 聲波作用下MEMS加速度計失效機制研究
聲波作用下MEMS加速度計失效機制研究
摘要:諧振頻率范圍內的聲波對微機電系統傳感器的共振干擾是一種潛在的安全威脅,可導致MEMS加速度計信號路徑中放大器失效。文章提出了放大器雙邊非對稱截止失效的理論,仿真分析了線性掃頻和掃幅聲波信號對MEMS加速度計輸出特性的干擾,并進行線性掃頻聲波和掃幅聲波干擾ADXL103的實驗以驗證理論的正確性,實驗結果表明聲波干擾導致的最大加速度偏移量為4.8 m/s2。最后提出了軟件迭代算法防御方案,仿真結果表明補償后的最大加速度干擾偏移量低至0.08 m/s2。
0引言
傳感器是工業4.0時代的核心器件,物聯網的發展和智能終端的廣泛應用進一步推動了微機電系統(Micro-Electro-Mechanical System,MEMS)傳感器的發展。MEMS慣性傳感器主要由MEMS陀螺儀和MEMS加速度計組成,MEMS加速度計可應用于軍事國防、航空航天、汽車工業、醫療健康、消費電子等場景。然而在許多應用場景中,存在大功率諧振頻率范圍內的聲波會對MEMS加速度計的輸出造成負面影響,限制了MEMS加速度計應用領域的進一步拓展。作為一門新興的研究課題,聲波作用于MEMS加速度計的干擾與防御技術在近兩年引起了人們的高度關注。
2017年,密歇根大學的Timothy Trippel等人首次提出諧振頻率范圍內的聲波對MEMS加速度計輸出性能產生影響。文章詳細介紹了聲波干擾電容式MEMS加速度計的工作原理,創新性地提出造成MEMS加速度計失效的硬件部分是信號電路中的放大器和低通濾波器,并進行了一系列聲波干擾實驗。提出了改善低通濾波器和放大器硬件結構以抵御聲波干擾,進一步提出改變模數轉換器的采樣速率抵御低通濾波器失效的軟件防御方案,同時進行了防御方案有效性的驗證實驗。
2017年,阿里巴巴安全科研小組在黑帽安全技術大會上展示聲波破壞性干擾MEMS慣性器件,導致系統停止工作的實驗成果。實驗演示了諧振頻率附近的聲波對智能手機、平衡車、米兔機器人、全息眼鏡、無人機等設備中的MEMS慣性器件產生影響。2019年,武漢大學的科研團隊通過實驗和ANSYS多物理場仿真驗證聲波干擾對MPU6050中MEMS加速度計的影響。文章中詳細敘述了聲波頻率、聲壓、聲源方向對MEMS加速度計輸出的影響。現有的聲波防御方案提出了在傳感器周圍添加隔聲泡沫,使用新型聲學阻尼材料以及使用多傳感器融合等措施來防御諧振頻率范圍內的聲波干擾。對于聲波干擾MEMS加速度計的研究缺少系統的理論分析和定量研究; 對于現有的防御聲波干擾方案,一方面增加了傳感器的體積和成本,另一方面消除聲波干擾的效果并不明顯,高效的防御方案有待提出。
本文確定了聲波干擾導致放大器雙邊非對稱截止失效的理論輸出公式,線性掃頻聲波和掃幅聲波干擾實驗和仿真結果具有一致性。進一步提出軟件迭代算法補償放大器失效,通過仿真結果證明了該防御方法的有效性。
1放大器失效的理論分析與仿真結果
當電容式MEMS加速度計受到外界聲波作用時,若聲波頻率等于MEMS加速度計的諧振頻率,將會發生機械共振。聲波力作用于MEMS加速度計的可動質量塊,可動質量塊敏感外界加速度的變化,產生偏離原平衡位置的相對運動。可動電極與固定電極之間的電容量發生改變,通過特殊設計的外圍電路檢測這種非平衡態并轉換為電信號輸出,電容—電壓轉換電路將電容改變量轉換為電壓信號。電壓信號經過放大器放大,再經過低通濾波器濾除高頻噪聲,最終經過模數轉換器將模擬信號輸出轉換為數字信號輸出,最后的輸出量正比于待測加速度。聲波信號作用于MEMS加速度計傳感器的信號演變路徑如圖1所示,其基本結構包含了機械結構和信號處理電路。理想情形下,放大器的動態范圍可以放大來自前級電路中的任何電壓信號。實際情形中,信號路徑中放大器的動態范圍是有限的。當諧振頻率范圍內的聲波作用于可動質量塊時,如果產生的電壓信號超過放大器的動態范圍,將會出現放大器的截止失效,輸出結果中出現低頻直流分量,低通濾波器無法濾除該影響,最終導致MEMS加速度計測量輸出的結果不準確。由于加速度計本身存在重力加速度靜態偏置,若諧振頻率范圍內的聲波導致MEMS加速度計放大器將出現非對稱截止失真,導致最終輸出呈現非線性的特征。
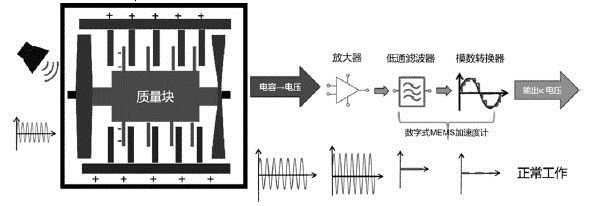
圖1 聲波作用于MEMS加速計的信號演變路徑
1.1理論分析
首先考慮放大器單邊截止失效情形,放大器截止失效的上限閾值對應的驅動電壓設為a,當振幅為A的正弦聲波經過放大器,由于共振效應的影響,出現放大器單邊截止失效,此過程的基本示意圖如圖2( a)所示。正弦聲波在一個周期內的平均輸出結果可以表示為:

由于聲波信號的振幅正比于聲波驅動電壓信號,將公式( 1)中的聲波振幅A換為聲波驅動電壓信號U,當放大器單邊截止失效時,MEMS加速度的改變量Δa隨聲波驅動電壓信號U變化的關系式為:

考慮雙邊非對稱截止失效的情形,放大器截止失效的上限閾值對應的驅動電壓設為a,放大器截止失效的下限閾值對應的驅動電壓設為b。當振幅為A的正弦聲波經過放大器,由于共振效應的影響,出現雙邊截止失效的情形,其基本示意圖如圖2(b)所示。同理可得,放大器雙邊非對稱截止失效后正弦聲波在一個周期內的平均輸出結果。將聲波振幅A換為聲波驅動電壓信號U,可以得到MEMS加速度的改變量Δa隨聲波驅動電壓信號U變化的關系式:
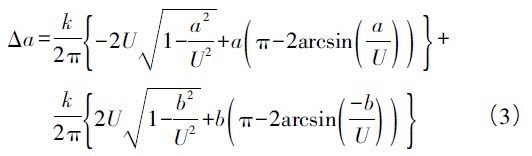
表1 公式(3)中字母所表示的物理含義
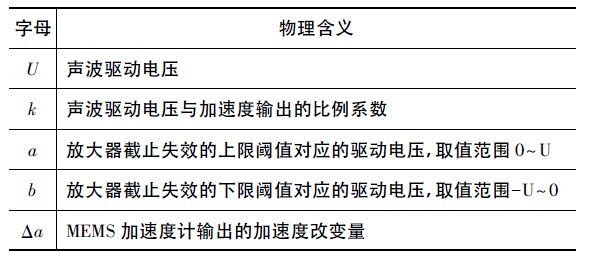
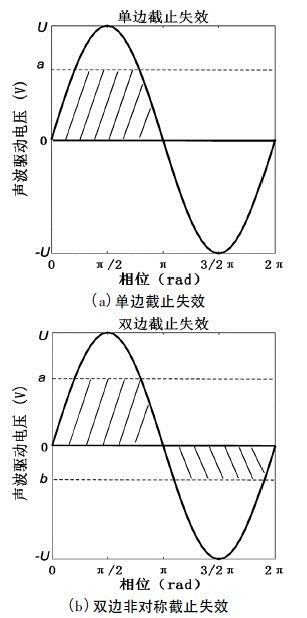
圖2 放大器截止失效示意圖
1.2仿真結果
為了進一步驗證上述理論公式的正確性以及放大器特征參數對MEMS加速度計輸出的加速度改變量的影響,首先考慮放大器單邊截止失效情形,確定放大器截止失效的上限閾值對應的驅動電壓a值的影響。a值范圍從2等差增加到10,增量為2。最終得到不同a值情形下,加速度改變量Δa隨聲波驅動電壓U變化的圖像,U的取值范圍從0增加至24 V,其仿真結果如圖3所示。
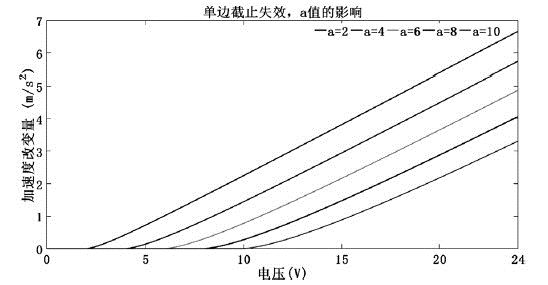
圖3 放大器單邊截止失效,不同a值,加速度改變量隨聲波驅動電壓變化
由圖3的結果可知,a值的大小決定了聲波干擾出現影響的位置。當a值為4時,進一步考慮放大器雙邊非對稱截止失效情形,b值的范圍從-13.8等量增加至-5.8,增量為2。最終得到不同b值情形下,加速度改變量Δa隨聲波驅動電壓U變化的圖像,U的取值范圍從0增加至24 V,其結果如圖4所示。
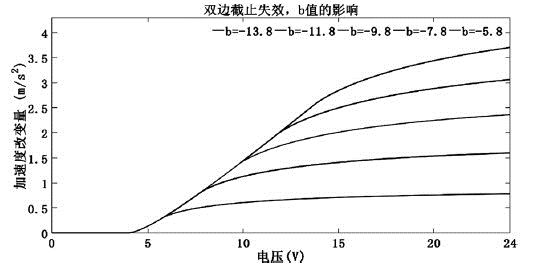
圖4 放大器雙邊非對稱截止失效,當a = 4時,不同b值,加速度改變量隨聲波驅動電壓的變化
由圖4的結果可知,b值大小決定了MEMS加速度計受聲波干擾的響應程度以及聲波干擾持續的時間長短。b的絕對值越大,加速度改變量越大,聲波干擾持續的時間越長。
2聲波干擾ADXL103實驗
2.1實驗裝置
聲波干擾的實驗測試平臺如圖5所示。函數信號發生器(Agilent 33250A)可以產生不同振幅、不同頻率的聲波信號,使用一個轉換器將信號發生器輸出的電信號傳遞到功率放大器(AE TECHRON 7224)的輸入端。經過功率放大器放大的電信號輸出至喇叭,進一步轉換為聲音信號。一大一小喇叭經分頻器驅動,其區別在于輸出的聲音頻率范圍不同。使用示波器(RIGOL DS1102E)觀察信號發生器的輸入波形和功率放大器的輸出波形,可以進一步確定功率放大器的放大倍數。使用聲壓計(HT-850A)測量實驗聲場中的聲壓級。MEMS加速度計的輸出信號通過USART在筆記本電腦上由相應的軟件直接讀取加速度數值。為了隔離外界干擾聲源,我們將MEMS加速度計和喇叭封裝在亞克力箱內。典型的電容式MEMS加速度計產品是ADI公司的單軸MEMS加速度計——ADXL103,它利用梳齒式差分電容檢測,利用表面微機械加工工藝制作多晶硅差動電容結構,體積小,可以與集成電路工藝相兼容。同時,ADXL103是模擬式MEMS加速度計,可根據不同的應用場景選調測量范圍,在工業領域上有廣泛應用。
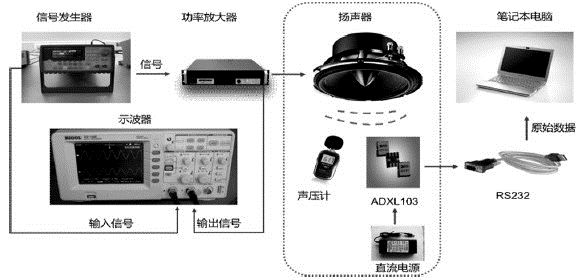
圖5 聲波干擾實驗測試平臺示意圖
2.2線性掃幅聲波干擾實驗結果
為了驗證聲波干擾導致放大器雙邊非對稱截止失效理論的正確性,首先進行線性掃幅聲波干擾實驗。線性掃幅聲波干擾ADXL103的實驗基本設置:聲波信號的振幅隨時間線性增加,設置函數信號發生器輸入的正弦電壓信號峰峰值由0線性增加到3 V,對正弦聲波進行振幅調制,線性增加的載波信號周期為20 s。正弦聲波的頻率為諧振頻率范圍內的點頻,實驗中設置信號發生器連續輸出兩個周期的線性掃幅信號。功率放大器的放大倍數為8倍,聲壓級水平為110 dB,揚聲器與ADXL103之間的垂直距離為10 ~ 11 cm。ADXL103處于靜止狀態,其靜態偏置為9.80 m/s2。線性掃幅聲波干擾ADXL103的時域響應實驗結果如圖6所示。
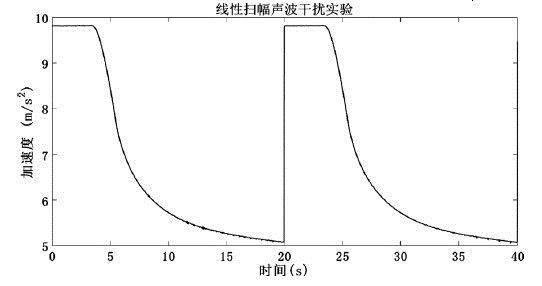
圖6 線性掃幅聲波干擾ADXL103的時域響應
由圖6可知,放大器非對稱截止失效導致ADXL103的輸出結果具有非線性的特征。線性掃幅聲波導致MEMS加速度計的輸出由9.80 m/s2變為5.00 m/s2,加速度的改變量為4.80 m/s2。
為了進一步驗證上述理論公式的正確性,將理論公式與實驗結果進行曲線擬合。利用一個周期的線性掃幅聲波干擾ADXL103的實驗數據,MEMS加速度計原有的靜態偏置9.80 m/s2減去原始實驗輸出的加速度,縱坐標表示聲波干擾導致加速度的改變量,橫坐標為聲波驅動電壓。將實驗結果與理論公式進行曲線擬合,其結果如圖7所示。
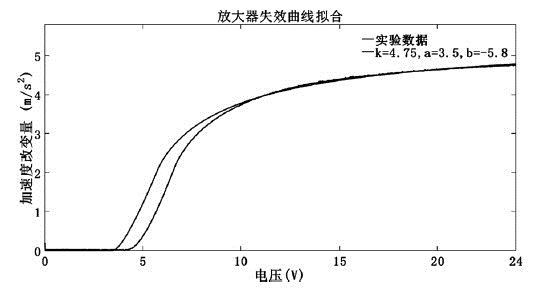
圖7 放大器非對稱截止失效,實驗數據與仿真結果的曲線擬合
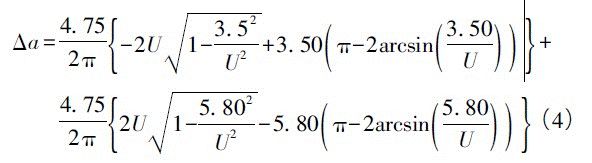
由圖7可知,與實驗結果相比,仿真結果出現截止失效的位置提前了,其原因是由于仿真結果中對于放大器截止失效的情形過于理想化。在實際情形中,放大器出現截止失效后的飽和加速度輸出存在過渡時間,所以仿真結果出現變化的位置提前了。通過曲線擬合結果,最終確定當a值為3.50,b 值為-5.80,k值為4.75時,線性掃幅聲波干擾的實驗結果與放大器非對稱截止失效輸出的理論公式曲線擬合效果最好,加速度改變量隨聲波驅動電壓信號變化的函數關系式可以表示為:
2.3掃頻聲波干擾結果
接下來進行掃頻聲波干擾MEMS加速度計的仿真與實驗,進一步驗證放大器非對稱截止失效理論的正確性。運用MATLAB工具仿真掃頻聲波干擾MEMS加速度計導致放大器非對稱截止失效的輸出結果,接著進行掃頻聲波干擾ADXL103的實驗。實驗的基本設置如下:ADXL103處于靜止狀態,其靜態偏置為9.80 m/s2,信號發生器輸入的電壓信號峰值為3 V,經功率放大器放大為21 V,掃頻聲波的頻率范圍為4 ~ 6 kHz,掃描時間為300 s,聲壓級為108 dB,聲源和MEMS加速計的垂直距離為10 ~ 11 cm,上位機軟件的采樣頻率為100 Hz。掃頻聲波干擾ADXL103的實驗數據如圖8所示。
由圖8中的實驗數據(藍色線)可知,諧振頻率范圍內聲波干擾導致ADXL103的輸出偏離靜止狀態下的正常輸出;由圖8中的仿真數據(紅色線)可知,掃頻聲波干擾導致MEMS加速度計信號路徑中的放大器非對稱截止輸出,MEMS加速度計最終的輸出結果與實驗結果趨于一致。由于實際情形中放大器截止飽和輸出具有過渡時間,實驗結果中出現的截止位置與仿真結果的不同步,這與2.2節的討論結果是一致的。綜上所述,諧振頻率范圍內的聲波導致放大器非對稱截止失效,最終導致ADXL103的輸出結果不準確。
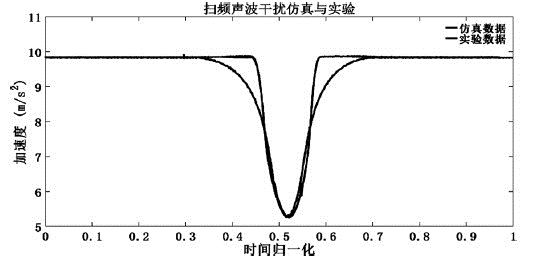
圖8 掃頻聲波干擾的仿真結果與實驗結果
3防御聲波干擾方案
針對諧振頻率范圍附近聲波導致MEMS加速度計放大器失效,我們提出采用軟件迭代算法補償的防御方案。設諧振頻率范圍內的正弦聲波干擾MEMS加速度計,首先需要獲得經過低通濾波器之前的MEMS加速度計放大器失效輸出的原始數據,求解整個范圍內數據的平均值為y,若出現放大器單邊截止失效,聲波信號輸出為單邊截止情形,y將偏離實際聲波信號的均值Y。其次,選取Δy范圍內的數據,計算該范圍內的平均值為y'。若誤差 ,則進行迭代,迭代公式可表示為:
,則進行迭代,迭代公式可表示為:

α為比例系數,ε為誤差截止范圍。當y和y'之間的誤差足夠小時,迭代終止。此時,y無限接近于真實均值Y,我們可以進一步將截止的聲波信號進行算法補償,得到真實的聲波信號。軟件迭代算法基本思想如圖9所示。
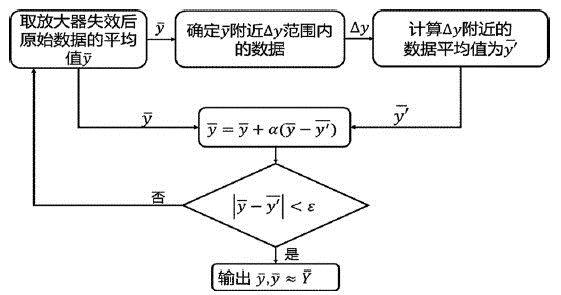
圖9 軟件迭代算法的基本思想
為了驗證軟件迭代算法的有效性,我們首先假設一個經過放大器非對稱截止失效且未通過低通濾波器濾波的原始正弦加速度信號,其靜態偏置為9.80 m/s2。經過計算,其輸出的均值為5.00 m/s2,即y的初始值為5.00 m/s2。用上述提出的軟件迭代算法進行補償,比例系數α設置為1.20,誤差截止范圍ε設為5 × 10-7,Δy的值為1.80。軟件迭代算法仿真的輸出結果如圖10所示,圖中顯示了算法補償后加速度改變量的變化(藍色線)以及在實驗中聲波干擾導致的加速度改變量(紅色線)。在經過數次迭代后,加速度改變量由4.80 m/s2變為最終的輸出結果為0.08 m/s2,仿真結果表明軟件迭代算法是可以有效補償MEMS加速度計由于放大器非對稱截止失效的不正常輸出。由于該防御方案需要獲得過采樣的原始數據,實驗室的設備裝置有限,實驗驗證有待進一步進行。
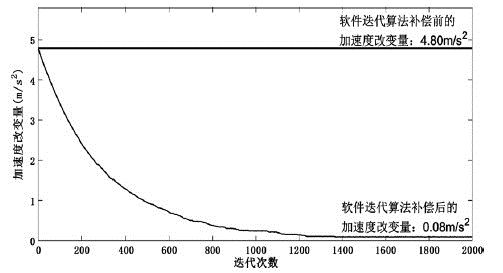
圖10 軟件迭代算法補償前后輸出的加速度改變量
4結語
通過理論分析、仿真結果和實驗驗證,最終得到了聲波干擾MEMS加速度計導致放大器失效的完整的理論機制。通過掃頻干擾ADXL103的實驗,可以得出聲波干擾導致MEMS加速度計的放大器非對稱截止失真的理論。進一步推導放大器失效的理論輸出表達式,確定放大器特征參數對MEMS加速度計輸出結果的影響,進行線性掃幅聲波干擾ADXL103的實驗數據與推導的理論公式輸出的曲線擬合,當放大器的特征參數a值為3.50,b值為-5.80,k值為4.75時,曲線擬合效果最好。提出軟件迭代算法以補償放大器失效造成的誤差輸出,仿真結果表明軟件迭代算法可將加速度改變量初始值4.80 m/s2補償至0.08 m/s2,將加速度輸出由5.00 m/s2補償至9.72 m/s2,接近于MEMS加速度計的靜態輸出9.80 m/s2,仿真結果表明了軟件迭代算法的有效性。提出聲波干擾導致放大器雙邊非對稱截止失效的理論機制和研究高效的防御聲波干擾方案具有重要的理論意義和實踐意義。
-
傳感器
+關注
關注
2564文章
52624瀏覽量
763943 -
放大器
+關注
關注
145文章
14104瀏覽量
216311 -
微機電系統
+關注
關注
2文章
136瀏覽量
24148
原文標題:聲波作用下MEMS加速度計失效機制研究
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
意法半導體推出工業級MEMS加速度計IIS2DULPX
高性能石英加速度計,滿足最嚴苛應用需求
十軸姿態傳感器模塊 | 集成加速度計、陀螺儀、磁力計,自帶BLE5.0藍牙

ADS1258 AVSS 5ms內電壓跳變后,讀取加速度計的值變為原來的一半是為什么?
MEMS加速度計的工作原理是什么
PCB Piezotronics推出357A67型三軸電荷輸出加速度計

EPSON工業級加速度計選型

e2studio開發三軸加速度計LIS2DW12(4)----測量傾斜度

e2studio開發三軸加速度計LIS2DW12(3)----檢測活動和靜止狀態
e2studio開發三軸加速度計LIS2DW12(2)----基于中斷信號獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據
用于安全和安保的Epson加速度計






 工商網監
工商網監
評論