于用戶理解,本技術(shù)白皮書僅說明了64、96以及128天線配置。128天線系統(tǒng)包含了64個雙通道USRP RIO設(shè)備,通過星形架構(gòu)連接到四個PXI機(jī)箱上。主機(jī)箱匯集數(shù)據(jù)后由FPGA和基于四核Intel i7處理器的PXI控制器進(jìn)行集中處理。
在圖7中,主機(jī)箱使用了PXIe-1085機(jī)箱作為主數(shù)據(jù)匯集節(jié)點和實時信號處理引擎。PXI機(jī)箱提供了17個插槽,預(yù)留給輸入輸出設(shè)備、定時和同步模塊、用于實時信號處理的FlexRIO FPGA模塊以及連接從機(jī)箱的擴(kuò)展模塊。128天線的大規(guī)模MIMO BTS系統(tǒng)需要非常高的數(shù)據(jù)吞吐量來匯集和實時處理128個通道發(fā)送和接收的I-Q正交信號,對此PXIe-1085機(jī)箱是最佳選擇,它支持吞吐量高達(dá)3.2GB/s的PCI Gen 2 x8數(shù)據(jù)鏈路。
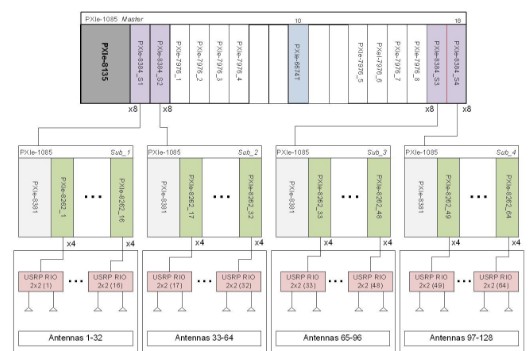
圖7. 基于PXI和USRP RIO的可擴(kuò)展大規(guī)模MIMO系統(tǒng)框圖
在主機(jī)箱第一槽位的PXIe-8135 實時控制器或嵌入式計算機(jī)擔(dān)任著中央系統(tǒng)控制器的角色。PXIe-8135 實時控制器具有2.3GHz四核i7-3610QE處理器(單核下最大可超頻提升到3.3GHz)。主機(jī)箱內(nèi)還包含4個PXIe-8384(S1到S4)接口模塊,用于將子機(jī)箱連接到主系統(tǒng)。主從機(jī)箱間通過MXI總線進(jìn)行連接,確切來說是PCI ExpressGen 2 x8總線,為主從節(jié)點之間提供了高達(dá)3.2GB/s的數(shù)據(jù)傳輸吞吐量。
系統(tǒng)還包括了8個PXIe-7976R FlexRIO FPGA模塊,用來滿足大規(guī)模MIMO系統(tǒng)中的實時信號處理需求。插槽的位置配置示例展示了主機(jī)箱中的FPGA可以通過級聯(lián)方式連接,以支持每一個子節(jié)點的數(shù)據(jù)處理需求。每個FlexRIO模塊可以通過背板以低于5μs的延遲和高達(dá)3GB/s的吞吐量與其他FlexRIO模塊或所有USRP RIO進(jìn)行數(shù)據(jù)通信。進(jìn)行接收或發(fā)送數(shù)據(jù),并且延時小于且吞吐量。
定時和同步
定時和同步對于任何一個需要部署大量無線電設(shè)備的系統(tǒng)來說都是至關(guān)重要的,對于大規(guī)模MIMO系統(tǒng)來說也是如此。BTS系統(tǒng)共享一個通用10MHz參考時鐘和一個數(shù)字觸發(fā)信號,用于啟動每個無線電設(shè)備的數(shù)據(jù)采集和生成,以確保整個系統(tǒng)之間的系統(tǒng)級同步(參見圖8)。PXIe-6674T定時和同步模塊具有一個恒溫晶體振蕩器(OCXO),位于主機(jī)箱的第10槽,可生成一個非常穩(wěn)定且精確的10MHz參考時鐘(50 ppb的精確度)并提供一個數(shù)字觸發(fā)信號來實現(xiàn)與OctoClock-G時鐘分配模塊的同步。之后,OctoClock-G提供并緩存這一個10MHz參考時鐘信號(MCLK)和觸發(fā)信號(MTrig)到OctoClock模塊,以一對八的比例提供給USRP RIO設(shè)備,從而確保所有天線共享10MHz的參考時鐘和主觸發(fā)信號。這里提到的控制架構(gòu)可精確地控制每一個無線電設(shè)備 /天線單元。
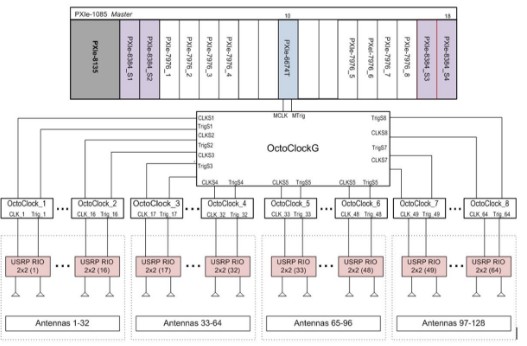
圖8. 大規(guī)模MIMO系統(tǒng)時鐘分配框圖
表2提供了64、96和128天線系統(tǒng)的基站配件清單快速參考。它包括了如圖1中所示的硬件設(shè)備和設(shè)備連接線纜。
規(guī)模MIMO基站配件清單
基站收發(fā)信機(jī)(BTS)軟件架構(gòu)
基站應(yīng)用程序框架軟件是根據(jù)表1中所列的系統(tǒng)參數(shù)目標(biāo)而設(shè)計的,其中USRP RIO中的FPGA負(fù)責(zé)物理層的正交頻分復(fù)用(OFDM)處理, PXI主機(jī)箱中的FPGA負(fù)責(zé)MIMO物理層處理。更高層的介質(zhì)訪問控制函數(shù)則在PXI控制器上的英特爾通用處理器(GPP)中運(yùn)行。該系統(tǒng)架構(gòu)可允許進(jìn)行大量的數(shù)據(jù)處理且具有足夠低的延時性來維持信道互易性。預(yù)編碼的參數(shù)直接從接收機(jī)傳輸?shù)桨l(fā)射機(jī),以獲得最高的系統(tǒng)性能。
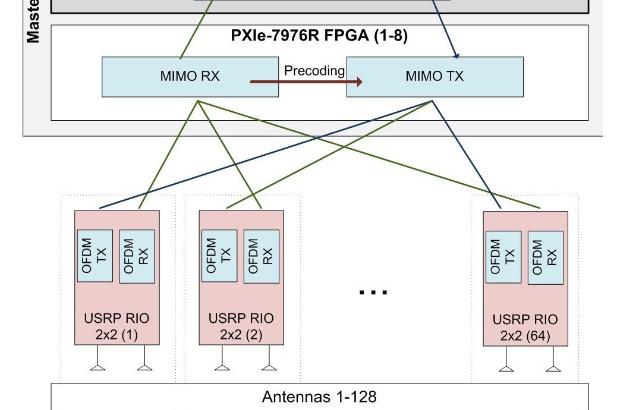
圖9. 大規(guī)模MIMO系統(tǒng)數(shù)據(jù)和處理框圖
從天線開始,OFDM物理層的處理在FPGA中實現(xiàn),這樣計算強(qiáng)度最大的處理就可在天線附近執(zhí)行。之后,計算結(jié)果與MIMO接收機(jī)(MIMO RX)的IP函數(shù)相結(jié)合,從而得到每個用戶和每個副載波的信道信息。然后再將計算得到的信道參數(shù)傳輸?shù)組IMO發(fā)射端(MIMO TX)進(jìn)行預(yù)編譯,將能量集中到單一用戶的回路中。雖然介質(zhì)訪問控制的某些部分是在FPGA中實現(xiàn),但是其大部分的實現(xiàn)還有其他更高層的一些處理還是在通用處理器(GPP)中實現(xiàn)的。系統(tǒng)每個階段使用的特定算法是當(dāng)前一個活躍的研究領(lǐng)域。整個系統(tǒng)可使用LabVIEW和LabVIEW FPGA進(jìn)行重新配置——在提升速度的同時無需犧牲程序的可讀性。
用戶設(shè)備
每一個用戶設(shè)備代表一臺手機(jī)或者是其他單入單出(SISO)或具有2x2 MIMO無線功能的無線設(shè)備。用戶設(shè)備(UE)的原型實驗使用了具有集成式GPSDO的USRP RIO,并通過一根PCI Express轉(zhuǎn)ExpressCard線纜連接到一臺筆記本電腦。GPSDO的重要性在于它提供了更高的頻率精確性,而且如果將來進(jìn)行系統(tǒng)擴(kuò)展有需要時,也可提供同步和獲取地理位置的能力。一個典型的測試臺實現(xiàn)會通常包含多個用戶設(shè)備的系統(tǒng),其中每一臺USRP RIO可相當(dāng)于一臺或兩臺用戶設(shè)備。在用戶設(shè)備上部署的軟件與BTS的軟件非常相似,然而它只是作為一個單天線系統(tǒng)實現(xiàn),所以將它的物理層放在USRP RIO中的FPGA上實現(xiàn),而把介質(zhì)訪問控制層(MAC)放在主機(jī)PC上實現(xiàn)。
使用筆記本電腦和USRP RIO進(jìn)行典型的用戶設(shè)備搭建
表3提供了在一個單用戶設(shè)備系統(tǒng)中使用的配件清單。它包含了圖10中所示的硬件設(shè)備和連接線纜。或者,如果選擇臺式電腦作為用戶設(shè)備控制器時,可以使用PCI Express連接。
用戶設(shè)備配件清單
結(jié)論
NI技術(shù)通過LabVIEW系統(tǒng)設(shè)計軟件以及USRP RIO和PXI平臺的組合正在徹底改革高端科研系統(tǒng)的原型設(shè)計方法。本文章介紹了一種搭建大規(guī)模多入多出(MIMO)系統(tǒng)的可行方法來進(jìn)一步推進(jìn)5G的研究。該應(yīng)用程序框架中使用的各種NI技術(shù)的獨特組合實現(xiàn)了大量無線電設(shè)備在時間和頻率上的同步,而且PCI Express技術(shù)也提供了以15.7GB/s速率上下行傳輸和匯集I-Q信號所需的吞吐量。FPGA的數(shù)據(jù)流設(shè)計方式簡化了物理層和介質(zhì)訪問控制層上的高性能處理,滿足實時處理的要求。
為保證這些產(chǎn)品能滿足無線技術(shù)研究人員的特定需求,NI正在積極地與行業(yè)領(lǐng)先的研發(fā)人員和隆德大學(xué)等世界名校進(jìn)行合作。這些合作推動了一些研究領(lǐng)域取得令人興奮的進(jìn)展,同時也促進(jìn)了需要和正在使用大規(guī)模MIMO應(yīng)用程序框架等工具的工程師和科研人員之間的方法、IP和最佳實踐共享。
責(zé)任編輯:pj
-
控制器
+關(guān)注
關(guān)注
114文章
17066瀏覽量
183705 -
嵌入式
+關(guān)注
關(guān)注
5147文章
19616瀏覽量
316462 -
振蕩器
+關(guān)注
關(guān)注
28文章
3987瀏覽量
140688
發(fā)布評論請先 登錄


工程機(jī)械控制器廠家 控制器國產(chǎn)替代 #國產(chǎn)控制器#控制器廠家#控制器品牌

Y1620工程機(jī)械主機(jī)控制器 車載智能控制器 CAN總線 #工程機(jī)械控制器 #整車控制器 #車載控制器
通信控制器驅(qū)動干嘛的,通信控制器驅(qū)動有必要升級嗎

LabVIEW運(yùn)動控制(一):EtherCAT運(yùn)動控制器的SCARA機(jī)械手應(yīng)用 #正運(yùn)動技術(shù) #運(yùn)動控制器
什么是MPU控制器及其應(yīng)用
低功耗實時喚醒式無線灌溉控制器:智慧農(nóng)業(yè)灌溉新風(fēng)向
使用功率控制器件的汽車防抱死制動系統(tǒng)控制


國產(chǎn)控制器廠家 整車控制器 以太網(wǎng)控制器 CAN控制器 國產(chǎn)化替代

車載智能控制器 工程機(jī)械控制器 CAN總線控制器 碩博電子 #控制器 #can總線 #國產(chǎn)化替代
微控制器內(nèi)部的存儲器有哪些
NS486SXF高度集成的嵌入式系統(tǒng)控制器數(shù)據(jù)表
LM10000 AVS系統(tǒng)控制器數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論