") 電動葫蘆中編碼器的安裝與使用方法解析
電動葫蘆中編碼器的安裝與使用方法解析
一、數(shù)字化、智能化是起重機械及電動葫蘆的發(fā)展趨勢,更高效、更安全、更經濟
隨著現(xiàn)代工業(yè)的迅速發(fā)展,電子計算機的廣泛應用,系統(tǒng)工程、優(yōu)化工程、創(chuàng)造性工程、人機工程等現(xiàn)代化理論的發(fā)展,大大加快了現(xiàn)代工業(yè)的發(fā)展進程,使社會生產力又躍上了一個新水平。長期以來物料搬運技術僅指的是各類起重運輸設備,而90年代的物料搬運系統(tǒng)逐漸增加了許多自動化的內容,包括自動識別、自動導向、自動計數(shù)、自動稱重等。為了使生產和流動能夠緊密配合,構成更大、更高效的物流系統(tǒng),計算機技術得到了廣泛的應用,起重機械如果跟不上時代,很多工作將被先進的機器人和其它機器所取代。
電動葫蘆實現(xiàn)數(shù)字化、智能化,可提高生產效率,加強安全保護,從而實現(xiàn)更經濟高效的使用效果。有關調查資料表明,65%的起重機械用戶主要是為了提高生產率、減少勞動工資,在人工成本越來越高,安全要求越來越高的情形下,要求采用先進的起重機設備的用戶便越來越多。
同時,電動葫蘆實現(xiàn)了數(shù)字化與智能化,可增加完成原來電動葫蘆無法實現(xiàn)的工作要求,比如自動三維定位,多葫蘆同步提升,多葫蘆聯(lián)動定向傾斜與翻轉等等,將電動葫蘆的應用領域擴展,可實現(xiàn)多賣出電動葫蘆,為電動葫蘆廠家?guī)砀嗟氖袌觥?/p>
二、電動葫蘆實現(xiàn)數(shù)字化、智能化,位置傳感器是最基本的第一步——全行程絕對值編碼器
旋轉編碼器是電動葫蘆實現(xiàn)位置信號反饋的基本位置傳感器,編碼器有增量型編碼器、絕對值編碼器和全行程絕對值編碼器之分。
絕對值編碼器和增量型編碼器的比較
在整個測量行程中,測量傳感器編碼器的內部是絕對值編碼的。絕對值編碼的圈數(shù)值是有限的,比如4096圈,或者經濟型的64圈、256圈,這種規(guī)定了測量圈數(shù)值行程,并確認在這個測量行程內是絕對值編碼并可安全使用的,稱為全行程絕對值編碼器。起重設備出于安全性考慮,必須使用全行程絕對值多圈編碼器。
三、電動葫蘆編碼器的安裝與使用
電動葫蘆要實現(xiàn)數(shù)字化與智能化,就要安裝位置反饋傳感器--全行程絕對值編碼器,以獲得啟升高度位置信號
電動葫蘆都帶有超載打滑裝置,所以編碼器不適合裝在電機一側,而是裝在機械傳動的一側讀取數(shù)據(jù)更可靠。
1,編碼器安裝在鏈輪側,如圖:
2,編碼器安裝在齒輪箱一側
四。電動葫蘆數(shù)字化、智能化的應用,讓電動葫蘆的市場更廣闊
1,電動葫蘆起吊高度自動控制及顯示
單個電動葫蘆控制,多個葫蘆各自獨立的控制與高度顯示
單個葫蘆安裝絕對值編碼器可以實現(xiàn)高度顯示和高度控制的功能(也可采用機械拉繩裝置安裝編碼器),編碼器信號可選擇4—20mA模擬量輸入,配合數(shù)顯表2路繼電器開關點輸出,可顯示當前電動葫蘆起升高度,2路開關點輸出可以設置葫蘆的上限位置和下限位置,即可以任意設置葫蘆的升降高度。
適用于各種起重機械的高度及位置定位,實現(xiàn)起重設備的自動化控制,如垃圾搬運起重機、港口集裝箱起重機、各類自動化輸送線、危險防爆環(huán)境下的起重操作等。
編碼器的絕對信號,能傳輸給其他上位機,實現(xiàn)自動化功能,比如同步糾偏、自動控制、
2,電動葫蘆起吊高度上下空間防碰撞保護
安全高度控制:相當于在原有機械限位的基礎上,增加了一組電子限位,形成了一個安全防撞緩沖區(qū),能有效減少機械故障及降低維護成本;由于有數(shù)字化可調技術,這樣的高度可以很方便的設置并且精度遠比機械限位開關高。
吊鉤高度實時顯示:能監(jiān)測貨物的起吊高度,避開危險區(qū)域,提高起重作業(yè)的安全性。
3,電動葫蘆行走小車直向、橫向位置控制,實現(xiàn)啟升吊鉤三維定點控制
行走小車、大車同樣可以安裝全行程絕對值編碼器,這樣可以實現(xiàn)啟升吊鉤三維定點可控制,例如封閉式自動垃圾吊,汽車廠車身噴涂、焊接,沖壓模具開模等等。
4,電動葫蘆快慢速安全停車效率控制
安裝有全行程絕對值編碼器的電動葫蘆,可以在啟升初期選用慢擋,并切換進入快擋,當需要停止時可以先進入慢擋減速,然后再停車,這樣既可以多用快擋提高效率,又可以避免電機的急啟、急停,保護電機延長壽命,并確保起吊物平穩(wěn);如果是大車、小車也安裝了編碼器,可實現(xiàn)平穩(wěn)移動與停止,防止搖擺,從而實現(xiàn)既高效又安全的葫蘆使用效率,提高電動葫蘆用戶的生產率并降低生產成本。
5,雙葫蘆同步、多葫蘆同步糾偏控制
雙個葫蘆都安裝有全行程絕對值編碼器,可兩個葫蘆高度不斷比較,當兩個高度不同并超過設定偏差標準,可通過偏差葫蘆的變頻調速、快慢檔切換、甚至停車修正,以糾偏修正兩個葫蘆啟升高度,以達到相同高度的上升與下降。多個葫蘆也一樣可以同步控制,可設定一個葫蘆為主吊鉤,其余葫蘆均與其做同步糾偏修正(和雙葫蘆同步一樣),從而實現(xiàn)多葫蘆同步控制。
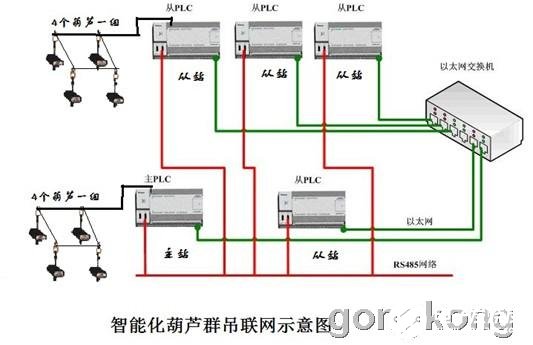
葫蘆群吊同步控制(4個以上一組的多組控制):可將4個葫蘆設定為一組,用一個小型PLC控制,然后多個PLC之間可用PLC的現(xiàn)場總線聯(lián)網,實現(xiàn)PLC之間的通訊信息交換,以一個PLC的4個葫蘆吊鉤高度作為主吊鉤組,其余組別與其同步對比,調整高度,可實現(xiàn)多組葫蘆同步控制,例如4個葫蘆、16個葫蘆、。。直至64個葫蘆的同步。
雙葫蘆及葫蘆群吊實現(xiàn)同步功能實現(xiàn),為世界范圍內起重設備業(yè)內領先的全行程絕對值多圈編碼器同步技術,強大的信號抗干擾特征,無電機與變頻器干擾擔憂,精確同步控制,無停電滑動丟失零位位置擔憂。雙吊點及多吊點實時同步對比,控制電機速度調整,同啟同停同高度;聯(lián)動控制,實現(xiàn)特殊作業(yè),確保快速平穩(wěn)安全起吊。配合多種工業(yè)現(xiàn)場總線技術,可快速、安全、抗干擾。用于汽車涂裝線,制漿造紙自動化搬運等。
6,雙葫蘆定點聯(lián)動、多葫蘆定點聯(lián)動,定向傾斜,翻轉控制;
----智能化葫蘆群吊,第三代葫蘆已經來臨!
兩個葫蘆或葫蘆群吊各自安裝的編碼器的絕對信號,能傳輸給PLC或其他上位機,按設計的程序實現(xiàn)各種自動化功能,比如按時間先后要求的多個葫蘆復雜高度控制、起吊高度的特定傾銷角,葫蘆群吊起吊物件的旋轉、翻轉等等復雜動作,打個比方就是可實現(xiàn)“牽線木偶”的動作效果了。
可實現(xiàn)復雜的聯(lián)動功能,比如舞臺機械葫蘆舞臺燈光的追光效果,例如汽車涂裝間的翻轉等等。
電動葫蘆數(shù)字化、智能化時代:
——三維終點定位:降低循環(huán)時間,實現(xiàn)精確定位
——安全受限保護區(qū)域:避免人為錯誤,保護員工和設備的安全
——高效的緩啟緩停,防搖擺控制:避免負荷擺動,節(jié)約時間,使工作更安全、更方便
——同步起升:實現(xiàn)吊鉤平衡,操作簡單安全
——智能化群吊控制:聯(lián)動復雜動作,實現(xiàn)多點三維智能化復雜聯(lián)動,實現(xiàn)智能葫蘆群吊。
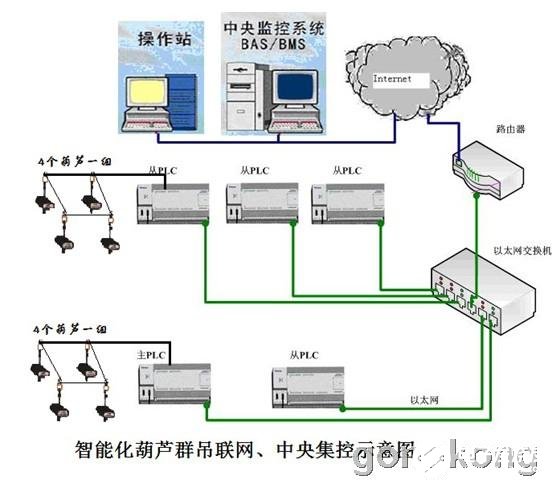
葫蘆的發(fā)展從手動到電動,從單個葫蘆起降到智能化葫蘆群吊控制,從眼睛觀察到中央集控;
現(xiàn)在,葫蘆已進入了第三代時代--數(shù)字化、智能化葫蘆群吊,新的時代來臨了,您還等什么?
責任編輯;zl
-
編碼器
+關注
關注
45文章
3775瀏覽量
137170
發(fā)布評論請先 登錄
拉線編碼器安裝指南:步驟與注意事項

電動葫蘆數(shù)據(jù)采集實時監(jiān)控系統(tǒng)方案





 工商網監(jiān)
工商網監(jiān)
評論