") 使用單片機(jī)控制步進(jìn)電機(jī)的資料和代碼詳細(xì)說明
使用單片機(jī)控制步進(jìn)電機(jī)的資料和代碼詳細(xì)說明
步進(jìn)電機(jī)是機(jī)電控制中一種常用的執(zhí)行機(jī)構(gòu),它的用途是將電脈沖轉(zhuǎn)化為角位移,通俗地說:當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(及步進(jìn)角)。通過控制脈沖個數(shù)即可以控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
T89C2051單片機(jī)驅(qū)動步進(jìn)電機(jī)的電路和源碼
程序
stepper.c
stepper.hex
/*
* STEPPER.C
* sweeping stepper‘’s rotor cw and cww 400 steps
* Copyright (c) 1999 by W.Sirichote
*/
#include c:mc518051io.h /* include i/o header file */
#include c:mc518051reg.h
register unsigned char j,flag1,temp;
register unsigned int cw_n,ccw_n;
unsigned char step[8]={0x80,0xc0,0x40,0x60,0x20,0x30,0x10,0x90}
#define n 400
/* flag1 mask byte
0x01 run cw()
0x02 run ccw()
*/
main()
{
flag1=0;
serinit(9600);
dISAble(); /* no need timer interrupt */
cw_n = n; /* initial step number for cw */
flag1 |=0x01; /* initial enable cw() */
while(1){
{
tick_wait(); /* wait for 10ms elapsed */
energize(); /* round-robin execution the following tasks every 10ms */
cw();
ccw();
}
}
}
cw(){
if((flag1&0x01)!=0)
{
cw_n--; /* decrement cw step number */
if (cw_n !=0)
j++; /* if not zero increment index j */
else
{flag1&=~0x01; /* dISAble cw() execution */
ccw_n = n; /* reload step number to ccw counter */
flag1 |=0x02; /* enable cww() execution */
}
}
}
ccw(){
if((flag1&0x02)!=0)
{
ccw_n--; /* decremnent ccw step number */
if (ccw_n !=0)
j--; /* if not zero decrement index j */
else
{flag1&=~0x02; /* dISAble ccw() execution */
cw_n = n; /* reload step number to cw counter */
flag1 |=0x01; /* enable cw() execution */
}
}
}
tick_wait(){ /* cputick was replaced by simpler ASM code 10ms wait */
asm“ JNB TCON.5,*”; /* wait for TF0 set */
asm“ CLR TCON.5”; /* clear TF0 for further set */
asm“ ORL TH0,#$DC”; /* reload TH0 with $DC, TL0 = 0 */
}
energize(){
P1 = step[(j&0x07)]; /* only step 0-7 needed */
}
一、步進(jìn)電機(jī)常識
常見的步進(jìn)電機(jī)分三種:永磁式(PM),反應(yīng)式(VR)和混合式(HB),永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度 或15度;反應(yīng)式步進(jìn)一般為三相,可實現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動都很大。在歐美等發(fā)達(dá)國家80年代已被淘汰;混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點。它又分為兩相和五相:兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為 0.72度。這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。
二、永磁式步進(jìn)電機(jī)的控制
下面以電子愛好者業(yè)余制作中常用的永磁式步進(jìn)電機(jī)為例,來介紹如何用單片機(jī)控制步進(jìn)電機(jī)。
圖1是35BY型永磁步進(jìn)電機(jī)的外形圖,圖2是該電機(jī)的接線圖,從圖中可以看出,電機(jī)共有四組線圈,四組線圈的一個端點連在一起引出,這樣一共有5根引出線。要使用步進(jìn)電機(jī)轉(zhuǎn)動,只要輪流給各引出端通電即可。將COM端標(biāo)識為C,只要AC、 C、BC、 C,輪流加電就能驅(qū)動步進(jìn)電機(jī)運轉(zhuǎn),加電的方式可以有多種,如果將COM端接正電源,那么只要用開關(guān)元件(如三極管),將A、 、B、 輪流接地。
下表列出了該電機(jī)的一些典型參數(shù):
表135BY48S03型步機(jī)電機(jī)參數(shù)
型號 步距角 相數(shù) 電壓 電流 電阻 最大靜轉(zhuǎn)距 定位轉(zhuǎn)距 轉(zhuǎn)動慣量
35BY48S03 7.5 4 12 0.26 47 180 65 2.5
有了這些參數(shù),不難設(shè)計出控制電路,因其工作電壓為12V,最大電流為0.26A,因此用一塊開路輸出達(dá)林頓驅(qū)動器(ULN2003)來作為驅(qū)動,通過 P1.4~P1.7來控制各線圈的接通與切斷,電路如圖3所示。開機(jī)時,P1.4~P1.7均為高電平,依次將P1.4~P1.7切換為低電平即可驅(qū)動步進(jìn)電機(jī)運行,注意在切換之前將前一個輸出引腳變?yōu)楦唠娖健H绻淖冸姍C(jī)的轉(zhuǎn)動速度只要改變兩次接通之間的時間,而要改變電機(jī)的轉(zhuǎn)動方向,只要改變各線圈接通的順序。
圖135BY48S03型步進(jìn)電機(jī)外形圖
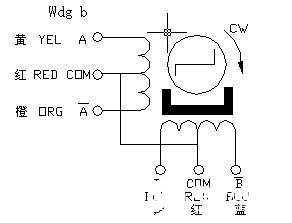
圖235BY48S03型步進(jìn)電機(jī)的接線圖
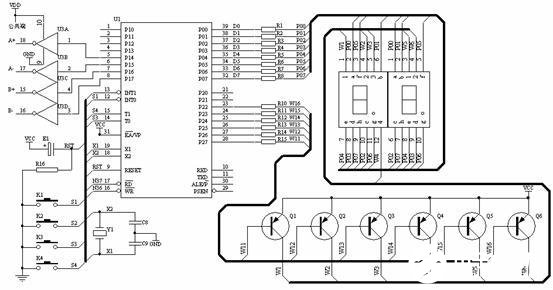
圖3單片機(jī)控制35BY48S03型步進(jìn)電機(jī)的電路原理圖
三、步進(jìn)電機(jī)的驅(qū)動實例
要求:控制電路如圖3所示,開機(jī)后,電機(jī)不轉(zhuǎn),按下啟動鍵,電機(jī)旋轉(zhuǎn),速度為25轉(zhuǎn)/分,按下加1鍵,速度增加,按下減1鍵,速度降低,最高速度為100轉(zhuǎn)/分,最低轉(zhuǎn)帶為25轉(zhuǎn)/分,按下停止鍵,電機(jī)停轉(zhuǎn)。速度值要求在數(shù)碼管上顯示出來。
1.要求分析
按上面的分析,改變轉(zhuǎn)速,只要改變P1.0~P1.3輪流變低電平的時間即可達(dá)到要求,這個時間不應(yīng)采用延時來實現(xiàn),因為會影響到其他功能的實現(xiàn)。這里以定時的方式來實現(xiàn)。下面首先計算一下定時時間。
按要求,最低轉(zhuǎn)速為25轉(zhuǎn)/分,而上述步進(jìn)電機(jī)的步距角為7.5,即每48個脈沖為1周,即在最低轉(zhuǎn)速時,要求為1200脈沖/分,相當(dāng)于50ms/脈沖。而在最高轉(zhuǎn)速時,要求為100轉(zhuǎn)/分,即48000脈沖/分,相當(dāng)于12.5ms/脈沖。可以列出下表
表1步進(jìn)電機(jī)轉(zhuǎn)速與定時器定時常數(shù)關(guān)系
速度 單步時間(us) TH1 TL1 實際定時(us)
25 50000 76 0 49996.8
26 48077 82 236 48074.18
27 46296 89 86 46292.61
28 44643 95 73 44640.155
… … … … …
100 12500 211 0 12499.2
表中不僅計算出了TH1和TL1,而且還計算出了在這個定時常數(shù)下,真實的定時時間,可以根據(jù)這個計算值來估算真實速度與理論速度的誤差值。
表中TH1和TL1是根據(jù)定時時間算出來的定時初值,這里用到的晶振是11.0592M。有了上述表格,程序就不難實現(xiàn)了,使用定時/計數(shù)器T1為定時器,定時時間到后切換輸出腳即可。
2.程序?qū)崿F(xiàn)
定義DSB-1A實驗板的S1為啟動鍵,S2為停止鍵,S3為加1鍵,S4為減1鍵,程序如下:
StartEnd bit 01H ;起動及停止標(biāo)志
MinSpd EQU 25 ;起始轉(zhuǎn)動速度
MaxSpd EQU 100 ;最高轉(zhuǎn)動速度
Speed DATA 23H ;流動速度計數(shù)
DjCount DATA 24H ;控制電機(jī)輸出的一個值,初始為11110 111
Hidden EQU 10H ;消隱碼
Counter DATA 57H ;顯示計數(shù)器
DISPBUF DATA 58H ;顯示緩沖區(qū)
ORG 0000H
AJMP MAIN
ORG 000BH
JMP DISP
ORG 001BH
JMP DJZD
ORG 30H
MAIN:
MOV SP,#5FH
MOV P1,#0FFH
MOV A,#Hidden
MOV DispBuf,A
MOV DispBuf+1,A
MOV DispBuf+2,A
MOV DjCount,#11110111B
MOV SPEED,#MinSpd ;起始轉(zhuǎn)動速度送入計數(shù)器
CLR StartEnd ;停轉(zhuǎn)狀態(tài)
MOV TMOD,#00010001B ;
MOV TH0,#HIGH(65536-3000)
MOV TL0,#LOW(65536-3000)
MOV TH1,#0FFH;
MOV TL1,#0FFH
SETB TR0
SETB EA
SETB ET0
SETB ET1
LOOP: ACALL KEY ;鍵盤程序
JNB F0,m_NEXT1 ;無鍵繼續(xù)
ACALL KEYPROC ;否則調(diào)用鍵盤處理程序
m_NEXT1:
MOV A,Speed
MOV B,#10
DIV AB
MOV DispBuf+5,B ;最低位
MOV B,#10
DIV AB
MOV DispBuf+4,B
MOV DispBuf+3,A
JB StartEnd,m_Next2
CLR TR1 ;關(guān)閉電機(jī)
JMP LOOP
ORL P1,#11110000B
m_Next2:
SETB TR1 ;啟動電機(jī)
AJMP LOOP ;主程序結(jié)束
;---------------------------------------
D10ms:
……
;---------延時程序,鍵盤處理中調(diào)用
KEYPROC:
MOV A,B ;獲取鍵值
JB ACC.2,StartStop ;分析鍵的代碼,某位被按下,則該位為1
JB ACC.3,KeySty
JB ACC.4,UpSpd
JB ACC.5,DowSpd
AJMP KEY_RET
StartStop:
SETB StartEnd ;啟動
AJMP KEY_RET
KeySty:
CLR StartEnd; ;停止
AJMP KEY_RET
UpSpd:
INC SPEED;
MOV A,SPEED
CJNE A,#MaxSpd,K1 ;到了最多的次數(shù)?
DEC SPEED ;是則減去1,保證下次仍為該值
K1:
AJMP KEY_RET
DowSpd:
DEC SPEED
MOV A,SPEED
CJNE A,#MAXSPD,KEY_RET ;不等(未到最大值),返回
MOV SPEED,#MinSpd;
KEY_RET:
RET
KEY:
……獲取鍵值的程序
RET
DjZd: ;定時器T1用于電機(jī)轉(zhuǎn)速控制
PUSH ACC
PUSH PSW
MOV A,Speed
SUBB A,#MinSpd ;減基準(zhǔn)數(shù)
MOV DPTR,#DjH
MOVC A,@A+DPTR
MOV TH1,A
MOV A,Speed
SUBB A,#MinSpd
MOV DPTR,#DjL
MOVC A,@A+DPTR
MOV TL1,A
MOV A,DjCount
CPL A
ORL P1,A
MOV A,DjCount
JNB ACC.7,d_Next1
JMP d_Next2
d_Next1:
MOV DjCount,#11110111B
d_Next2:
MOV A,DjCount
RL A
MOV DjCount,A ;回存
ANL P1,A
POP PSW
POP ACC
RETI
DjH: DB 76,82,89,95,100,106,110,115,119,123,12……
DjL: DB 0,236,86,73,212,0,214,96,163,165
……
DISP: ;顯示程序
POP PSW
POP ACC
……
RETI
BitTab: DB 7Fh,0BFH,0DFH,0EFH,0F7H,0FBH
DISPTAB:DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H,88H,83H,0C6H,0A1H,86H,8EH,0FFH
END
3.程序分析
本程序主要由鍵盤程序、顯示器程序、步進(jìn)電機(jī)驅(qū)動程序三部份組成,主程序首先初始化各變量,將顯示器的高3位消隱,步進(jìn)電機(jī)驅(qū)動的各引腳均輸出高電平,然后調(diào)用鍵盤程序,并作判斷,如果有鍵按下,則調(diào)用鍵盤處理程序,否則直接轉(zhuǎn)下一步。下一步是將當(dāng)前的轉(zhuǎn)速值轉(zhuǎn)換為BCD碼,送入顯示緩沖區(qū);接著判斷 StartEnd這個位變量,是“1”還是“0”,如果是“1”,則開啟定時器T1,否則關(guān)閉定時器T1,為防止關(guān)閉時某一相線圈長期通電,因此,在關(guān)閉定時器T1時,將P1.0~P1.3均置高。至此,主程序的工作即結(jié)束。這里為簡便起見,這里沒有做高位“0”消隱的工作,即如果速度為10轉(zhuǎn)/分,則顯示值“010”,讀者可以自行加入相關(guān)的代碼來處理這一工作。
步進(jìn)電機(jī)的驅(qū)動工作是在定時器T1的中斷服務(wù)程序中實現(xiàn)的,由前述分析,每次的定時時間到達(dá)以后,需要將P1.0~P1.3依次接通,程度中用了一個變量DjCntr來實現(xiàn)這一功能,在主程序初始化時,該變量被賦予初值 11110111B,進(jìn)入到定時中斷以后,將該變量取出送ACC累加器,并在累加器中進(jìn)行左移,這樣,該數(shù)值就變?yōu)?110 1111,然后將該數(shù)與P1 相“與”,此時,P1.4即輸出低電平,第二次進(jìn)入中斷時,先將該數(shù)取反,成為 00010000,然后將該數(shù)與P1相“或”,這樣,P1.4即輸出高電平,關(guān)斷了相應(yīng)的線圈,然后將該數(shù)重新取出,并作左移,即1110,1111右移成為11011111,將該數(shù)與P1相“與”,這樣P1.5即輸出低電平,依次類推,P1.7~P1.4即循環(huán)輸出低電平。當(dāng)這一數(shù)據(jù)變?yōu)?111 1111后,需要作適當(dāng)?shù)母膭樱瑢?shù)據(jù)重新變回11110111,進(jìn)行第二次循環(huán),相關(guān)代碼,請讀者自行分析。
定時時間又是如何確定的呢?這里用的是查表的方法,首先用Excel計算得出在每一種轉(zhuǎn)速下的TH值和TL值,然后,分別放入DjH和DjL表中,在進(jìn)入T1中斷程序之后,將速度值變量Speed送入累加器ACC,然后減去基數(shù)25,使其基數(shù)從 0開始計數(shù),然后分別查表,送入TH1和TL1,實現(xiàn)重置定時初值的目的。
看完這一部份內(nèi)容以后,請讀者自行完成以下工作:
1. 更改程序,將S1定義為“啟動/停止”,而S2定義為“方向”,按下S2,切換電機(jī)旋轉(zhuǎn)方向。
2. 更改程序,要求轉(zhuǎn)速從1到100。
3. 更改程序,實現(xiàn)首位無效零消隱
-
單片機(jī)
+關(guān)注
關(guān)注
6063文章
44925瀏覽量
647025 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3158瀏覽量
149147
發(fā)布評論請先 登錄
基于單片機(jī)的步進(jìn)電機(jī)式模擬器儀表系統(tǒng)設(shè)計
基于51/32單片機(jī)按鍵控制步進(jìn)電機(jī)正反轉(zhuǎn),A4988驅(qū)動
有單片機(jī)方面的大佬嗎?有幾個單片機(jī)方面的問題需要請教一下
開源閉環(huán)步進(jìn)電機(jī)控制器(原理圖+源代碼)
L298N-驅(qū)動直流電機(jī)和步進(jìn)電機(jī)的詳細(xì)資料大總結(jié)
步進(jìn)電機(jī)的控制實現(xiàn)方法

使用單片機(jī)實現(xiàn)直流電機(jī)的PWM調(diào)速控制原理圖
基于MSP430單片機(jī)的模糊邏輯電機(jī)控制

步進(jìn)電機(jī)如何自適應(yīng)控制?步進(jìn)電機(jī)如何細(xì)分驅(qū)動控制?
利用MSP430單片機(jī)控制步進(jìn)電機(jī)
步進(jìn)電機(jī)型號與步進(jìn)電機(jī)命名規(guī)則

基于STM32單片機(jī)的步進(jìn)電機(jī)控制系統(tǒng)設(shè)計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論